
高心墙堆石坝坝面碾压施工仿真理论与应用
2011-06-07 02:15钟登华赵晨生
中国工程科学 2011年12期
钟登华,赵晨生,张 平
(天津大学水利工程仿真与安全国家重点实验室,天津 300072)
1 前言
高心墙堆石坝施工过程受自然环境、坝体结构、工艺技术、作业方式、机械设备等诸多因素影响,具有很强的不确定性和半结构化等特征,难以通过简单的数学解析模型来分析,而施工仿真技术为研究和分析高心墙堆石坝复杂的施工过程提供了有效途径。坝面碾压作为高心墙堆石坝施工中的最关键工序,也是一个遵循一定施工规则下的动态随机过程,直接关系到整个工程的进度和质量。以往的堆石坝施工仿真研究中[1~7],多以碾压层为仿真单位,采用施工面积比碾压机工作效率来计算碾压时间。这是一种经验性的、不精确的简单计算方式,难以全面描述和反映出蕴含在碾压过程中的复杂内部规律。因此,以高心墙堆石坝中承载施工质量和进度信息的最小单位填筑单元为研究对象,对坝面碾压过程进行精细化的仿真分析是十分必要的。文章详尽分析了高心墙堆石坝坝面碾压过程,提出了高心墙堆石坝坝面碾压施工仿真基本原理,建立了填筑单元碾压施工的仿真模型,为全面分析和控制高心墙堆石坝坝面碾压过程提供了新的分析方法和科学依据。
2 高心墙堆石坝坝面碾压过程分析
2.1 坝面碾压系统分解―协调
高心墙堆石坝坝面碾压过程是一项复杂的动态系统工程,根据其动态特征和内部各个环节的性质,可分为碾压目标子系统、碾压参数子系统和碾压施工条件子系统。碾压包含质量和进度两个目标,质量目标是指压实指标检测值满足控制标准,进度目标是指在满足质量目标的前提下尽量追求较短碾压工期;碾压参数是确保大坝碾压目标实现的关键,主要包括碾压遍数、碾压机行进速度、碾压机行进角度、碾压机激振力状态、错距距离等;碾压施工条件包括填筑单元的形体信息、施工机械的数量和型号等,这些因素是进行碾压的基础条件。
这三个子系统之间既相互影响又相互联系:一方面,施工条件决定填筑单元采取的碾压参数,而碾压参数要根据施工条件的变化而动态调整,与之保持相适应协调;另一方面,采取不同的碾压参数(如改变碾压遍数、错距距离等)会直接影响填筑单元碾压目标的实现,而为了达到某个控制目标则需要不断的修改碾压参数;施工条件如形体信息的变化通常会影响填筑单元的碾压工期,而为了保证填筑单元碾压目标则需要对施工条件进行分析。高心墙堆石坝坝面碾压系统分解-协调分析如图1所示。

图1 高心墙堆石坝坝面碾压系统分解-协调分析Fig.1 System decomposition-coordination coupling analysis
2.2 填筑单元碾压过程数学逻辑模型
高心墙堆石坝坝面碾压过程是一个复杂的随机动态过程,综合考虑各环节之间施工逻辑关系和各种复杂约束条件,可建立高心墙堆石坝填筑单元碾压随机动态数学模型:

式(1)中,i为填筑单元编号;P(i)为填筑单元i的碾压工期;R(i)=[Rs(i),Rm(i)]为填筑单元i的施工条件;Rs(i)为形体信息;Rm(i)为机械配置;M(i)=[V(t),θ(t),b(t),n(i)]为填筑单元i的碾压参数;V(t)为碾压机随机行进速度;θ(t)为随机行进偏移角度;b(t)为随机错距距离;n(i)为碾压遍数。

式(2)中,QU[]为碾压质量指标检测数据集;QUc[]为碾压质量控制标准集。
3 高心墙堆石坝填筑单元碾压施工仿真基本原理
3.1 仿真策略
高心墙堆石坝坝面填筑单元一般采用进退错距法进行碾压,碾压机从填筑单元的一端沿坝轴线方向向另一端前进,到达另一端边界后沿垂直坝轴线方向进行错距,然后再沿坝轴线方向后退至开始的一端,这一过程反复进行,直到整个填筑单元碾压合格。可以看出,碾压机机械前进、后退以及错距等事件都是在离散时间点上发生的,在时间上呈非连续变化,因此,填筑单元施工系统是一个离散事件系统,其仿真为离散事件系统仿真。但由于人为因素对碾压机的控制,碾压过程是一个随机过程,碾压机行进速度、偏移角度是随时间不断变化的,每一次的错距距离以及错距所用时间也不是固定的。为了准确描述这一复杂的动态系统,仿真中对于碾压过程仿真采用固定时间推进法,并以秒为仿真时间单位。通过多次仿真和统计分析,可以得到施工工期和各关键点工期的统计特性。
3.2 仿真模型
在碾压过程中,填筑单元的状态随着碾压机的运行发生变化,从未碾状态到已碾状态。整个碾压过程可以看成一个以碾压机械为“服务台”,填筑单元作为填筑服务“对象”的随机有限源服务系统,填筑单元在碾压过程中等待各碾压机械的服务,其模型结构如图2所示。
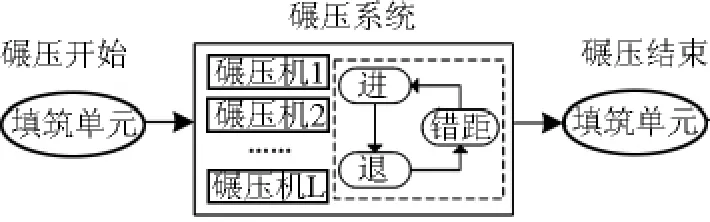
图2 填筑单元碾压过程仿真模型Fig.2 Simulation model of the filling unit
3.3 填筑单元碾压仿真参数分析
1)碾压参数。由于驾驶员的操作水平及不可避免的外力干扰(如:堆石区的大块石)等,实际的碾压速度V并不是定值,而且碾压轨迹也不是很多条平行的直线,而是波折线。这说明在碾压机前进过程中,速度V是一个二维的随机矢量。同理,由于错距也是有驾驶员控制的,错距距离以及所用时间也是随机值。因此,各碾压参数均是符合某种概率分布的随机数。
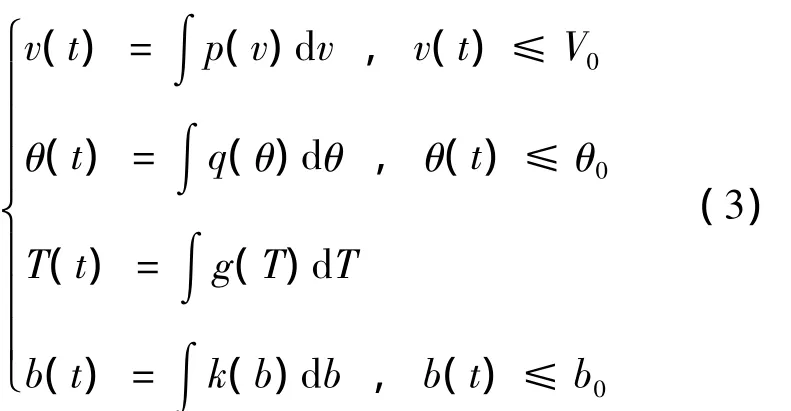
式(3)中,p(v)、q(θ)、g(T)、k(b)分别为碾压机行驶速度v、偏移角度θ、错距时间T和错距距离b的概率密度函数,可通过对高心墙堆石坝碾压质量实时监控系统[8]采集到的实时施工信息数据进行统计分析得出;V0、θ0、b0分别为速度、偏移角度和错距距离的最大允许值。
2)碾压历时。由于碾压必须沿坝轴线方向进行,错距沿河流方向进行,且要求分段碾压搭接宽度垂直方向不小于0.3~0.5 m,顺碾压方向应为1.0~1.5 m,所以可以根据仿真过程中实时的碾压机的碾压位置与填筑单元形状的相对关系,来判断错距的发生以及碾压活动的结束,进而计算出碾压历时。规定仿真中的坐标体系,顺坝轴线方向从左岸到右岸为x正方向,顺河向为y正方向。借助外部图形处理软件VISUALGEO可以得到填筑单元的边界坐标。
碾压机第i次从填筑单元一端至另一端前进或者倒退碾压一次的历时为:Ti=w

式(4)中,w为本次碾压中仿真时钟推进次数;Vx为根据仿真中以秒为步长产生的随机速度和随机偏移角度计算出的x方向分量;Xi1、Xi2分别为和xw、xw+1在同一y坐标下的填筑单元边界x方向坐标。
填筑单元总碾压历时:

式(7)中,B为填筑单元的沿河流方向最大宽度;bi为仿真中第i次错距时的随机错距距离;ti为第i次错距时的随机错距时间;ΣVy为速度在y方向分量的累计值。
3)碾压遍数合格率。碾压活动结束后需要计算碾压遍数合格率以判断碾压质量是否满足控制标准。对于碾压起始和结束的条带,按正常错距法无法压到要求的遍数,施工时一般采用前进后退不错距的方法,压到要求的碾压遍数。

碾压遍数合格率计算:

式(8)中,num 为n(N(i,j))≥n0的网格N(i,j)的个数;n0为标准碾压遍数。
4)补碾时间。当碾压遍数合格率Q小于控制标准Q0时,需要对填筑单元进行补碾。由于需要补碾的部位和遍数的随机性较大,所以文章中认为补碾时间为不合格区域面积的函数,并考虑时间利用系数:

图3 碾压遍数计算示意图Fig.3 Schematic diagram of rolling number calculation

式(9)中,kt为时间利用系数;t0为固定补碾历时;n为沿水流方向划分的网格个数;v为仿真中按秒产生的随机速度。
3.4 仿真流程
程序开始时,系统更新仿真参数,初始化模型,然后以单位时间步长推进仿真时钟,产生随机速度和偏移角度,根据碾压机在x、y方向上的位置与填筑单元形状的相对关系,来判断下一步碾压机的行进路线。若达到填筑单元x方向边界,则发生错距,产生随机错距距离和错距时间,推进仿真时钟,同时改变碾压机行进状态;若达到填筑单元y方向边界,则碾压工作完成。若碾压未完成,则重复上一过程直到碾压完成。碾压完成后计算碾压遍数合格率,如果满足控制要求,则仿真结束,输出碾压历时;否则,需计算补碾时间。高心墙堆石坝填筑单元碾压仿真流程图如图4所示。
3.5 模型验证
文章采用置信度检验模型。置信度法是仿真模型有效性确认中定量分析的一种重要的统计检验法[9]。假设总体服从正态分布,为建立输出变量均值E(X)的置信区间,通常是对系统进行固定次数的独立重复仿真运行。对某系统共作R次独立重复仿真运行(R≥2),Xi表示第i次运行仿真值。将X1,X2,…,XR近似看成独立同分布随机变量的样本观察值,则均值和方差的点估计为:

图4 填筑单元碾压仿真流程图Fig.4 Flow chart of simulation program for filling unit

故E(X)的100(1-α)%置信区间为:

式(12)中,tα/2(R-1)是自由度(R-1)的t分布上的α/2的百分位点。
若实际观测值落入置信区间内,则认为模型能较好地反映真实系统。
4 工程实例
糯扎渡堆石坝坝体为砾石土心墙堆石坝,坝顶长630.06 m,坝顶宽18 m,坝顶高程为 821.5 m,最大坝高为261.5 m,由心墙防渗料区、上下游反滤料区、上下游细堆石料区、上下游粗堆石料区和上下游护坡块石料区组成。以其心墙某填筑单元为例,进行碾压仿真分析。
4.1 仿真参数
1)填筑单元形体信息。单元编号:01-14-0210-0699b,平行坝轴线边长L=110 m,垂直坝轴线边长B=44 m,高程EL=730.7 m。
2)碾压机械配置信息。碾压机型号:26T凸块碾;碾压机数量:5台,碾轮宽度:2 m。
3)碾压参数。采用进退各一遍再错距的碾压方法,标准碾压遍数n0=10遍,碾压遍数合格率控制标准Q0=90%,碾压机最大允许速度V0=3.0 km/h。
4)随机变量。碾压机行进速度v~N(2.5 km/h、0.1),碾压机行进偏移角度θ(弧度)~N(0、0.1),错距距离b~N(0.35 m、0.001),错距时间T~N(25 s、4)。
5)时间信息。碾压开始时间:2011-5-7 21:26:43,碾压结束时间:2011-5-8 01:26:23,碾压历时:4 h,时间利用系数:0.85。
4.2 填筑单元碾压仿真分析
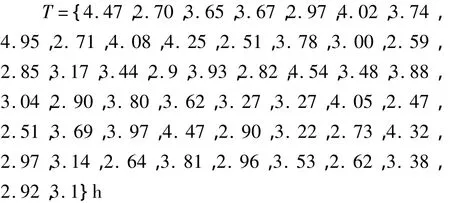
输入仿真参数,更新模型,对心墙区编号为01-14-0210-0699b的填筑单元的碾压过程进行施工仿真50次,碾压历时依次为:
对应的每次仿真的碾压遍数合格率依次为:

借助SPSS软件对碾压历时仿真结果进行K-S检验,如图 5所示,由此可知:碾压历时T~N(3.39、0.623)的正态分布。

图5 碾压历时K-S检验结果Fig.5 K -S test result of rolling time
4.3 仿真模型验证分析
经计算,=3.39 h,S2=0.388。文章取置信度为95%,则α=0.5,查t分布表后计算可得碾压历时的置信区间为(3.21 h、3.57 h)。考虑时间利用系数后,实际碾压历时T=3.4 h。实际工期落入此区间内,说明工期差异不明显,仿真模型能较好地反映实际施工系统。
5 结语
坝面碾压是高心墙堆石坝施工中最关键的工序,对其过程进行全面的描述和系统的分析,对于高心墙堆石坝施工质量和进度控制具有重要意义。笔者等对高心墙堆石坝坝面碾压过程进行了分解-协调分析,通过综合考虑各环节之间的施工逻辑关系和各种施工约束条件的影响机制,建立了高心墙堆石坝坝面碾压施工数学模型,提出了高心墙堆石坝坝面碾压施工仿真理论,构建了以填筑单元为基本仿真单位的精细化仿真模型,并设计了仿真计算的流程。所提出的理论方法在糯扎渡心墙堆石坝工程中得到了实际应用,对其填筑单元碾压过程进行了仿真分析,结果符合客观实际,为指导高心墙堆石坝坝面碾压施工提供了技术手段和理论指导,具有很好的实际应用价值。
[1]Zhong D H,Zhang P,Wu K X.Theory and practice of construction simulation for high rock-fill dam[J].Science in China Series E:Technological Science,2007,50(1):51-61.
[2]钟登华,胡程顺,张 静.高土石坝施工计算机一体化仿真[J].天津大学学报,2004,37(10):872-877.
[3]钟登华,张发瑜,李明超,等.面向对象的堆石坝施工系统仿真与优化研究[J].水力发电,2003,33(3):87-89.
[4]李 翔,李玉珠.土石坝施工仿真模拟中坝面填筑系统的初步研究[J].水电站设计,2005,21(4):2-4.
[5]李家亮,李玉珠,李 翔.心墙堆石坝施工仿真系统研究及应用[J].水力发电,2010,36(1):17-19.
[6]王仁超,吴桂兰,李 喆.高土石坝施工系统仿真模型及其集成研究[J].水利水电技术,2002,33(12):23-25.
[7]刘珊珊,周宜红,刘 全,等.堆石坝施工的实时动态仿真系统研究[J].系统仿真学报,2004,16(11):2525-2528.
[8]Zhong D H,Cui B,Liu D H,et al.Theoretical research on construction quality real-time monitoring and system integration of core rockfill dam[J].Science in China Series E:Technological Science,2009,52(11):3406-3412.
[9]王维平,朱一凡,华雪倩,等.仿真模型有效性确认与验证[M].长沙:国防科技大学出版社,1998.
猜你喜欢
价值工程(2022年25期)2022-09-01
水力发电(2021年5期)2021-08-11
建材发展导向(2021年9期)2021-07-16
山东交通科技(2020年3期)2020-08-05
人民长江(2019年11期)2019-12-03
建材发展导向(2019年5期)2019-09-09
水利水电科技进展(2019年3期)2019-05-30
黄钟-武汉音乐学院学报(2018年1期)2018-06-05
昭通文学(2016年3期)2016-11-08
中国房地产业(2016年9期)2016-03-01
