
露天煤场自动盘煤方法的研究
2011-04-10 02:23刘艳玲刘海烨
制造业自动化 2011年14期
刘艳玲,刘海烨,秦 健
LIU Yan-ling,LIU Hai-ye,QIN Jian
(天津理工大学 机械工程学院,天津 300384)
0 引言
在我国的火电厂中,燃煤电厂占有很大的比例,燃煤电厂的燃煤成本占整个电厂生产成本的70%~80%。传统的煤场存煤量测量方法是先用推土机把煤堆整形,使其外形近似梯形,再用经纬仪和米尺进行人工丈量,根据经验、简单计算或估算得出所测煤堆的体积,这种盘煤方法不仅需要耗费大量的人力和物力,其测量结果也极不准确,严重制约了电厂现代化管理水平的提高。如何对煤场存煤量自动地进行准确测量,已成为长期困扰燃煤电厂的一大难题。[1]近年来随着计算机技术的快速发展,新型的自动盘煤方法是利用激光测距仪和行程传感器组成的硬件系统采集回煤堆表面三维坐标数据,利用图形处理器(GPU)的高速浮点运算能力和几何运算能力对渲染的三维图像进行重新采样、插入采样点等处理,从而生成较准确的煤堆三维立体模型,并利用此模型进行煤堆体积的计算。这种新型的自动盘煤方法在盘煤的实时性和准确性方面都有显著的改善,取得了比较满意的结果。
1 盘煤硬件采集系统的构成
本盘煤硬件数据采集方法是将激光测距仪和步进电机安装在煤场取煤的斗轮机的悬臂上,行程传感器触点安装在待测煤堆的纵向区域。在控制器的控制下,步进电机带动激光测距仪旋转固定角度,得到实时角度数据;激光测距仪对煤堆表面连续作定点扫描测量,得到高度数据;行程传感器触点安装在待测煤堆的纵向区域,随斗轮机沿煤场纵向移动,得到位置数据。激光测距仪的测得的距离信息,步进电机所获得的旋转角度信息和行程传感器所获得的位置信息形成所测煤堆三维坐标数据。控制器将采集的三维坐标数据传输到PC机进行数据处理及管理,如图1所示。
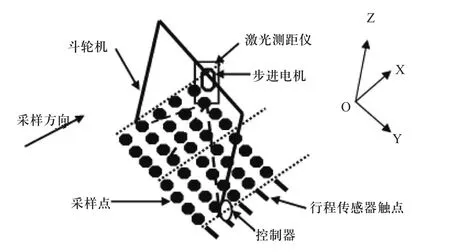
图1 盘煤数据采集结构示意图
自动盘煤硬件系统由控制器、数据采集单元、步进电机控制单元和串行数据传输单元等组成,硬件系统结构如图2所示。主控单元采用AT89C52单片机系统构成,实现对硬件系统的控制;数据采集单元采用激光测距仪、行程传感器等构成,实现对煤场数据的采集;步进电机控制单元采用步进电机驱动器控制,控制步进电机带动激光测距仪转动一定的角度;串行数据传输单元采用MAX232电平转换及驱动器件,实现盘煤硬件系统与PC机的串行数据通信,将采集数据传输到PC机。
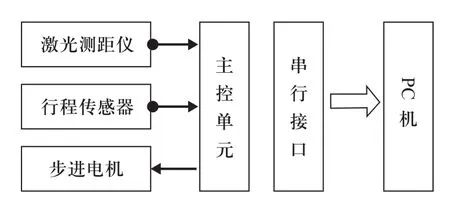
图2 盘煤硬件系统结构示意图
2 盘煤数据处理及图像生成方法
本盘煤方法采用Microsoft Visual Studio 2005 Sp1 及DirectX SDK 2009.3软件,对采样数据进行处理并生成煤堆的三维图像。采样数据的处理过程主要集中在GPU中进行,充分利用其高速的浮点运算能力和并行处理能力。在解决显存和主内存之间反复多次进行数据读取的实时性问题时,本方法采用渲染到纹理技术来减少显存与主内存之间数据交换。本盘煤方法通过GPU对采样数据进行渲染后,进行重新排序、网格化、立体图渲染等处理之后,生成较精确的煤堆三维立体图,并利用此模型进行煤堆体积的计算。
2.1 采样数据的重新排序
由于采样人员在采集数据过程中采集的每行数据个数是不定的,就可能造成采样数据的杂乱无序,所以首先要对数据进行重新排序,为后续的数据处理做准备。假设三维坐标数据是按x方向采集的,且z向坐标分量反映的是煤堆的形态,所以对三维坐标数据的重新排序,也就是对y向坐标分量的重新排序。本盘煤方法选用选择排序法对数据进行重新排序,如图3所示。
2.2 采样数据插入采样点
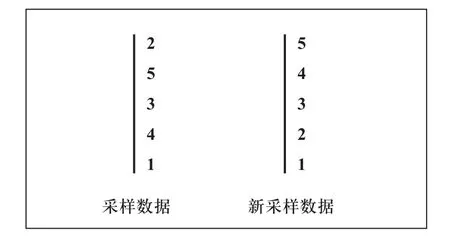
图3 采样数据重新排序示意图
由于激光测距仪采集每一行采样点的个数是不完全一样的,进而造成每行采样数据在y向分量上并不是完全的对应,而煤堆三维图像的建立需要对应规则分布的数据,所以就需要在采样数据中插入一些采样点,使采样数据在每行之间建立行间完全对应关系。
采用线性插值的方法对采样数据进行处理,具体方法为:采样数据行线段的起终采样点和终点采样点数据不变,插入的采样点在采样行线段范围之内进行,如果当前线段上一个采样点数据的y分量值与它相邻线段内部存在y分量值与之相等的一个点,就认为需要在相邻线段内插入一个采样点(x,y,z),插入采样点的x分量为当前线段的x分量,插入采样点的y分量为相邻采样点相对应y分量,z分量为这个点所在线段处的z分量线性插值结果,如图4所示。
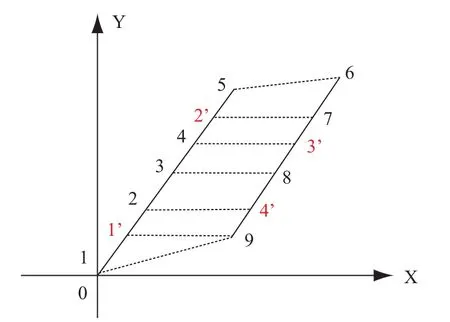
图4 采样数据插入采样点示意图
图4所示为两行采样数据插入采样点的示意图,数字表示采样数据的采样点,带“’”的数字表示在采样数据中插入的采样点。
2.3 采样数据边界的划分
采样数据边界的划分关系着煤堆数的确定、三维图像形态是生成煤堆三维图像重要组成部分和关键。本盘煤方法采用对采样点周边采样数据比较的方法对采样数据进行边界的快速划分。假设遍历到某个采样点时,采样点数据先与整型变量比较,以判定采样点是否为边缘点,在此假定此采样点为非边缘点,则按顺序检索此采样点的左侧、左上、正上、右上四个采样点,当其中有采样点具有组索引时,表明此采样点与其它采样点相接,后面具有组索引的各采样点的组索引和当前此采样点的组索引赋值为此组索引,且这些组索引所指向的组信息进行合并,而当这些采样点都不存在组索引时,那么表明此采样点与这些采样点不相接,此采样点的组索引为新组索引。由此方法遍历所有采样行数据即可完成边界的划分,如图5所示。
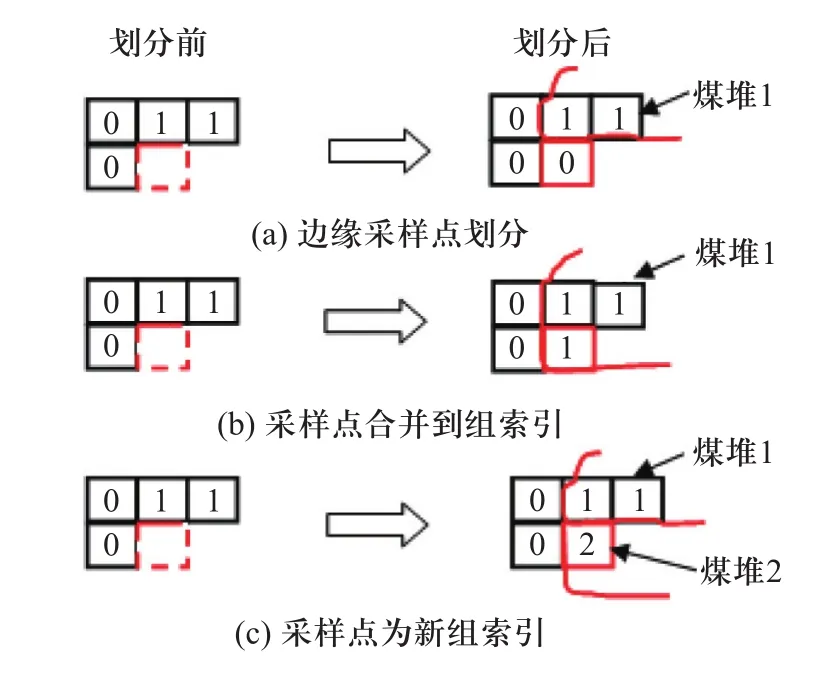
图5 采样数据边界的划分示意图
图5中,实线框表示已具有组索引的采样点,如边缘组索引0和煤堆组索引1,虚线框表示正在遍历的采样点,图5(a)表示该点为边缘采样点时,则将该点合并到组索引0;图5(b)表示该点与煤堆1具有相同的组索引,则将该点合并到组索引1;图5(c)表示没有与该点组索引相同的组索引,则将该点赋值为新组索引2。
2.4 数据的网格化及渲染
网格化是将散乱的空间三维坐标点集按照相应的算法拟合成互不交叉的三角形网。采样数据网格化后可生成网格化的三维立体图,为下步生成煤堆三维立体图做准备。本方法采用Delaunay三角剖分重构算法对采样数据进行网格化处理,Delaunay算法能将采样数据进行合理地剖分,并连接成三角形网格,该算法能使剖分得到的所有三角形的最小内角之和最大,使任一三角形外接圆中均不包含点集中的其他点,各三角形尽可能接近于等边三角形,避免了狭长三角形的存在,因此生成的三维网格也较优,并且能较好的降低算法的复杂程度[10]。
本方法采用shader方法进行渲染,并且渲染工程的宽高分别为采集数据x分量与y分量的跨度。在顶点shader中定义输出分量包含高度分量,然后把每个顶点上的高度分量传出。在像素shader中经过GPU的光栅化步骤,自动插值出每个像素的高度分量,把这个分量输出到深度缓冲区中,从而完成了整个渲染过程。
3 盘煤方法仿真实验
本仿真实验利用Autodesk Mechanical软件生成的三维立体图作为模拟的煤场煤堆并采集其表面点的三维坐标作为采样三维坐标数据,根据此采样三维坐标数据生成煤堆三维立体图,从而验证本盘煤方法的可行性。图6所示为使用Autodesk Mechanical软件生成的模拟煤堆三维立体图,空间坐标原点为左下点坐标。图7所示为采集其表面点生成的模拟采样三维坐标数据文件(txt文件)。
根据本盘煤方法可较快速、准确地生成煤堆的三维立体图,图8所示为煤堆网格立体图,是采样三维坐标数据网格化后生成的三维网格图,主要反映媒体的结构并为生成煤堆三维立体图做准备。图9所示为生成的煤堆三维立体图,可以直观的反映被测煤堆的三维形态。
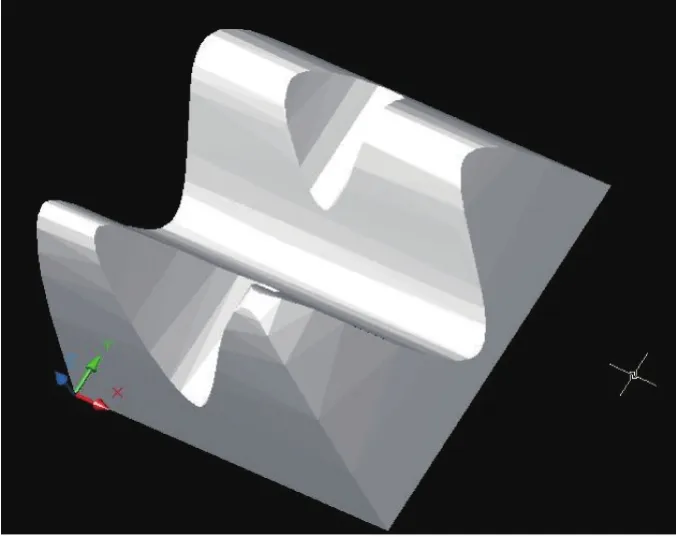
图6 煤堆模拟三维立体图
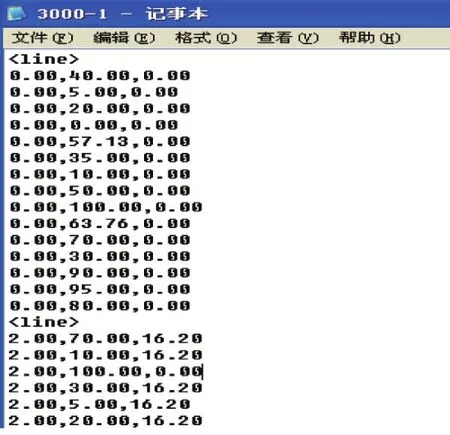
图7 模拟采样坐标数据
4 结论
本盘煤方法利用激光测距仪和行程传感器组成的硬件系统采集煤场表面三维坐标数据,通过GPU进行渲染后,进行重新采样、插入采样点和网格化等数据处理,最后得到所测煤堆的三维图像。本方法充分利用图形处理器(GPU)具有的高速浮点运算能力和几何运算能力,对采集的大量三维坐标数据进行处理,从而能够较快速、准确的生成所测煤堆的三维图像。综上所述,本自动盘煤方法在实时性和准确性方面都有显著的改善,取得了比较满意的结果。
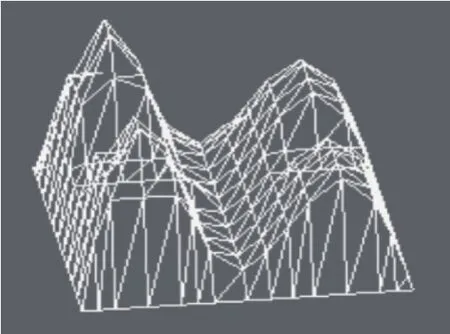
图8 煤堆三维网格图

图9 煤堆三维立体图
[1] 王朝辉,于萍,姚万业,等. 便携式激光盘煤系统的研究应用[J]. 河北电力技术,2003,22(4): 31-34.
[2] 谭久宏,周雄超,吴钦章. 基于GPU 的数字图象处理[J].科技文汇,2006(7).
[3] Liu yanling,Qin jian and Xie ning “Study for Measurement Method for Coal Volume on Base of GPU”,IEEE Trans Future Computer and Communication,2010,3: 412-414.
[4] 张冬生,杨耀权,何晓燕等. 煤场体积测量中三维模型的建立[J]. 计算机测量与控制,2003,11(3): 168-170.
[5] 韩宏彬. 储煤场煤量激光盘点系统的应用误差分析[J].应用能源技术,2009(9).
[6] Joo -Hwee Lim,“Photograph retrieval and classification by visual keywords and thesaurus”,New Generation Computing,2000,18(2): 147-156.
[7] TongAnmin. “A Computer Management System for Coal Weighing Belt in Power Plant”,electronies&Automation,1998,27(6): 12-15.
[8] 刘磊,姚万业,翟永杰,等. 基于计算机视觉的便携式激光盘煤系统的研究[J]. 华北电力大学学报,2005,32(2): 62-66.
[9] Xie ning,Qin jian,Liu yanling. “Study for Generation Method of 3D Coal Pile Image in Coal Yard”,20103rd International Conference on Computer and Electrical Engineering,2010,9: 539-541.
[10] 张文军,舒新前,姜洪才等.基于激光三维扫描的不规则煤场测量系统设计[J].媒体科学技术,2009,37(5): 111-114.
[11] 靳海亮,卢小平,刘慧杰. 利用可编程GPU硬件进行大规模真实感地形绘制[J]. 武汉大学学报(信息科学版),2010,35(2): 143-146.
猜你喜欢
商业2.0-市场与监管(2021年6期)2021-09-10
能源工程(2021年2期)2021-07-21
河南工程学院学报(自然科学版)(2021年2期)2021-07-03
中国工人(2020年5期)2020-11-17
矿业安全与环保(2020年5期)2020-11-03
读者(2019年22期)2019-10-31
新教育论坛(2019年30期)2019-09-10
科学家(2017年16期)2017-09-20
价值工程(2017年8期)2017-03-25
卷宗(2017年1期)2017-03-17
