基于相关分析的组合导航 RA IM模型研究*
2011-11-23 06:33唐艳梅彭祥国
大地测量与地球动力学 2011年4期
唐艳梅 王 坚 彭祥国
(1)中国矿业大学国土环境与灾害监测国家测绘局重点实验室,徐州 221116 2)中国矿业大学环境与测绘学院,徐州 221116 3)江西省水利规划设计院,南昌 330029)
基于相关分析的组合导航 RA IM模型研究*
唐艳梅1,2)王 坚1,2)彭祥国3)
(1)中国矿业大学国土环境与灾害监测国家测绘局重点实验室,徐州 221116 2)中国矿业大学环境与测绘学院,徐州 221116 3)江西省水利规划设计院,南昌 330029)
探讨基于相关分析理论的组合导航 R I AM方法,并给出单个和多个探测粗差的相关分析检验流程。通过模拟12颗 GPS和 Galileo组合导航卫星定位系统,分别给单颗和两颗正常卫星加入粗差。仿真结果表明:观测值的影响向量与残差的相关系数可以定位含粗差的卫星并将粗差卫星予以剔除。
相关分析;相关系数;粗差探测;组合导航;RA I M
1 引言
随着 GPS、Galileo等卫星导航系统的广泛应用,用户对导航定位的精度提出了更高的要求。特别是卫星导航系统用于民用航空领域后,给出了卫星导航系统运行的两个重要指标:导航定位精度和完备性[1]。导航系统完备性是指当导航系统处于不健康状态、不能准确导航时向用户提供及时报警的能力[2,3],其核心是粗差的定位和剔除。而随着现代测量仪器的发展,测量手段不断趋于自动化和高效化,观测数据大大增加,粗差也随之增多,有学者通过分析得出:大约 1~10%观测数据含有粗差[4]。如何定位并剔除粗差是迫切需要解决的问题,自Baarda提出粗差检测理论后,不少学者根据其提出的思想开展了不同层次的研究,取得了大批开创性的研究成果。常用的算法有:最小二乘残差法[5]和奇偶矢量法[6,7]。已有学者证明,两者在粗差探测上是等效的[8]。基于相关分析理论,本文分析了测量误差与残差之间的关系,并利用相关分析法对相关观测量进行粗差的检测、定位和剔除。
2 相关系数及其检验
2.1 相关系数
根据相关系数的定义[9]:


由于不能直接计算出随机变量 X与 Y的相关系数,但可通过 X与 Y的子样中误差、协方差计算其估值,其计算式为:

2.2 相关系数显著性检验
ρ(同相关系数ρXY)的概率密度函数为[10]:

由于在实际测量中,我们只能通过相关的数理统计理论估算ρXY,为了保证所得估值的可靠性,需对估值进行检验。在此,可以通过直接查表或构造检验统计量来求得阈值ρα,本文采用直接查表的方法。在一定的显著性水平α和自由度为γ=n-2的情况下,可通过相关系数临界值表查得ρα的值。现做如下假设检验,原假设 H0:ρ=0,备择假设 H1:ρ≠0。若由实测数据通过式 (2)计算而得的ρXY大于相关系数临界值表中的ρα,则拒绝原假设 H0:ρ=0 (接受 H1:ρ≠0),认为显著性水平α下 X与 Y相关;反之,则接受原假设 H0:ρ=0(拒绝 H1:ρ≠0),认为显著性水平α下 X与 Y不相关。
3 组合导航 RA I M监测模型
3.1 相关系数的粗差探测模型
在间接平差中,测量误差ε与残差V的关系式为[]:

其中,A为线性化后的系数矩阵,P为观测值的权阵,Q为观测值的协因数阵 (Q=P-1),Qxx为参数的协因数阵,Qvv为改正数的协因数阵。对式 (4)中的R整理得:
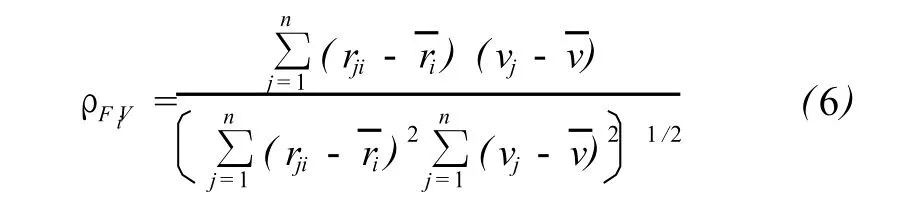
其中,Fi=[r1ir2i… rni]′,i=1,…,n,为观测值 Li的误差εi对残差V的影响向量。Fi的值取决于线性化后的系数矩阵A和观测值的权阵 P,它反映了观测值Li的误差εi对残差 V的作用程度。测量误差通过 Fi作用于 V中,Fi起到了对εi的缩放作用。当εi中不含粗差时,εi对 V的影响不显著,V是一组偶然误差的线性组合。若残差V含粗差,需要检测出含有粗差的观测值。根据统计原理,若观测值Li所对应的误差εi中含有粗差,则可通过其影响向量 Fi与残差V的相关系数来判断。根据式 (2)可计算出 Fi与V的相关系数,即:
3.2 RA I M监测技术路线
RA I M性监测可由以下 4步完成:第一步:对原有观测值进行最小二乘平差,计算残差向量V、验后方差。对验后方差进行检验 (此处采用χα检验),若不通过则说明观测值中含有粗差;第二步:计算矩阵 R和影响向量 Fi。根据式 (6)求 Fi与 V的相关系数ρFiV,并对ρFiV进行显著性检验。对于给定的α,若ρFiV>ρα,则将第 i个观测值标记并剔除;第三步:对剩余观测值进行第一、二步,直到检验通过。第四步:将第二、三步中剔除观测值逐一恢复到平差系统中,重新平差并检验验后方差。若不通过,则确认为粗差;若能通过,则认为第二 (或第三)步为误判,并将此观测值恢复。将最终判定为粗差的观测值剔除后再平差,输出结果。具体流程如图1所示。
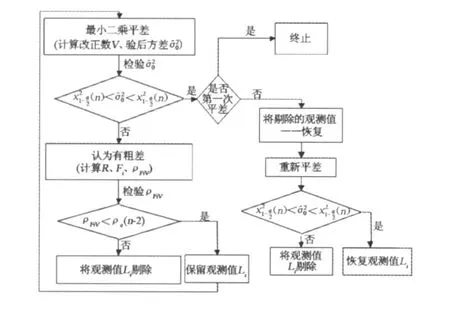
图1 粗差探测流程图Fig.1 Flowchart of gross error detection
4 实验分析
以徐州地区(34.21°N,117.13°E)为例,通过软件生成 GPS和 Gallieo卫星星座,模拟 GPS/Galileo组合导航系统,共 12颗可见卫星,其中 GPS卫星和Gallieo卫星各 6颗,卫星分布如图 2。卫星更新频率为 1 Hz,高度截止角为 15°。试验中模拟了对流层误差、电离层误差、多路径误差以及噪声误差,卫星全天 24小时的DOP值变化如图 3。由于 GPS与Gallieo系统误差源基本一致,定位误差相差不大,等值定权基本上不会影响定位结果,因此单位权方差取 2。选其中一个历元进行分析,分别给不同卫星所对应的伪距加粗差,所得到的相关系数如图 4~7所示。
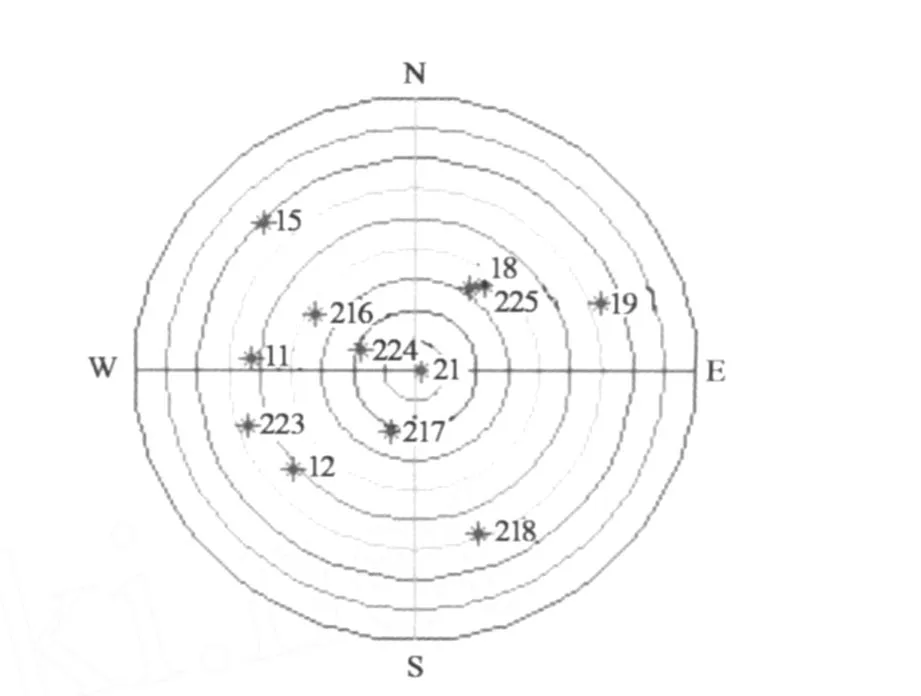
图2 卫星分布Fig.2 Satellite distribution
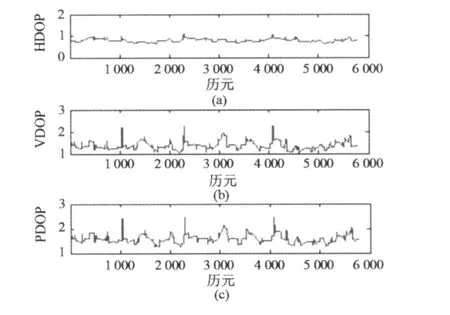
图3 卫星24小时的DOP值变化Fig.3 Satellite’sDOP in 24 hours

图4 PRN11加5 m粗差Fig.4 5 m gross errors plused to PRN11
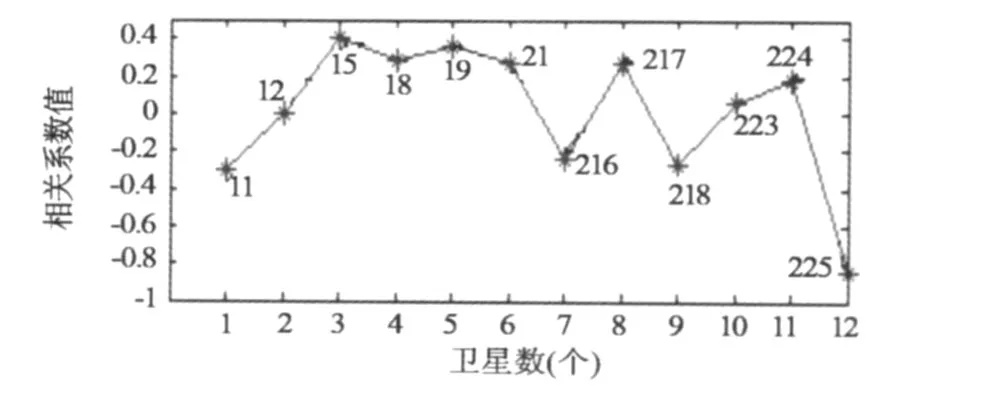
图5 PRN225加5 m粗差Fig.5 5 m gross errors plused to PRN225
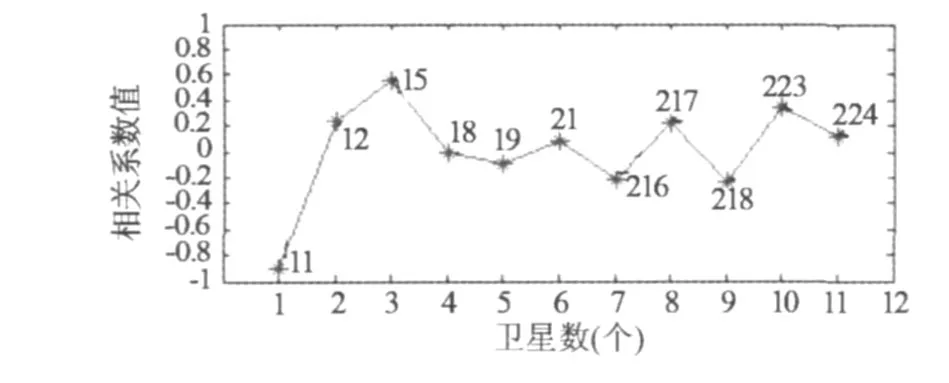
图6 恢复PRN11Fig.6 Recovery of PRN11

图7 恢复PRN225Fig.7 Recovery of PRN225
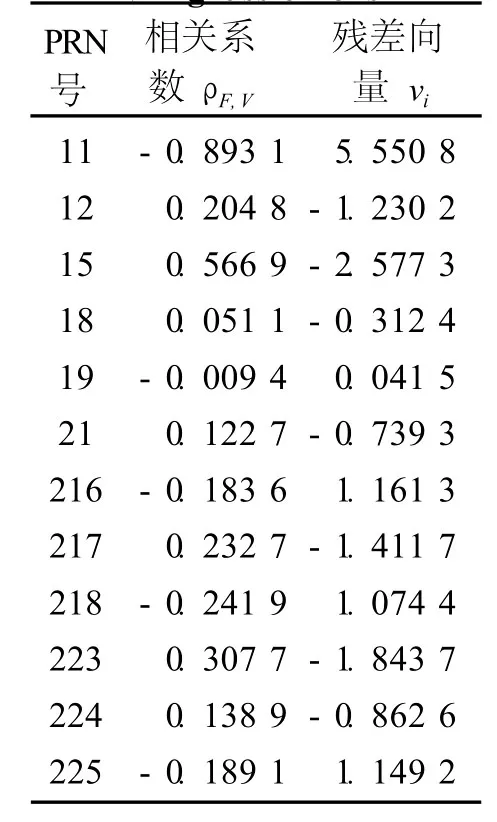
表1 PRN11加5m粗差Tab.1 5 m plused to PRN11 gross errors
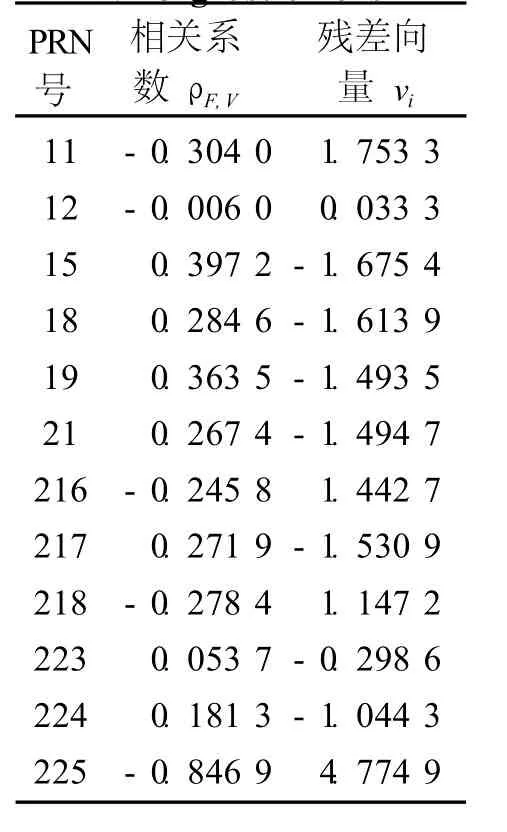
表2 PRN225加5m粗差Tab.2 5 m plused to PRN225 gross errors

表3 恢复PRN11Tab.3 Recovery of PRN11
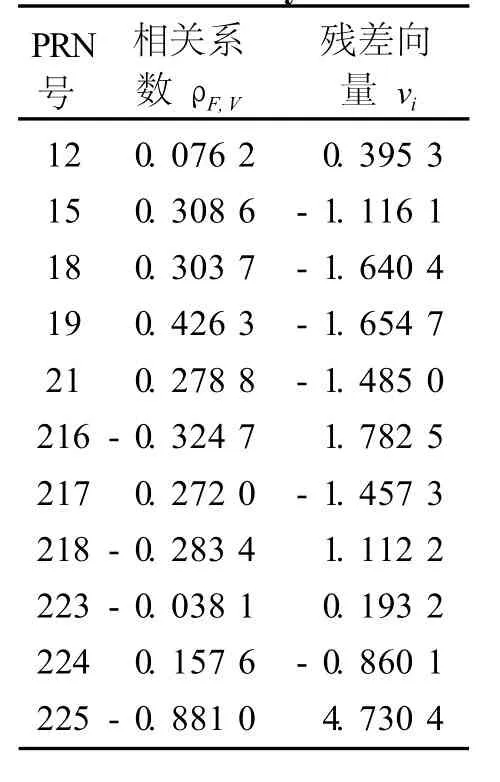
表4 恢复PRN225Tab.4 Recovery of PRN225
单粗差情况。分别给 11、225号卫星所对应的伪距加5 m粗差,各相关系数如图4、5。显著水平α取 0.01(下同),观测值个数 n=12,由相关系数临界表查得ρα(10)=0.708。由于相关系数的范围在[-1,1]之间,图 4、5不是很直观,但可以看与图 4、5相对应的表 1、2。从表 1中很容易看出只有 11号卫星的相关系数的绝对值 (0.9048)大于ρα(10),其余都小于ρα(10),且 11号卫星的残差向量最大,说明只有 11号卫星有粗差。同样的,从表 2中很容易发现只有 225号卫星有粗差。
多粗差情况。同时给 11、225号卫星对应的伪距加 5 m粗差,按照前文所述的方法,首先只定位到11号卫星含有粗差,先将其剔除;然后再将剩余观测值进行平差,计算相关系数,最后定位到 225号卫星含有粗差,将其剔除。通过两次平差计算相关系数,成功将含有粗差的观测值找出。为避免误判,再将 11、225号卫星分别恢复检验,恢复结果如图 6、7 (对应表 3、4)。从表 3、4可以发现,恢复后两颗卫星的相关系数值仍大于给定的阈值,说明没有误判,最后确定 11、225两颗卫星含有粗差,将其剔除。进行最后的平差,输出结果。
通过模拟实验,对于单、多粗差,相关系数法都可成功定位粗差。显然,单粗差比多粗差容易定位。对于单粗差,只需一步就能定位。但对于多粗差,会出现两种情况:一种是一步就能定位出所有含粗差的观测量;另一种是需要多次循环才能将所有含粗差的观测量找出。第一种现象多出现于观测量之间相关性较弱的情况。第二种多出现与观测量间相关性较强的情况。虽然第二种情况下的多粗差定位稍有繁琐,但相对于传统的向前-向后选择法简单得多。
5 结语
GPS/Galileo组合导航中数据观测量大,存在粗差的可能性也大,粗差的存在会大大降低导航定位的精度,甚至会产生误导。针对这一问题,文中基于相关分析理论,利用相关分析法对模拟观测值进行了粗差的检测和定位。此方法对于单粗差,只需一次就可定位出含粗差的观测量;对于多粗差,可能需要重复多次才能成功地将所有含粗差的观测量找出。但总的来说,对于单个或多个粗差的识别效果都比较明显。
1 秘金钟,赵春梅,李玮.Galileo中国区域完备性监测指标SI AMA研究[J].武汉大学学报 (信息科学版),2009,34 (10):1 172-1 175.(Bei Jinzhong,Zhao Chunmei and Li Wei.Study on SIS MA index of China region integrity monitoring of Galileo project[J].Geomatics and Information Science ofWuhan University,2009,34(10):1 172-1 175)
2 郭睿,郑勇,杜兰.GPS和 Galileo系统下 RA I M算法可用性分析[J].测绘科学技术学报,2006,23(6):448-450. (Guo Rui,Zheng Yong and Du Lan.Analysis on RA I M availability of different navigation systems[J].Journal of Zhengzhou Institute of Surveying and Mapping,2006,23 (6):448-450)
3 卢虎,廉杰.北斗用户机自主完好性监测研究[J].空军工程大学学报(自然科学版),2010,11(3):53-57.(Lu Hu and Lian Jie.Research on RA I M algorithm ofBeidou receiver[J].JournalofAir Force EngineeringUniversity(Nnatural Science Edition),2010,11(3):53-57)
4 Huber P J.Robust statistics[M].New York:W iley,1981.
5 黄晓瑞,田巍,李波.GPS接收机的自主完善性监测算法研究[J].遥测遥控,2003,24(1):1-3.(Huang Xiaorui, TianWei and LiBo.Research on autonomous integritymonitoring algorithm of GPS receiver[J].Journal of Telemetry, Tracking and Command,2003,24(1):1-3)
6 秘金钟,李毓麟.RA I M算法[J].测绘通报,2001,(3):7 -9.(Bei Jinzhong and Li Yulin.Research on RA I M algorithm[J].Bulletin of Surveying and Mapping,2001,(3):7 -9)
7 秘金钟,谷守周,方书山.基于向量相关距离的新型RA I M算法[J].中国科学:物理学 力学 天文学,2010, 40:638-643.(Bei Jinzhong,Gu Shouzhou and Fang Shushan.A new RA I M method based on vector correlation distance[J].Scientia Sinica Phys,Mechamp;Astron.,2010,40:638-643)
8 Grover R B.A baseline GPS RA I M scheme and a note on the equivalence of three RA I M methods[J].Navigation, 1992,39(3):301-316.
9 盛骤,谢式千,潘承毅.概率论与数理统计[M].北京:高等教育出版社,2001.(Sheng Zhou,Xie Shiqian and Pan Chengyi.Probability and statistics[M].Beijing:Higher Education Press,2001)
10 李庆海,陶本藻.概率统计原理和在测量中的应用[M].北京:测绘出版社,1982.(Li Qinghai and Tao Benzao. Probability and statistics theory and application in measurement[M].Beijing:Surveying andMapping Press,1982)
11 陶本藻.测量数据处理的统计理论和方法[M].北京:测绘出版社,2007.(Tao Benzao.Statistic theory and method of surveying data processing[M].Beijing:Surveying and Mapping Press,2007)
RESEARCH ON INTEGRATED NAVIGATI ON RA I M MODEL BASED ON CORRELATI ON ANALYSIS
Tang Yanmei1,2),Wang Jian1,2)and Peng Xiangguo3)
(1)Key Laboratory forLand Environm ent and D isasterM onitoring of SBSM,CUM T,Xuzhou 221116 2)School of Environm ent and Spatial Infor m atics,CUM T,Xuzhou 221116 3)Jiangxi ProvincialW ater Conservancy Planning and Designing Institute,N anchang 330029)
The principle,calculation method of correlation coefficient,and its significance testwere described. Focusing on integrated navigation RA I M model,the integrated navigation RA I M method based on correlation analysis theorywas probed,testing processof single and multiple gross errors detectionwaspresented.By simulating the 12 GPS and Galileo navigation satellite positioning system,outlierswere added to single and t wo satellites,respectively.Simulation results show that the correlation coefficient of observations’influence vector and residual error can locate and remove satelliteswhich contain gross errors,improving the navigation positioning accuracy.
correlation analysis;correlation coefficient;gross error detection;integrated navigation;RA I M
1671-5942(2011)04-0139-05
2011-04-14
国家自然科学青年基金 (40904004);国家自然科学基金(41074010);江苏省自然科学基金(BK2009099);教育部留学回国人员科研启动基金;教育部博士点基金 (新教师)(200802901516);国土环境与灾害监测国家测绘局重点实验室开放基金(LEDM2009A01,LEDM2010B12);江苏省“青蓝工程”基金
唐艳梅,女,1986年生,硕士研究生,主要从事卫星导航的研究.E-mail:tymdyx@163.com
P207
A
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
中国人兽共患病学报(2020年11期)2020-12-08
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
电子制作(2019年24期)2019-02-23
西南交通大学学报(2018年5期)2018-11-08
知识产权(2016年8期)2016-12-01
高中生学习·高三版(2016年9期)2016-05-14