
模糊目标轮廓图像分割研究
2011-09-19 08:41高俊钗
电子设计工程 2011年13期
高俊钗,韩 冰
(1.西安工业大学 电子信息工程学院,陕西 西安 710032;2.西安工业大学 信息技术中心,陕西 西安 710032)
由于图像传感器件的特性和光学衍射效应的滤波特性,由相机采集的图像存在一定程度的模糊,目标边缘轮廓与背景之间也存在一定程度的过渡变化,所以背景与目标边缘之间的信号变化不是阶跃变化,而是呈斜坡的过渡[1]。过渡区的存在造成了目标轮廓的模糊,是目标真实边界分割的主要障碍。过渡区部分属于背景区域,部分属于目标区域,也造成了目标区域与背景区域灰度存在重叠。
目前轮廓图像分割算法一般是基于梯度局部极大值来实现的,但这种算法获得的是否是真实的轮廓,没有可靠的分析与说明。
笔者利用清晰的轮廓图形进行实验分析,采用平滑滤波器模拟相机采集图像的滤波特性,对基于梯度的几种算子:sobel算子、canny算子进行了比较,并提出了提取真实轮廓的图像边缘检测算法。
1 采集图像的边缘特性分析
边缘是图像最基本的特征,与图像亮度或图像亮度的一阶导数的不连续性有关,从而表现为阶跃边缘和线条边缘,这里主要关注阶跃边缘,如图1(a)所示。
在实际图像中,由于图像传感器的特性和光学衍射效应等影响,阶跃边缘变成斜坡形边缘,如图1(b)所示。
阶跃边缘表现为图像亮度在不连续处两边的像素灰度值有着明显的差异,这种差异从视觉上表现为图像从亮场景过渡到暗背景,或从亮背景过渡到暗场景。所以图像亮度的一阶导数的幅度在阶跃边缘上非常大,而在非边缘上为零,如图 1(c)所示。
斜坡边缘上的图像亮度一阶导数的幅值最大,在非边缘点幅值减小,如图 1(d)所示。

图1 图像边缘截面图及其一阶导数Fig.1 Image edge sections and the first derivative
2 边缘检测的原理
2.1 梯度检测原理
边缘是指图像局部亮度变化最显著的部分,通常与图像亮度的一阶导数的不连续性有关,是背景与目标之间的边界点集。这种不连续可利用导数方便地检测到,一般常用一阶来检测边缘,一阶导数即梯度[2-3]。二维图像 的梯度定义为向量:
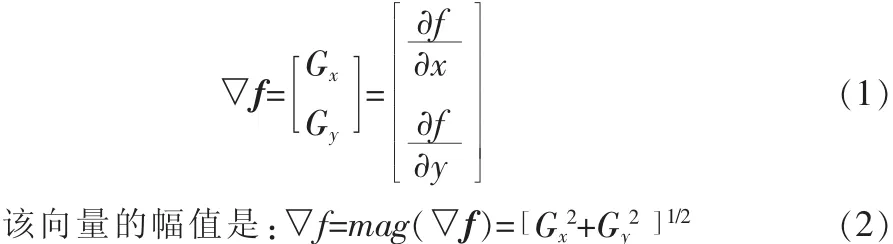
为简化计算,该数值有时通过省略平方根的计算来近似,或通过取绝对值来近似,这些近似值仍然具有导数性质,即在不变亮度区中的值为零,与可变亮度区的亮度变化程度成比例。
梯度向量的基本性质是它指向f在(x,y)处的最大变化率方向。最大变化率出现时的角度为:

2.2 边缘检测算子
图像导数可借助空域微分算子通过卷积来完成。实际上对于离散的、数字化的图像,求导数是利用差分近似微分来完成[4-5]。基于不同的算子近似形成了不同的边缘检测器,常用的边缘检测的方法,一阶导数近似的有Sobel算子、Canny算子[6]等,由这些边缘检测器生成的边缘集可以分成两个子集:真边缘集和假边缘集。真边缘集对应场景中的边缘,假边缘集不是场景中的边缘。还有一个边缘子集,即场景中漏检的边缘集。边缘检测[7]对噪声(即目标内部和背景内部的变化也比较敏感),虽然真边缘集对边界定位较准确,但会出现漏检边缘集和假边缘集。
3 基于梯度的边缘检测算法比较
3.1 原始图像合成
为了说明图像轮廓模糊对检测的边缘的影响,给出一幅人工合成图像,其背景和目标的灰度范围分别是单一灰度图像,背景的灰度为 0.5,目标的灰度为 0.75,如图 2(a)所示,轮廓比较清晰。采用一13×13的均值滤波器对人工合成图像进行滤波,模拟相机滤波采集的图像,如图2(b)所示。可以看出,轮廓有一定程度的模糊。
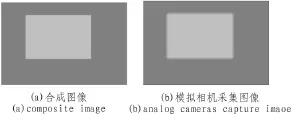
图2 原始图像Fig.2 Original image
3.2 边缘检测处理比较
分别采用Sobel算子和Canny算子对合成图像和模拟相机采集图像进行边缘检测,Sobel算子检测的结果如图3所示,图3(a)是对合成图像检测的结果,图3(b)是对模拟相机采集图像检测的结果。Canny算子检测的结果如图4所示,图4(a)是对合成图像检测的结果,不同算子处理的结果基本相同。图4(b)是对模拟相机采集图像检测的结果。通过比较可以看出,轮廓的模糊对边缘检测有很大的影响,而且不同的算子处理结果会有所差异,Sobel算子处理的结果出现了多边缘,而Canny算子处理的结果角点部分变得圆滑。

图3 Sobel算子边缘检测Fig.3 Edge detection of Sobel operator

图4 Canny算子边缘检测Fig.4 Edge detection of Canny operator
4 基于灰度乘方的梯度边缘检测算法
由于轮廓的模糊性,以至于不能很好地检测目标的边缘。轮廓的模糊性是相机成像滤波造成的。而滤波在一定意义上可看作图像平滑的特殊情况,平滑的实质是灰度内插,所以过度平滑会对图像产生不良影响,原始图像逐渐模糊,尤其表现在高频的边缘部分。如果过度平滑会在图像区域边缘产生较严重的几何畸变,如图2(b)所示,其相应的分割结果也逐渐变差,如图 3(b)和 4(b)所示。
然而在图像边缘产生几何畸变(模糊)的过程就是产生过渡区的过程,边缘存在于过渡区内,而过渡区本身就在消除灰度变化之间的差异,所以前面梯度算子不能较好地检测模糊轮廓。要较好地检测模糊轮廓边缘,就需要做与滤波平滑相反的运算,提高过渡区的灰度变化差异性。由于相机的平滑滤波是不可估计的,所以设计有助于提高过渡区灰度变化差异性的算法都是可行的。因此提出了改进的梯度边缘检测算法,其主要步骤如下:
1)图像灰度乘方运算,提高图像灰度变化的差异性;
2)对乘方后的图像归一化处理[8],提高图像的动态范围;
3)对归一化图像采用梯度算子进行边缘检测。
按照以上步骤,对模拟相机采集图像进行处理如图5所示,其中,图5(a)为灰度乘方运算处理的归一化图像,与图2(b)进行比较,提高了边缘的清晰度。图5(b)为本文算法处理的边缘检测图像,与合成图像直接采用梯度算子检测的结果一致,达到了对模糊轮廓的真实边缘检测的效果。
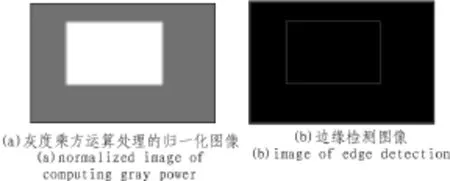
图5 灰度乘方算法边缘检测Fig.5 Edge detection algorithm of gray-scale power
5 结 论
图像灰度乘方处理可以提高图像灰度变化的差异性,从而提高了图像模糊轮廓区域即过渡区域灰度变化的差异性,相应减小了相机采集过程带来的图像轮廓模糊。通过实验仿真分析,基于自乘处理的图像的梯度边缘效果较好,检测到了与清晰轮廓一致的边缘轮廓,是一种有效的模糊轮廓检测算法。
[1]张广军.视觉测量[M].北京:科学出版社,2008.
[2]曹建农,孙承志.图像分割中区域灰度重叠问题研究[J].计算机应用,2006,26(9):2077-2080.
CAO Jian-nong,SUN Cheng-zhi.Study on the overlap of regional intensity ranges in image segmentation[J].Computer Applications,2006,26(9):2077-2080.
[3]冈萨雷斯.数字图像处理[M].北京:电子工业出版社,2009.
[4]章毓晋.图像工程[M].北京:清华大学出版社,2005.
[5]闫成新,桑农,张天序.基于小波变换的图像过渡区提取与分割[J].计算机工程与应用,2004(18):29-31.
YAN Cheng-xin,SANG Nong,ZHANG Tian-xu.Wavelet transform based image transition region extraction and segmentation[J].Computer Engineering and Applications,2004(18):29-31.
[6]乐宁,梁学军,翁世修.图像过渡区算法及其改进[J].红外与毫米波学报,2001,20(3):211-214.
LE Ning,LIANG Xue-jun,WENG Shi-xiu.The algorithm of image transition region and its improvement[J].Infrared Milim.Waves,2001,20(3):211-214.
[7]宗露艳,吴陈.一种改进的Canny算子边缘检测算法[J].现代电子技术,2011(04):104-106.
ZONG Lu-yan,WU Chen.An Improved Edge Detection Algorithm Based on Canny Operator[J].Modern Electronics Technique,2011(04):104-106.
[8]杨通钰,彭国华.基于NCC的图像匹配快速算法[J].现代电子技术,2010(22):107-109.
YANG Tong-yu,PENG Guo-hua.Fast algorithm for image matchingbasedonNCC[J].ModernElectronicsTechnique,2010(22):107-109.
猜你喜欢
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
摄影之友(影像视觉)(2019年3期)2019-03-30
中国交通信息化(2017年4期)2017-06-06
小天使·六年级语数英综合(2017年5期)2017-05-27
数学大世界·中旬刊(2017年3期)2017-05-14
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17
高中生学习·高三版(2016年9期)2016-05-14
