
基于线阵CCD的车轮表面缺陷检测系统的图像预处理研究
2011-11-13 07:58吴海滨夏需堂
巢湖学院学报 2011年3期
吴海滨 夏需堂
(1安徽大学特种电视技术研究中心,安徽 合肥 230088)
(2安徽大学物理与材料科学学院,安徽 合肥 230039)
基于线阵CCD的车轮表面缺陷检测系统的图像预处理研究
吴海滨1夏需堂2
(1安徽大学特种电视技术研究中心,安徽 合肥 230088)
(2安徽大学物理与材料科学学院,安徽 合肥 230039)
介绍了车轮表面缺陷在线检测系统的工作原理和结构组成,对荧光磁粉的激发光谱和发射光谱以及UV(紫外)LED的发光特性进行了分析和研究,重点介绍了缺陷检测系统的数字图像处理和模式识别技术。经过高精度线阵CCD提取的检测图像,通过采用图像增强、平滑去噪、边缘提取以及二值化等方法,可以有效的识别出可疑的缺陷,完成缺陷在线检测系统的识别报警等。
UV LED;缺陷检测;图像处理;模式识别
1 引言
火车以及由此之上发展起来的轻轨、地铁、动车等是未来城市交通和城际交通的重要运力载体,车轮是火车的重要部件,车轮的质量直接关系到运输的安全性。而车轮的表面裂纹等缺陷最容易产生应力集中,扩散速度比较快,是造成行车事故的潜在威胁,这样便对表面检测技术提出了很高要求。
荧光磁探技术是车轮表面裂纹检测中重要的手段之一,然而目前采用的磁探技术尚存在很多不足:目前采用的是高强度紫外辐射光源,由400-w金属卤灯泡提供高强度的紫外输出,在对人体有害的UVB(中波紫外)波段,此类光源存在较强的辐射峰(如在313nm等),尽管现有紫外灯配置了双滤色系统,但截止深度并不能达100%(一般在2~5%左右),也就意味着尚有部分有害紫外辐射溢出;紫外光源由一盏灯泡发出,自然造成均匀性不够,以现在所用的进口UV-400为例:中心紫外强度为6,500 μW/cm2,边缘则为 2,000 μW/cm2,相差3倍多;由于受人生理条件的限制,如:长时间工作造成注意力不集中、谈话或接听电话时产生的“听盲”、高度紧张产生幻觉等等,即使操作工人责任心再强,要想只依靠人工就做到100%无漏检是很难的,而检测工人的实际效能并没有得到实时监督验证,缺陷产品一旦出厂再信息返回则为时已晚。
为了实现现场安全保障条件,让检测工人能安心地坚守工作岗位,并采用高科技手段辅助进行缺陷检测,起到人工检测效能实时监督验证与制约的作用,所以我们提出了基于线阵CCD的荧光磁粉表面缺陷监测系统正是目的所在。
2 系统工作原理与结构组成
2.1 系统工作原理
将整个车轮磁化后,磁力线在有表面缺陷的位置会发生变化,部分磁感应线会溢出,在缺陷位置会形成磁极,从而产生漏磁场,当在车轮表面喷洒荧光磁粉悬浊液时,会被吸附在漏磁场处形成磁痕。然后在紫外LED的照射下,荧光磁粉将受激发出荧光,通过高速线阵CCD对车轮表面进行摄像,再经计算机进行相关图像处理后,对可疑缺陷进行增强显示同时声光报警对整体和局部图像进行回显放大、打印可疑缺陷图像、建立图像裂纹数据库,从而达到改善工作环境、避免错检、漏检的目的。
2.2 系统结构组成
本系统由车轮旋转控制平台、三套高像素线阵CCD成像系统(LED紫外激发光源)、三台图像处理工控机及一台管理控制主机等组成,如图1所示:
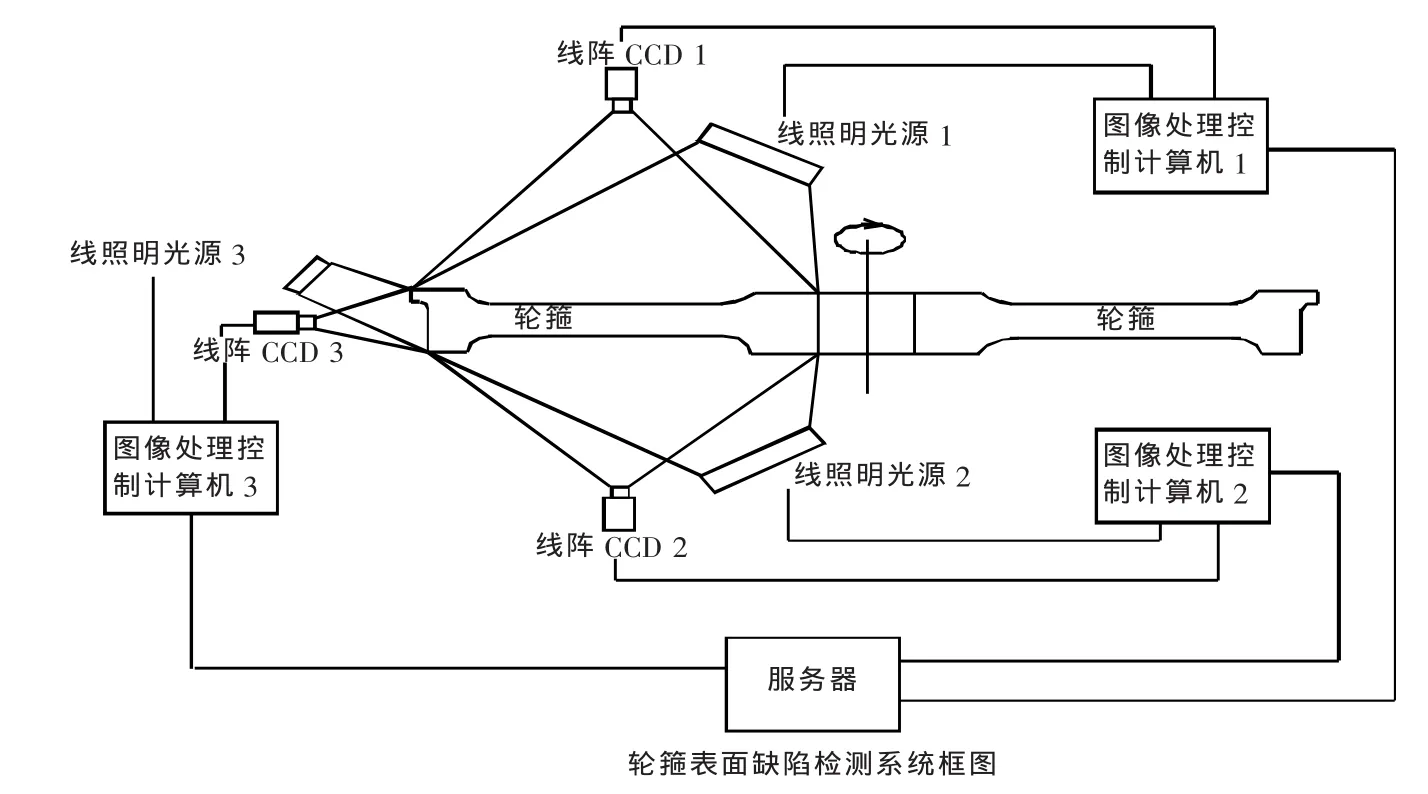
图1 系统架构图
系统分为现场摄像和后图像处理与显示两部分。现场摄像部分位于暗室内,包括:紫外LED、线阵CCD、机械旋转设备等;后图像处理与显示部分可放置于控制室内,包括:千兆以太网卡、图像处理与显示系统、打印机等。为了避免暗室内各种光源的相互干扰,达到获取最佳原始采集图像的目的,我们对紫外LED和磁粉受激光谱以及线阵CCD的工作波段进行了相关的分析研究。
2.3 紫外LED的特性
本系统要求光源是纯紫外光源,尽量过滤可见光,避免其对车轮表面的照射。因为可见光照射车轮表面时会形成反射,与荧光磁粉激发的可见光重叠,导致亮场背景的干扰,容易造成误判现象。考虑到紫外LED的光谱特性,系统在LED前加了一块滤波片。LED的光谱和滤波片的光谱如图2和图3所示:

图2 紫外LED光谱

图3 滤波片透过率曲线
经过滤波片过滤后,对波长小于350nm有害紫外光及波长大于390nm的可见光进行了有效的滤除,滤波片的峰值在360nm左右,对峰值波长为368nm的紫外LED光源具有很好的透过率,满足对光源的要求。
2.4 荧光磁粉的特性
我们在探伤系统中采用了ZnS∶Zn,Pb荧光磁粉,该荧光磁粉的激发光谱峰值在360nm左右(如图4所示),正好与紫外LED的峰值波长邻近,可以很好的对荧光磁粉进行激发。荧光磁粉的发射光光谱峰值波长在530nm左右(如图5所示),这与线阵CCD的成像波长370——600nm也完全吻合。

图4 激发光谱

图5 发射光光谱
2.5 线阵CCD的特性
为获取清晰图像,系统采用检测级高像素、高灵敏的线阵CCD相机,该线阵CCD采用千兆以太网的传输方式,线阵列像素为2048个,每个像元的尺寸是14um×14um,线阵列程度为28mm,点对点的传输距离可达100m。另外相机对长波紫外也有较高的响应灵敏度,为避免由此产生的明场干扰,系统在CCD光学镜头前加装了波长为410nm的UV镜,有效的滤除了紫外光的干扰[1]。(图6为CCD光谱响应曲线)

图6 CCD的光谱响应曲线
2.6 机械旋转系统
从图 1可以看出,CCD1、CCD2和 CCD3分别对车轮两侧和塌面进行拍摄,鉴于线阵CCD扫描要求与被扫描对象相对匀速的特性,当车轮到位稳定后,管理机给出旋转启动信号,在角传感器测定车轮达到设定的恒定转速时,管理机向三台图像处理机发出采集指令,三台图像处理机分别对车轮正、反及塌面进行线扫描采集。
3 图像采集与处理系统
本系统有图像处理软件、计算机和声光报警系统组成。把线阵CCD摄像机通过网线连接到计算机的千兆以太网卡上,就可以在计算机上看到车轮的原始图像,软件处理后会使图像背景与缺陷的对比度加强,当计算机识别到缺陷时就会自动声光报警并打印出缺陷图像。
3.1 图像处理与分析
经过线阵CCD采集到的图像往往带有水痕、水迹、刀痕、表面污染和反光等干扰信息,同时加上光源和线阵CCD本身灵敏度的影响,采集到的图像中不可避免的带有一些噪声特性。为了使背景与缺陷的对比度更加明显,凸出可疑缺陷,就必须要对采集到的原始图像进行平滑和去噪等前期处理,保留更真实的缺陷图像,因此我们设计了以下处理步骤:先对图像进行平滑去噪,有效抑制噪声等干扰信息,再对图像进行二值化,最后对经上述处理后的图像进行边缘提取与识别即得到可疑缺陷的图像。
3.2 图像增强
在有些情况下,一幅图像和真实景物或原图像相比差别甚小,察觉不出来或在容许范围之内,但为了便于人或机器对图像的分析和理解,需要加强图像的某些特征,为后续的图像处理奠定基础。文章中我们采用单尺度Retinex算法对原始图像进行增强[2]。Retinex模型中图像 L(x,y)由亮度图像 L(x,y)和反射图像 R(x,y)两部分组成,通过改变亮度图像和反射图像在原始图像中的比例来达到图像增强的目的。由公式

c为尺度变量,c越大,灰度动态范围压缩的越多,c越小,图像锐化的越多。实验表明,对灰度图像,单尺度Retinex算法可以较好的增强。图七左右两边分别为实验室和现场环境下的原始图像。图八左右两边分别是经Retinex增强的实验图像和现场图像。增强后,明显的凸出了图像的目标部分,但同时也引入了部分的噪声使清晰度降低,接下来我们将对噪声进行一定的过滤。
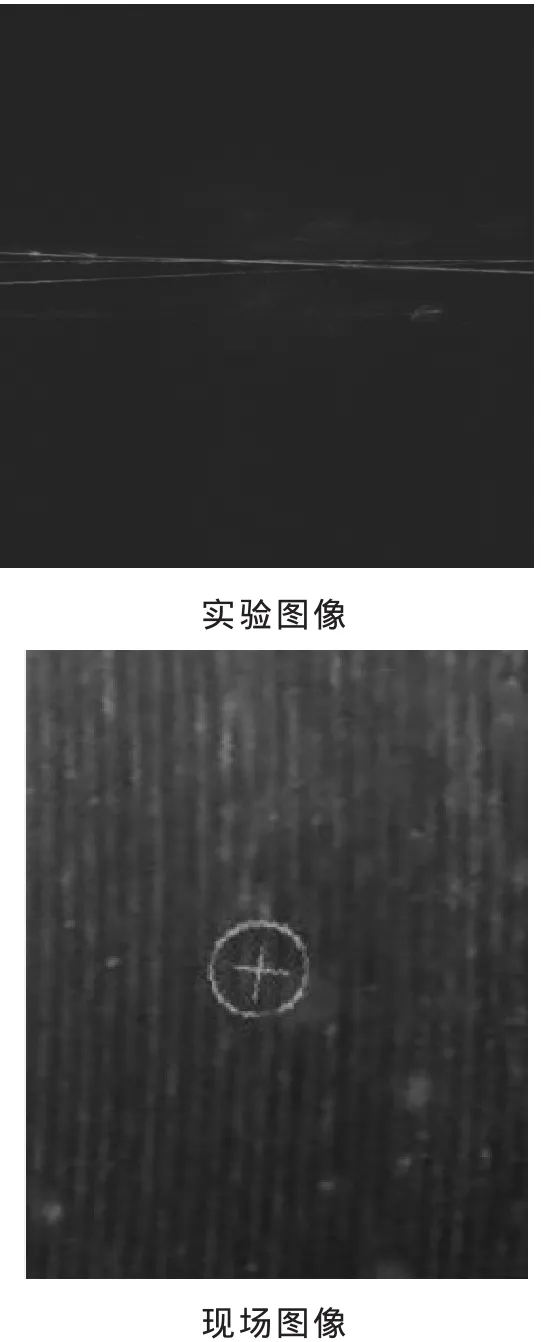
图7 原始图像

图8 Retinex增强后
3.3 平滑去噪
平滑处理的目的是消除或尽量减少噪声和散粒状干扰信息的影响,在噪声和伪缺陷随机分布的条件下,我们采用二维中值滤波对其进行平滑去噪,经验证可以有效的滤除由图像增强及CCD本身所带来的噪声影响。本文采用中值滤波[3]对其进行了去噪处理。
中值滤波是一种典型的非线性滤波方式,它也依靠模板来实现。一个2-D中值滤波器的输出可写为(其中 N(x,y)为(x,y)的邻域,对应模板尺寸):
对一个所用模板尺寸为n×n的中值滤波器,其输出应大于等于模板中(n2-1)/2个像素的值,又应小于等于模板中(n2-1)/2个像素值。图九是中值滤波后的实验图像和原始图像。
3.4 图像二值化
为了将图像的缺陷分离出来,必须对图像进行二值化,二值化的关键是阈值选择,阈值过高会将目标的亮点归为背景,产生漏判;阈值过低会将过多的背景归为目标,产生误判。经平滑后的图像我们采用自动阈值分割可以很好的对图像进行二值化。在系统中我们采用的软件阈值是可以调节的,根据实际取得的图像我们将实验图像的阈值设置为178,高于阈值178的为目标,低于178作为背景;将现场图像的阈值设定为230,这样可以得到如图9所示的清晰的图像。

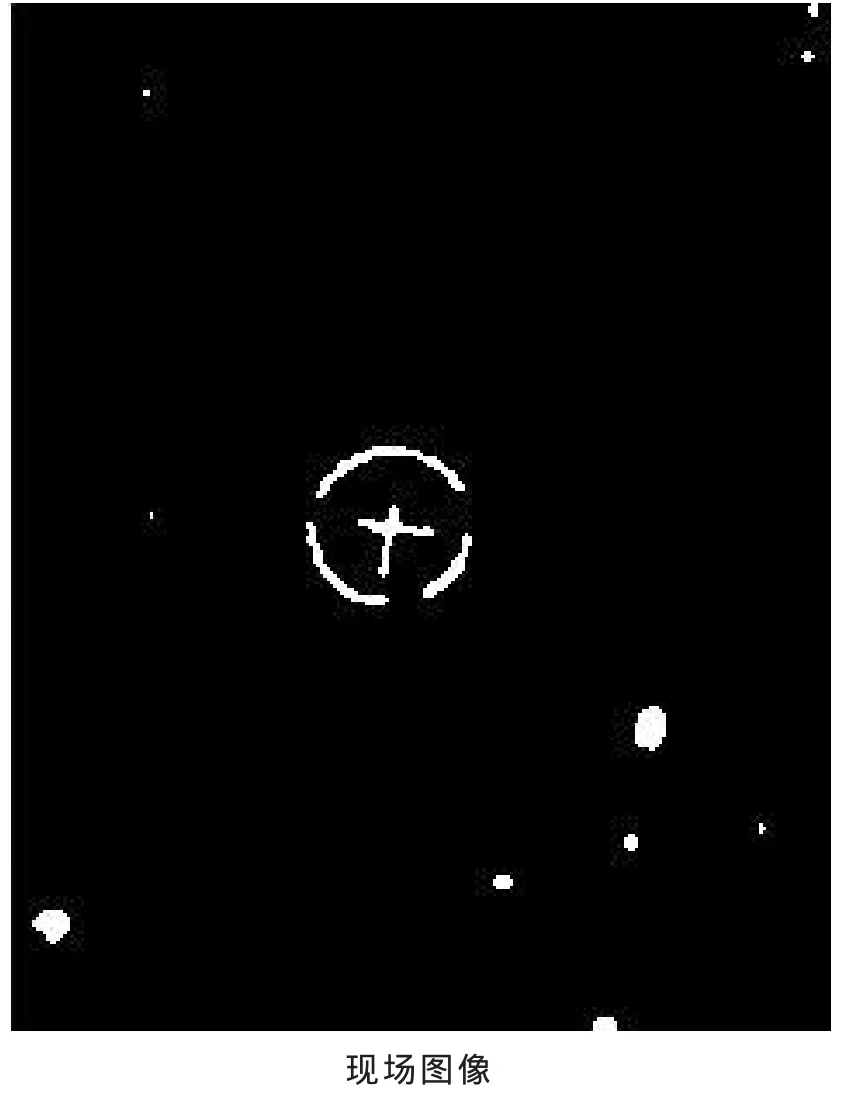
图10 二值化后
3.5 边缘检测与识别
对经过二值化后的图像进行边缘检测,所谓边缘是指图像灰度发生急剧变化的区域。本文中我们采用SUSAN[4](即最小核值相似区域,Smallest Univalue Segment Assimilating Nucleus)算子对图像进行边缘检测。SUSAN边缘检测算法用给定大小的模板对图像中的像素点进行运算以产生初始响应的边缘,再对初始响应边缘进行处理以得到最终的边缘。在数字图像中,圆可以用一个含有37个像素的模板来近似。这37元素排列成 7 行,分别由 3、5、7、7、7、5、3 个像素这相当于一个半径为3.4个像素的圆。如果考虑到计算量,也有用普通的3×3模板来粗略近似的。
设模板为N(x,y),将其依次放在图像中的每个点的位置,在每个位置,将模板内每个像素的灰度值与核的灰度值进行比较:

式中,(x0,y0)是核在图像中位置的坐标;(x,y)是模板 N(x,y)中其他位置;f(x0,y0)和 f(x,y)分别是在(x0,y0)和(x,y)处像素的灰度;T 是一个灰度差的阈值;函数 C(x0,y0;x,y)代表输出的比较结果。

图11 SUSAN算子提取后
如图10所示,我们可以看出SUSAN算子已经很好的提取出了缺陷的信息,为后续的模式识别提供了保证。但经过预处理之后的图像可能有一定误判,通过识别可以把不同的缺陷表示出来,然后对面积较小的、长度较短线条视作干扰信号,对此可以设定一个阈值,将面积、长度小于这一阈值的去掉,对剩下的缺陷进行特征提取和聚类识别,最后得到识别结果,在界面的报告区域打印输出。由于实验条件和技术手段的限制,
对图像的识别与实际可能会出现一定的偏差。
4 结论
由线阵CCD、计算机和图像处理软件构成的车轮表面缺陷检测系统可以很好的凸出车轮表面的可疑缺陷,大大改善了现场的工作环境、降低劳动强度、提高生产的效益效率,可以有效的降低漏检事故的发生,对消除事故隐患有重要的意义。为高速列车的快速运行提供了可靠的安全保障。
[1]吴海滨,张杰,陈军,肖锋.基于CCD成像的轮毂表面荧光磁粉探伤方法及缺陷处理研究[J].大气与环境光学学报,2006,1(2):156-160.
[2]刘家朋,赵宇明,胡福乔.基于单尺度Retinex算法的非线性图像增强算法[J].上海交通大学学报,2007,41(5):685-688.
[3]邵敏,何展翔,张立恩.二维中值滤波在电磁测深曲线去噪中的应用[J].物探化探计算技术,2001,23(3):226-231.
[4]陈廉清,袁红彬,王龙山.SUSAN算子在微小轴承表面缺陷图像分割中的应用[J].光学技术,2007,33(2):305-307.
[5]王耀南:“计算机图像处理与识别技术”,北京:高等教育出版社,2001:150-170.
BASED ON LINEAR CCD WHEEL SURFACE DEFECT DETECTION SYSTEM OF IMAGE PREPROCESSING
WU Hai-bin1XIA Xu-tang2
(1 The Research Center of Special TV Technology of Anhui University,Hefei Anhui 230088)(2 School of Physics and Material Science,Anhui University,Hefei Anhui 230039)
The operation principle and structure of the wheel surface defects online testing system and were introduced,the excitation spectra and emission spectra of fluorescent magnetic particle,UV(ultraviolet)LED light-emitting characteristics were analyzed and studied,defect inspection system focuses on digital image processing and pattern recognition.After extraction of high-precision detection of linear array CCD image,through the use of image enhancement,smoothing noise reduction,edge extraction and binarization and other methods can effectively identify suspicious defect,complete on-line detection system identification defects alarming,etc.
UV LED;defect detection;image processing;pattern recognition
A
1672-2868(2011)03-0061-07
2011-04-09
安徽省“十一五”科技攻关项目(项目编号:08010204252)
吴海滨(1962-),男,浙江舟山人。安徽大学特种电视技术研究中心教授级高级工程师,研究方向:特种工业电视系列产品的开发设计及图像信息处理
责任编辑:宏 彬
猜你喜欢
电站辅机(2021年4期)2021-03-29
小读者(2019年24期)2020-01-19
电子制作(2019年15期)2019-08-27
安徽工业大学学报(自然科学版)(2019年4期)2019-03-31
汽车观察(2019年2期)2019-03-15
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
发明与创新·中学生(2016年7期)2016-05-14
电气化铁道(2016年4期)2016-04-16
