AET座架伺服控制系统的设计分析
2011-06-14 01:37刘会锋乔建江
无线电工程 2011年5期
刘会锋,乔建江
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
随着空间电子技术的飞速发展,地球同步卫星系统得到了广泛的应用,与此同时,国内外也都在大力发展极轨卫星系统,使卫星遥感技术服务于科学试验、地球资源探测、环境监测、海洋及气象情报、灾情探测等各种业务。在地面站设备中,对于遥感遥测、测控测角而言,伺服控制系统都是重要的组成部分。
极轨卫星的运行轨迹与赤道有很大的夹角,与南北极夹角较小,极轨卫星根据地球自转及其自身的运行规律,一般每隔数日将地球表面扫描一遍。由于存在每一周的扫描轨迹不尽相同,因此作为对卫星跟踪与信息交换的地面站,无论怎样布站都会存在极轨卫星通过天线顶空的情况。对倾斜轨道航天器来说同样存在这一问题[1]。
极轨卫星或倾斜轨道的航天器在通过地面站天线顶空时,离地面站最近,星上和地面信息交换信号最强,研究人员希望在此时接收到信息数据。有些极轨卫星的信息传输是定时的,也有些过境卫星在通过境内时不传送信息,因此想要获得更多的信息,地面站天线跟踪控制系统接收范围越大越好。
1 天线过顶跟踪分析
方位-俯仰型天线座在天顶附近存在一个跟踪“盲区”。当目标经过这一“盲区”时,地面站天线方位轴就会瞬时调转180°,这对方位轴有一个很大的速度要求(理论上为无穷大),所以实际上是不能实现的,这样必然造成目标的丢失,这就给地面站的跟踪系统带来了一定的困难。为保证卫星在通过地面站天顶时跟踪系统不丢失目标,地面站必须采取有效措施解决过顶跟踪问题。这里采用了AET(可预置方位轴倾斜方向的AE式三轴座架)形式的座架来实现遥感卫星的过顶跟踪[2]。
2 伺服控制系统组成
伺服控制系统主要由天线控制单元、天线驱动单元、轴角编码单元和安全保护单元等组成,系统组成框图如图1所示。

图1 伺服控制系统组成
3 伺服控制系统设计
3.1 天线控制单元
天线控制单元(ACU)由数据采集卡、D/A(数字/模拟)转换卡、网卡、通用工业控制计算机和自己设计的电路板组成,天线控制软件安装于ACU内。
ACU是跟踪控制系统的核心部分,主要完成跟踪任务的自动化监测、数据处理、协调控制系统内的设备完成对目标的精确跟踪、完成天线的运动姿态控制以及各种控制策略的实时计算和实施,同时对各测量信息进行记录、分析和显示,向站控管理子系统上报设备状态和天线角度等信息。环路控制采用增量式数字PI(比例、积分)控制算法来保证跟踪系统达到良好的跟踪精度和控制效果。
3.2 天线驱动单元
天线驱动单元分为方位轴驱动单元、俯仰轴驱动单元和倾斜驱动单元3个部分,分别驱动天线的方位轴、俯仰轴和倾斜轴。
在高精度天线系统中,齿隙对系统的定位精度和系统的稳定性等指标有很大的影响,因此一般都采用不同的消隙措施,以保证系统的指标,双电机消隙是一种很好的方法。
双电机消隙的基本原理是用2个相同的电机通过各自的减速装置驱动同一个负载,通过力矩偏置和力矩均衡电路去控制电机的工作状态,在负载转矩较小时,2个电机输出方向相反的力矩。一个电机的工作状态为主动电动机状态,另一个电机的状态为被动制动状态,这2种状态随着负载力矩的方向变化而发生转变,并且这种变化是平滑连续的,这样就保证负载的低速运转平滑且无齿隙出现。随着负载力矩的增大被动状态的电机也变为主动状态,2个电机共同拖动负载。
3.3 轴角编码单元
轴角编码单元主要是将天线的角度位置量转换为数字量,采用旋转变压器和轴角转换器(RDC)组合电路方案,这种方案的优点是转换精度高,直接产生数字信号,使用方便,并且不易受到干扰,角度的精度根据实际要求选择。
试验中旋转变压器采用国产高精度套轴1∶32对极双通道旋转变压器,RDC采用14位编码器,经过双通道粗精结合得到17位精度的数据。
3.4 安全保护单元
安全保护单元由锁定机构和限位开关组成,安装在天线座上相应的位置。
在天线收藏后需要进行入锁操作,以保证在大风天气下天线不损坏。
限位开关用于限制天线的转动范围,当天线转到限位开关处时,限位开关发出限位信号,禁止天线转动,以保证天线的安全。
3.5 坐标转换
基于AET座架的过顶跟踪伺服系统是闭环在座架坐标系(测量坐标系)中的,测角装置测出的也是座架坐标系中的实时天线角度,而引导数据和要求天线输出的数据是大地坐标系(地理坐标系)中的数据。跟踪系统获得目标轨道预报的理论轨道角度是按大地坐标系来计算的,所以跟踪系统就必须对大地坐标系中的理论引导角(大地坐标系中的方位角和俯仰角)通过坐标转换换算到座架坐标系中,得到正确的指向角,从而在座架坐标系中对跟踪系统进行实际的控制计算;同时由于在终端显示的是在大地坐标系中的实际运转情况,所以还必须对座架坐标系中的实时测量轴角进行坐标反变换[3]。
3.5.1 坐标正变换
把目标大地方位角AD、大地俯仰角ED转变为座架Aj和Ej的这种变换称为坐标正变换,坐标正变换公式为:



MR、MP和MH分别为横摇、纵摇和航向转换矩阵[5],在AET座架中横摇(Roll)为0°,纵摇(Pitch)固定为-7°,航向(Heading)为倾斜轴的角度,顺时针为正,则可推出:

将式(3)~式(6)代入式(1)可得:

Aj位于哪个像限由yj和xj的符号来确定:
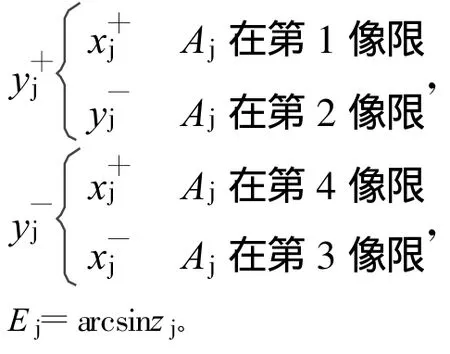
3.5.2 坐标反变换
座架坐标系中的角Aj和Ej转变为与之对应的大地方位角AD和大地俯仰角ED,这种变换称之为坐标反变换,坐标反变换式为:

因为坐标转换矩阵都是正交矩阵,其逆矩阵等于转置矩阵,所以上式可变为:

由上式可以求出AD和ED。
3.6 控制算法
控制算法采用PI控制算法,PI算法为二阶无静差体制,其开环传递函数式为[4]:

式中,K(s)为传递函数;Ka为系统增益;T为采样周期;τ为时间常数期;ξ阻尼系数。
开环对数频率特性曲线如图2所示。通常在离散化的伺服控制系统中采用增量式数字PI控制算法,所谓增量式PI是指数字调节器的输出只是控制量的增量U k_,其表达式为:

式中,Kp为比例放大系数;Ts为采样周期;Ti为积分时间常数为当前增量输出为第k次偏差。

图2 开环对数频率特性曲线
增量式数字PI调节控制技术在自动控制领域应用已相当广泛并越来越完善,近年来的工程都广泛采用这种调节技术,并获得满意的结果。
4 仿真结果分析
大地坐标下的跟踪曲线如图3所示,AET三轴座架坐标下的跟踪曲线如图4所示。

图3 大地坐标下的跟踪曲线

图4 AET坐标下的跟踪曲线
在俯仰角为89.329°时,方位轴速度为4.5(°)/s,小于方位轴能达到的速度(20(°)/s),所以不存在过顶跟踪“盲区”。
在俯仰角为 89.329°时,方位轴速度为49.38(°)/s,远大于方位轴能达到的速度(20(°)/s)所以存在过顶跟踪“盲区”。
5 结束语
基于AET座架伺服控制系统是针对解决天线跟踪过顶“盲区”而设计的,整个系统具有实时性好、系统参数可调和可靠性高的优点。该方法消除了天线跟踪的“盲区”,保证跟踪任务的顺利完成,经过一年多的试运行,实际现场可靠运行验证了该方法的有效性。
[1]王德纯.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[2]张 燕.过顶跟踪的天线座设计方法[J].无线电工程,1997,27(4):37-39.
[3]李小平.天线座过顶跟踪[J].通信与测控,1992(4):95-100.
[4]孙德宝.自动控制原理[M].北京:化学工业出版社.2002.
猜你喜欢
中国慈善家(2022年3期)2022-06-14
导航定位学报(2022年2期)2022-04-11
幼儿园(2021年12期)2021-11-06
文苑(2018年22期)2018-11-19
文苑(2018年18期)2018-11-08
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
小星星·阅读100分(高年级)(2016年11期)2016-09-10
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06