一种非线性PID控制器建模与仿真
2011-09-29 08:48厉兆慧
时代农机 2011年6期
厉兆慧,夏 洪
(东华理工大学 机械与电子工程学院,江西 抚州 344000)
由于PID控制器的简单、有效以及不依赖于被控对象数学模型的特点,PID控制技术在控制实践中的应用越来越广泛。但是,传统线性PID控制中,比例、积分和微分环节之间为线性组合,容易造成系统静态与动态性能、跟踪设定值与抑制扰动之间的矛盾。因此,有必要利用非线性特性来改造传统的PID控制器,以获得更高的控制性能。
本文通过分析PID各系数随系统误差信号的变化关系,分别给出了比例、积分和微分增益系数关于误差信号的连续非线性函数。然后,用这3个函数代替传统PID控制器的3个增益系数,从而获得非线性PID控制器的可用模型。
通过对二阶系统的数据仿真可以得出,非线性PID控制器可以改善传统PID控制器在快速性和稳定性方面的缺陷,并且所设计的非线性PID控制器能大大降低系统阶跃响应的上升时间,同时也证明了这类非线性PID控制器的有效性。
1 传统的PID控制器
PID控制器具有简单的控制结构,在实际应用中又较易于整定,因此它在工业过程控制中有着最广泛的应用,大多数PID控制器是现场调节的,现在有很多不同类型的调节率,利用这些调节率,可以对PID控制器进行精确而细致的现场调节。
PID控制器的数学模型

其中,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,Ki为积分系数,Kd为微分系数,其中。
因此,PID控制器的设计就是确定PID控制器的3个参数,采用Ziegler-Nichols整定法则,通过实验方法确定临界增益和相应的周期,则PID控制器的参数计算公式为

对于简单的PID控制器,上述参数一经整定,在整个过程中便要一直保持不变。这样的控制器很难同时满足跟踪设定值和抑制扰动的要求,也无法适应过程特性的变化,而且传统PID控制器中的线性组合常引起系统快速性与超调量之间的矛盾。
2 非线性PID控制器
要建立非线性PID控制器模型,最常用的方法是通过调整传统PID控制器的系数Kp,Kd和来建立模型,而修改PID控制器系数最主要的方法还是根据系统输出误差e的大小来生成函数Kp(e(t)),Ki(e(t))和 Kd(e(t)),然后以这三个非线性函数来代替传统PID控制器的系数。下面,可以通过分析系统的阶跃响应曲线(见图1)来构建非线性PID控制器的各环节的增益系数,从而获得非线性PID控制器的可用模型。
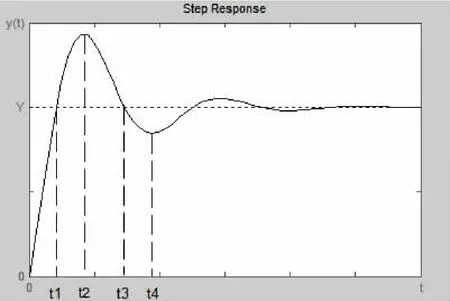
图1 一般系统的阶跃响应曲线
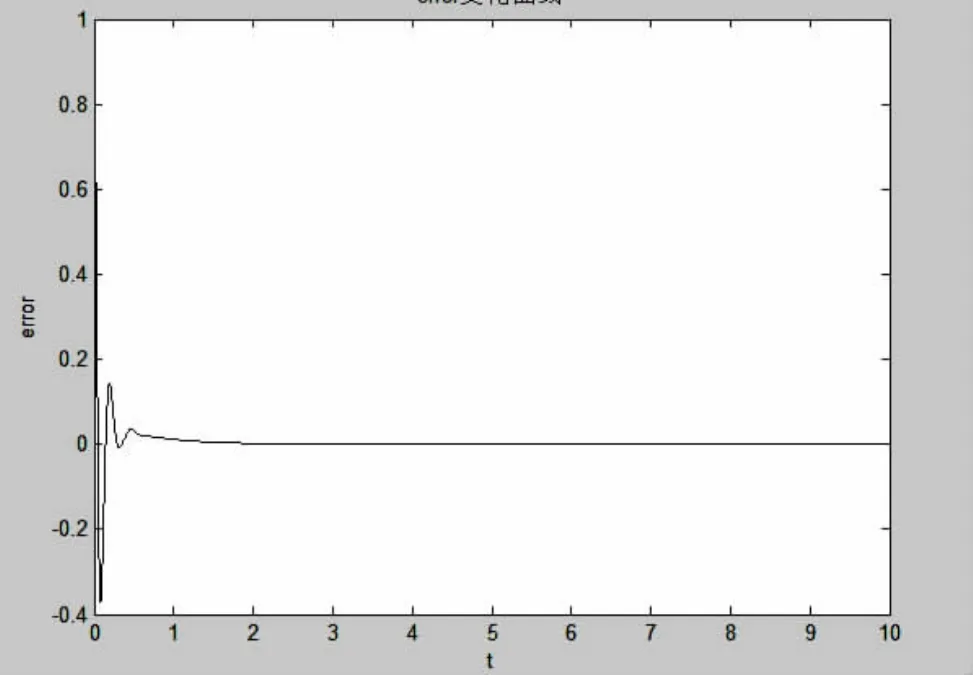
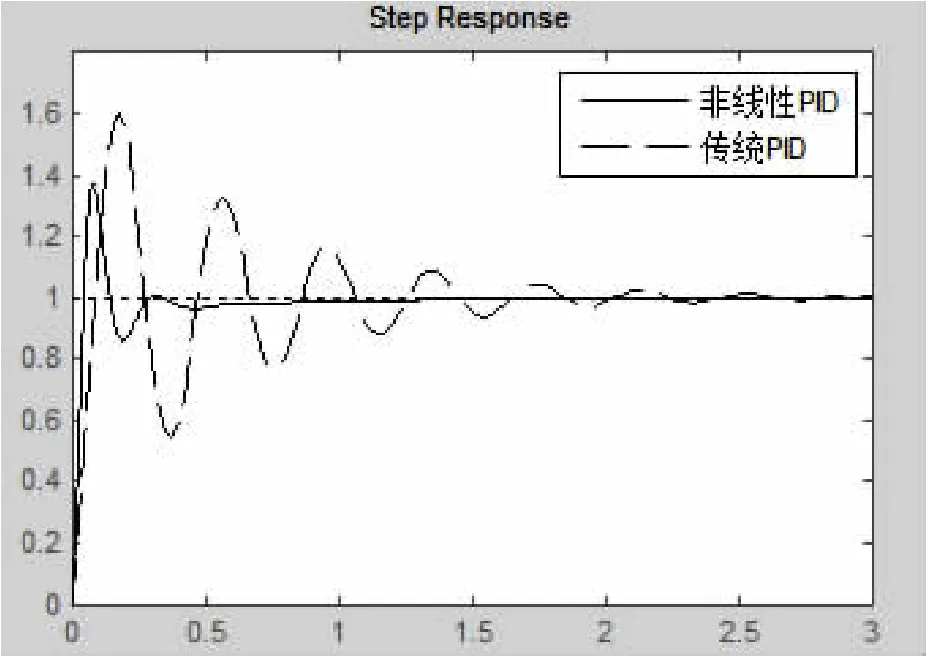
(1)比例系数Kp。比例系数的作用是能够提高系统响应速度,减小超调。想要达到既快速又稳定调节的目的,就必须在远离稳定值时,比例系数的绝对值应该大,而在稳定值附近时,比例系数的绝对值又应该很小。所以,在响应时间段0≤t≤t1,在初始时应该比较大,为了减小超调量,希望Kp随着误差e的减小而减小,在时间段t1 式中:ap,bp,cp为正实常数。 当 e→±∞ 时,取最大值 ap+bp,当e=0时,Kp取最小值ap,cp控制Kp的变化速率。 (2)积分系数Ki。积分环节的作用是消除系统的静态误差,如果积分系数过大会使系统的过渡过程变长。所以,当误差信号较大时,希望Ki较小,以防止系统产生震荡,有利于减小超调量;而当误差较小时,希望Ki增大,以尽快消除系统的静态误差。即Ki绝对值与e(t)绝对值变化方向相反。由此,可以得出积分系数Ki可表示为:Kie(t))=aisech(bie(t)) 式中:ai,bi为正实常数; 当 e→±∞ 时,Ki取最小值 0,当e=0时,取最大值ap;bi的决定了Ki的变化速度。 (3)微分系数Kd。微分环节可以抑制超调量,增加系统阻尼,能起到提前校正系统的作用,但是会使系统的响应速度变慢。在0≤t≤t1时间段,Kd应逐渐由小变大,这样就可以在不影响系统响应速度的前提下,抑制超调的产生;在t1 式中:ad,bd,cd,dd为正实常数; 当 e→-∞ 时,Ki取最大值ad+bd,当 e→+∞ 时,取最小值 ad,当 e=0 时,Ki取值为 ad+bd/(1+cd);dd决定了积分系数 Kd的变化速率。 由以上分析可知,如果非线性函数中的各项参数选择合适的话,能够使控制系统达到响应速度快,并无超调量的目的。由于非线性PID控制器中的各项增益系数能够随误差e的变化而变化,因此其鲁棒性也比传统的PID控制器强。 (4)非线性PID控制模型。在得出上面各模块的非线性函数Kp(e(t)),Ki(e(t)),Kd(e(t))之后,也就同时得出了非线性PID控制器的模型,即u(t)=[ap+bp(1-sech(cpe(t)))]e(t)+[aisech(bie(t))] 式中:ap,bp,cp,ai,bi,ad,bd,cd,dd均为正实常数。 为了验证非线性PID控制器的有效性,利用MATLAB分别对传统PID和非线性PID的单位阶跃响应进行了数值仿真,被控对象为典型的二阶系统,其传递函数为: 采用传统的Ziegler-Nichols规则整定固定增益的传统PID控制系数为:Ti=0.1,Td=0.025。 非线性PID控制器模型中的信号误差e随时间变化曲线如图2所示,非线性增益系数Kp,Ki,Kd随误差信号e的变化曲线如图3所示: 图2 误差e随时间变化曲线 图3 非线性系数随误差变化曲线 从图 3可以看出 Kp,Ki,Kd的变化规律符合 PID控制原理,所以具有很好的仿真效果。在上述系数条件下,传统PID控制器与非线性PID控制器的单位阶跃响应如图4所示。 图4 非线性PID与传统PID单位阶跃响应比较图 由图4可见,非线性PID控制器的阶跃响应速度明显优于传统固定增益系数的PID控制器的响应速度,非线性PID控制可以使系统快速稳定地收敛到给定的误差范围内,而传统的PID控制不能稳定地收敛,系统存在大幅度的振荡。可见,非线性PID控制比传统的PID控制有更大的优越性和广泛的适应性,可以应用于非线性系统中。 本文利用一种非线性函数对传统PID控制器进行改造的方法,通过分析传统PID控制系数随系统误差e变化的关系,分别给出了比例、积分和微分增益系数关于误差信号的二次非线性函数,得到了比较灵活的增益策略,大大简化了3个增益系数的非线性函数模型。通过对二阶系统的阶跃响应仿真可以看出,所提出的非线性PID控制器比传统固定增益的PID控制器具有更好的动静态性能,并且对于某些被控对象具有比传统PID更好的调节性能及更大的稳定域。上述算法简单容易且实现,因此具有较高的实际应用价值。但是,如果从理论上分析其具体的适用范围、参数整定规则等,有待于进一步的深入研究。 [1]郭彦青,姚竹亭,王楠.非线性PID控制器研究[J].中北大学学报,2006,27(5),423-425. [2]苏玉鑫,段宝岩.一种新型非线性PID 控制器[J].控制与决策,2003,18(1):126-128. [3]Wang Q G,Lee T H,Fung H W.PID tuning for improved perfor mance[J].IEEE Transactions on Control Systems Technology,1999,7(4):457-465. [4]刘金琨.先进PID 控制及其MATLAB仿真[M].北京:电子工业出版社,2002,11.3 仿真研究


4 结语
猜你喜欢
电子设计工程(2022年15期)2022-08-17北京航空航天大学学报(2021年6期)2021-07-20光通信研究(2020年2期)2020-06-15电子制作(2019年19期)2019-11-23科技创新与应用(2019年17期)2019-06-09电子制作(2018年19期)2018-11-14天津教育·下(2018年9期)2018-07-13电子设计工程(2014年18期)2014-02-27电力自动化设备(2013年11期)2013-09-18电气电子教学学报(2012年1期)2012-10-12