基于神经网络的电极调节内模控制
2011-06-23 09:49郝全田高玉荣
电气技术 2011年11期
郝全田 李 嵩 高玉荣 王 鑫
(1.安阳钢铁股份有限公司,河南 安阳 455004;2.安阳县电业管理公司,河南 安阳 455000;3.安阳供电公司,河南 安阳 455004)
钢包精炼炉是用三相电极产生电弧加热钢液,使钢液保持在一定温度,以进行相应的精炼反应及操作。电极调节器的调节条件和调节任务颇为复杂,采用先进的控制方法来控制电极升降成为了当前冶金科研工作者们研究的热点[1]。
神经元网络是一门新兴的交叉学科,源于对人脑神经系统的模拟。它是大量简单的处理单元广泛连接所组成的复杂网络,用以模拟人类大脑神经网络结构和行为。内模控制是一种基于过程数学模型进行控制器设计的新型控制策略[4],其设计简单、控制性能好和在系统分析方面的优越性,内模控制和许多其它控制方式相结合使内模控制不断得到改进并广泛应用于工程实践中,取得了良好的效果。
本研究项目针对精炼过程的工艺参数和工艺过程,对精炼炉三相电极控制系统的高度非线性和难以建立精确数学模型的问题,运用人工智能—神经网络技术,建立了基于BP神经网络电极调节内模控制方法。
1 基于神经网络电极调节对象模型建立
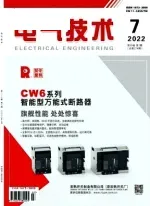
本研究项目将驱动电极升降的液压传动系统及电极系统视作一个广义对象,采用神经网络对广义对象进行辨识。在系统运行中,神经网络辨识器(NNM)实时在线从广义对象的输入和输出数据去学习、训练自身的权值和阈值,以实现对广义对象的非线性映射。同时,根据其记忆和当前输入信号进一步预测电弧电流将出现的变化,提前发出控制信号,减少或避免炉况变化造成的影响。电极调节对象建模原理既神经网络辨识器的原理如图1所示。
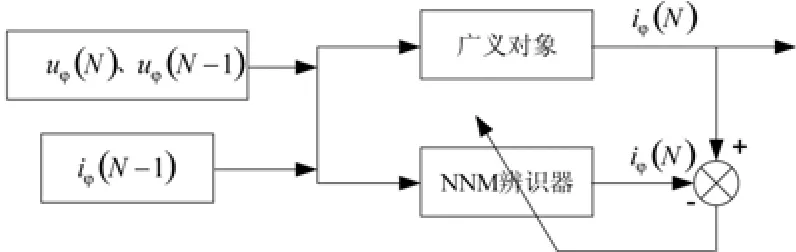
图1 辨识器原理图
图1中的变量含义如下:u为电极控制器的输出量;i为电弧的电流;^i为电弧的预估电流,φ为三相(φ=A、B、C);N为时间片N,其上一个时间片为N-1,下一个时间片N+1,以此类推,“一个时间片”是指电极控制器的一个周期。
神经网络种类繁多,BP网络可以在任意希望的精度上实现任意的连续函数,实现从输入到输出的任意非线性映射,因采用的是全局逼近的方法,故有较好的泛化能力[3];因此,在本文的控制对象中,选择了BP神经网络来对电极调节对象进行建模。
此次动态模型参数选取:控制器当前输出、前一时刻控制器的输出、前一时刻电弧电流值,三个状态量共9个参数作为输入;预估电流值作为输出。BP网络由一个输入层、一个隐含层、一个输出层组成三层网络结构。隐含层单元数的确定没有一个明确的表达式,在确定时可以参考一些定性结论根据,经多次实验隐含层单元数确定为12个。三相电极调节系统辨识器模型如图2所示。
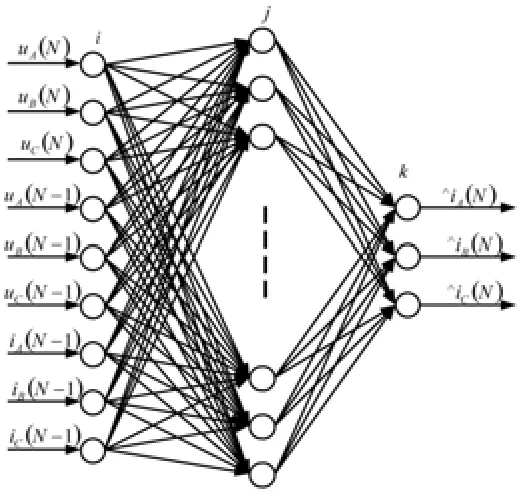
图2 神经网络辨识器模型
图2中各变量含义与图1变量含义相同。
隐含层有12个神经元(j=1,2,...,12),隐含层各神经元的输入函数为

隐含层神经元节点函数为非对称型Sigmoid函数

输出层有三个神经元(k=1,2,3),其网络的神经元输入函数为

输出层神经元节点函数采取线性函数

BP网络的训练条件是除需提供足够的输入训练样本外,还要有合理的与输入样本对应的输出目标值,即输入与输出之间客观地存在着用解析方法难以描述的非线性映射关系,而网络离线训练的目的就是要找到合适的网络权值Wij和Wjk以满足这种映射关系。对于本系统的 BP网络训练来说,首先就要找到输入样本uφ(N)、uφ(N -1)、iφ(N-1),与输出样本^iφ(N)的映射域,这可以在现场实测取得数据。一部分用来利用网络本身的功能找到输出、输入的映射关系,这也就是网络训练的第一步,另外一部分数据用来模型验证。
在离线建立了神经网络以后,我们可以根据取得的权值和阈值,作为对象模型进行在线学习的初始权值和阈值,BP网络经过在线学习可以达到更好的效果。
2 精炼炉电极调节内模控制
BP神经网络可以完成从一个空间到另一个空间的非线性映射,理论上已经证明一个三层的前馈型网络可以实现任意非线性函数的映射。而内模控制系统的实现,关键在于寻找对象的正向模型和逆向模型。由此表明基于人工神经网络来设计内模控制器,可以控制含有大量不确定因素或未知因素的非线性系统。即对于一个非线性系统,一定存在一个合适的BP网络,利用它可以辨识出对象的模型;并且在对象逆模型存在的情况下,总能够找到一个规模合适的BP网络,用它构造出系统的逆模型,这就是神经网络在非线性系统控制中的辨识与控制。
2.1 系统的构成
电极调节内模控制的结构如图3所示,广义对象代表精炼炉的电极调节系统,包括液压传动机构、电弧部分以及检测环节等。系统运行时,如果系统的内部模型 NNM与被控对象没有模型误差,则系统相当于开环控制,说明内部模型准确逼近对象模型。这时只要逆模型也准确,系统将实现对象输出跟踪指令输入。如果内部模型 NNM与被控对象存在模型误差,则将模型失配的信息和扰动量作为反馈量,而一般反馈系统反馈的是系统的输出量[2]。
由于引入内部模型NNM,与一般反馈控制系统相比,反馈量由原来的输出量反馈变为扰动量反馈,从而突出了扰动量,使控制器的设计变得较为容易。当模型NNM与对象匹配时,反馈误差为零,这相当于系统开环。当模型与对象失配时,即实际电流与网络的输出电流不相等时,在反馈回去的信息中,除原来的扰动量外,还包含模型失配的某些信息,从而有利于控制系统的抗扰设计,增强了系统的鲁棒性[5]。
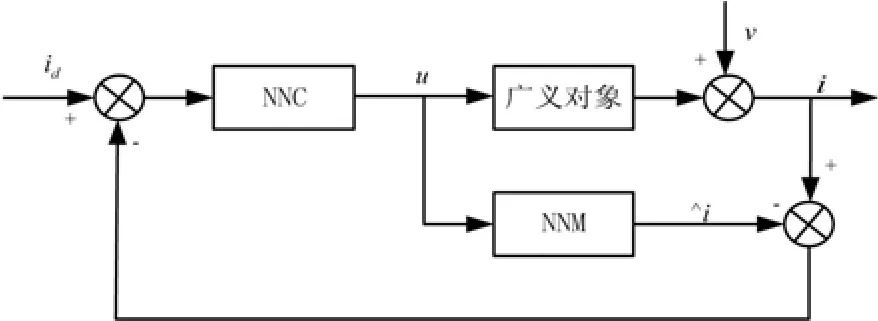
图3 电极调节内模控制系统框图
图3中的变量含义如下:NNM:神经网络辨识器,即广义对象的正向模型;NNC:神经网络内模控制器,即广义对象的逆模型;id:电流给定值;^i:神经网络辨识器的输出电流值;i:被检测到的实际电流值。
系统要实现电流的跟踪,需要以下几个步骤:
1)利用神经网络和采集的数据建立系统内部模型NNM(正模型)与控制器NNC(逆模型),正模型用来逼近对象模型,逆模型作为内模控制器。
2)设计、调整控制器参数,使系统达到控制目标。
2.2 逆向模型的建立与训练
电极调节逆模型的建立与正模型的建立没有太大的差别,电极调节神经网络逆模型如图4所示。
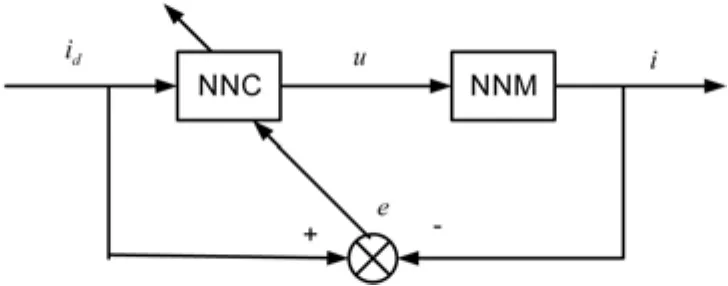
图4 电极调节神经网络逆向建模
逆模型训练步骤:
步骤1:首先离线训练NNM。
步骤2:采样得到 i(N)、 u(N)。
步骤 3:将id、 i(N-1)、u(N-1)输入神经网络控制器得到 u(N)。
步骤4:将 u(N)输入对象及神经网络模型得到偏差 e(N)。
步骤5:用相应的算法修证逆模型的权值和阈值。
步骤6:返回步骤2,继续进行。
建立逆模型的公式如下:

三层BP神经网络,输入层神经元7个,隐含层神经元12个,输出层神经元3个。
从现场选取的前150组数据进行,进行单点样本训练。在实际应用中,可以在一段时间内训练一次网络作为此时段的逆模型。
在网络训练成功后记录下权值及其阈值,根据这些权值和阈值我们就可以建立神经网络内模控制器模型。
在神经网络辨识器NNM、神经网络内模控制器NNC模型训练好后,基于内模控制的精炼炉电极调节系统即搭建起来了。
3 系统仿真
为检验内模控制应用到精炼炉电极调节系统的控制结果,需要一个被控对象模型G代替实际精炼炉电极调节系统,来进行仿真。建立精确的被控对象模型传递函数表达式并不容易,考虑采用神经网络离线辩识对象模型G’,G’作为实际被控对象G的一部分。
由现场采集的数据控制量 u(电极升降速度)与电流增量Δi作为神经网络的输入输出,建立控制量u与电流增量Δi之间的关系,即

被控对象G实际上是我们进行建模的神经网络G’与前一时刻电流值之和。则电流应该为

当被控对象模型建立起来后,在加入阶跃信号后,突加入一个幅值为 800A的电流干扰,神经网络内模控制扰动输入曲线如图5所示,神经网络内模控制阶跃扰动响应曲线如图6所示。从图5、图6可以看出,内模控制经过自适应学习后,超调量小,系统达到稳态的调节时间短,控制电流精度高,可以有效的抑制扰动,特别对于精炼炉电极调节系统这种大滞后非线性系统具有很强的鲁棒性。
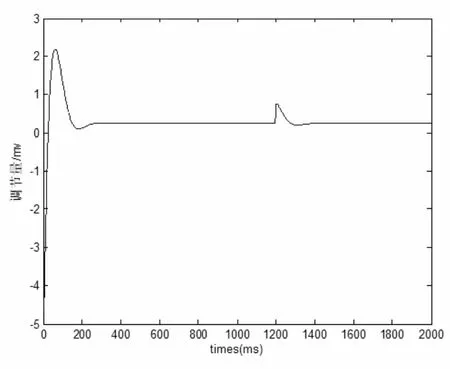
图5 神经网络内模控制扰动输入曲线
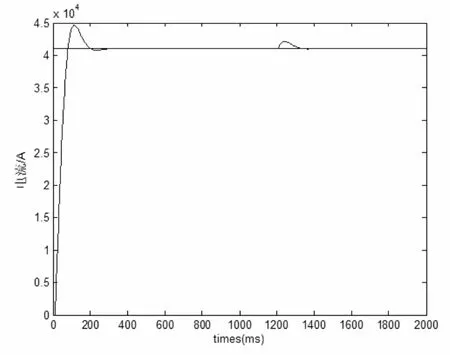
图6 神经网络内模控制阶跃响应曲线
4 结论
本文为解决系统数学模型难以确定的问题引入神经网络,辨识出系统正、逆模型。辨识过程中由穷举法确定网络的隐层结点数,由大量的仿真实验确定网络的输入层和输出层。其中,逆模型的训练用到的正是逆系统思想,根据逆系统的原理用间接法离线训练得到系统的逆模型,即内模控制器。然后采用内模控制,通过对精炼炉电极调节系统的研究,得出以下结论:
1)本文所设计的智能建模及其控制策略对大量的、复杂的难以建模或根本无法建模的生产过程或对象进行有效控制,提供了理论支持和可能。
2)采用常规控制理论对复杂过程解耦控制,必须首先建立准确的数学模型,而在难以获得准确数学模型的情况下,采用神经网络解耦是可行的。
3)对于像精炼炉电弧电流变化极快的这一类过程或对象实时在线建模,需要一个高速数据采集系统,因为只有采集更多反映对象特性快速变化的输入输出数据,才能提高对象的实时在线辨识效果。
[1]马竹梧等.钢铁工业自动化(炼钢卷)[M].北京:冶金工业出版社,2008.
[2]张绍德.钢包精炼炉的电极系统智能建模及控制[J].北京科技大学学报2004,26(1)182-185.
[3]张建民,王涛,王忠礼.智能控制原理及应用[M].北京:冶金工业出版社,2003.
[4]周涌,陈庆伟,胡维礼.内模控制研究的新发展[J].控制理论与应用,2004,3(21):475-482.
[5]William E S,Norman G B.Neural network control system for electric arc furnaces[J].MPT,1995,18(2):58-62.
猜你喜欢
山西冶金(2022年4期)2022-09-26
材料与冶金学报(2022年2期)2022-08-10
山东冶金(2022年3期)2022-07-19
成都信息工程大学学报(2021年6期)2021-02-12
中国资源综合利用(2016年4期)2016-01-22
大型铸锻件(2015年1期)2016-01-12
广州大学学报(自然科学版)(2015年4期)2015-12-23
电源技术(2015年2期)2015-08-22
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09