船载铲斗挖掘机作业监视仪的设计与实现
2012-01-22 10:29,
船海工程 2012年5期
,
(海军大连舰艇学院,辽宁 大连 116018)
船载铲斗挖掘机是具有4个自由度运动形态的独立机械,结构复杂、用途广泛。其作业过程的多样性和复杂性给操作带来了很大的困难。除了上车回转机构外,其动臂、斗杆和铲斗3机构的运动位置与船本身无任何参照关系。要想了解其运动形态(特别在水下),只能针对挖掘机本身来进行研究。
在河床和海底疏浚工程中,经常使用船载铲斗挖掘机。由于铲斗通常没入水中作业,司机无法直观了解水下情况,全凭经验进行和记忆作出判断,给生产带来很大的困难。
海军某部曾将水下摄像头安装在铲斗和斗杆上,通过摄像的方式了解水下作业情况。而实际使用中,却发现效果并不理想。由于工作环境恶劣,海水、泥沙、石子、振动、冲击等环境因素对于摄像头工作十分不利,水下泥沙多,水质浑浊,无法清晰观察到水下的铲斗的运动形态。
“铲斗挖掘机作业监视仪”采用计算机、传感器及显示装置组成系统,通过运动机构与船舶参数和环境参数的相关性,应用计算机图形仿真技术,对挖掘机的作业轨迹进行计算与显示,实时处理挖掘机的工况与状态。作为挖掘机作业的“耳目”有利于减轻司机的劳动强度,提高生产率和疏浚质量,具有较大的经济价值和社会价值。
1 系统设计
1.1 设计方案
铲斗挖掘机作业监视仪系统由以下各部分组成。
1)一体化工业PC机一台;
2)彩色VGA显示器一台;
3)传感器信号采集模块一个;
4)传感器若干。
系统组成见图1。

图1 系统结构
1.2 工作原理
角位移电位器外观和原理见图2、3。由图3可知:
RX/R=X/L
所以
U=E(X/L)或X=L(U/E)
故通过测量图中电压U就可以计算出角度位移[1]。
由电位器和转动轴构成角度信号传感器的主要部分,转动轴与被测部位通过同步带或齿轮动相关联,转动轴再将旋转运动传递给电位器。角度信号传感器封装在一个金属盒里,要求有良好的防水、防油、防震性能。同时,转角信号误差小于±0.8°。

图2 角度传感器

图3 角度传感器原理
图4和图5所示为四路转角信号。其中,铲斗传感器安装在铲斗转轴部位,随铲斗的转动送出相对应角度的模拟量,用γ表示。

图4 X轴向横截面
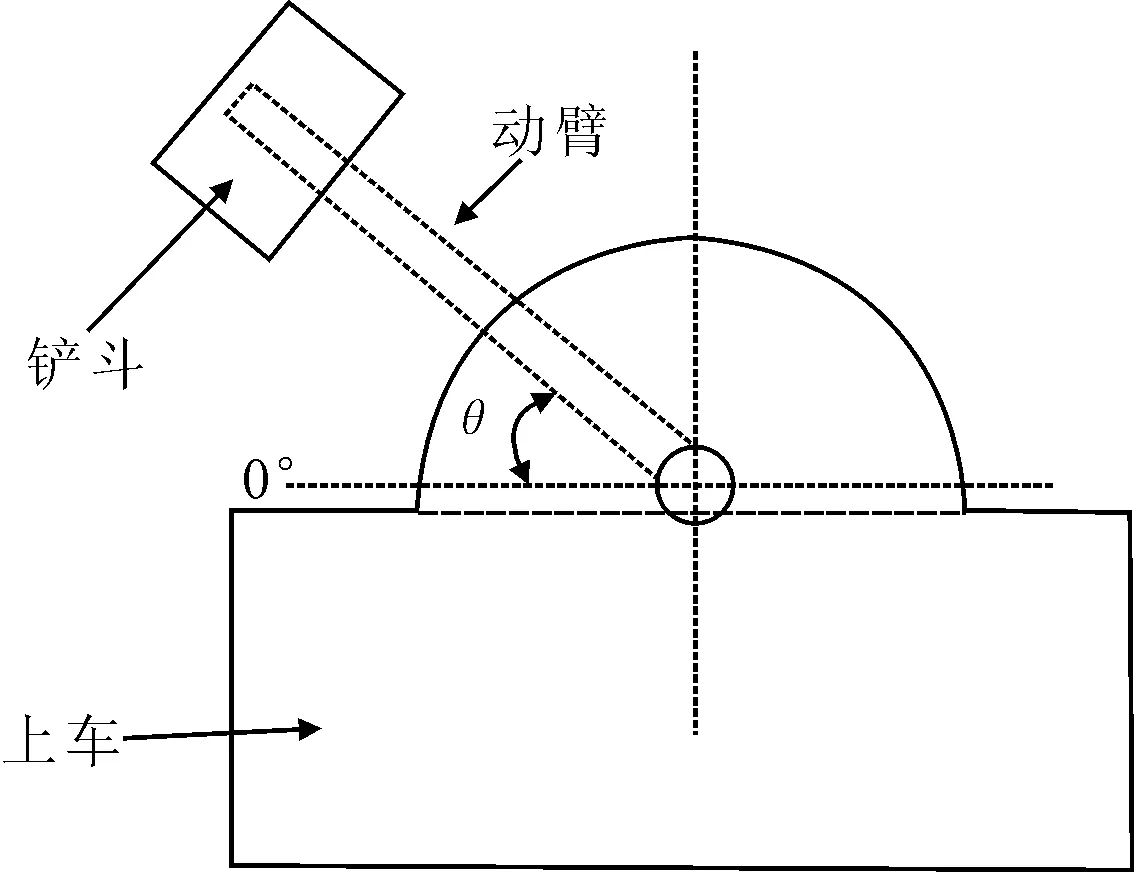
图5 Y轴向横截面
动臂传感器安装在动臂转轴部位,随动臂的转动送出相对应角度的模拟量,用α表示。
斗杆传感器安装在斗杆转轴部位,随斗杆的转动送出相对应角度的模拟量,用β表示。
回转传感器安装在上车与底座之间,当上车转动时,送出相对应角度的模拟量,用θ表示。
传感器信号采集模块的功能就是实时采集这四路传感器信号,并通过RS232通讯接口将信息送到工控主机。工控主机经过计算处理后,以仿真图形方式在显示器上显示出来,便于操作者直观了解整个挖掘机工作状态。

图6 信号采集模块
1.3 硬件电路设计
信号采集模块主控制芯片采用美国ATMEL公司的AT89C52单片机,这是一款以MCS-51为内核的高性能单片机[2],内部集成8 kfalsh,256 ByteSRAM,3个16位定时器,1个UART通讯接口,性能稳定,抗干扰能力强,完全满足项目要求。
ADC转换芯片使用TI公司的TLC2543,TLC2543是TI公司的12位串行模数转换器,使用开关电容逐次逼近技术完成A/D转换过程[3]。由于是串行输入结构,能够节省51系列单片机I/O资源;且价格适中,分辨率较高,因此在仪器仪表中有较为广泛的应用。AT89C52通过TLC2543实时采集γ、α、β、θ等4路角度传感器送来的电压信号,经过单片机的内部运算,转换成角度信号。根据ADC的工作原理,12位的ADC分度数为4 096,即将360°分成4 096等分,分辨率为
F=360°/4 096≈0.09°
单片机将采集到的AD值转换为角度值,
Phase=AD×F
实际应用中,传感器经过校准会得到一个倍乘系数a和一个偏移系数b,
Phase=Phase×a+b
这样,就得到一个精确的角度值。单片机通过UART通讯接口+MAX232电平转换芯片将角度信号送到工控机进行数据处理。
2 系统功能实现
配合上述硬件设施,必须在工控主机上安装《WJ2挖掘机作业监视仪》软件。这是一款用VC编写的专用软件,在接收信号采集模块传送的角度信号的同时,实现挖掘机作业的参数设置,数据显示,仿真图像显示等功能。
2.1 参数设置
到达一作业点定位下桩后,在挖掘前设置有关参数。若不设置,系统将沿用原设置值。用户需要设置如下参数。
1)挖深和水位。均为相对于吴淞零点设置,系统依据水位变化自动修正挖深,m。
2)左右限宽为在平面显示图(俯视图)中对理想挖掘区域之X轴向范围限制,m。
3)吃水。为下桩定位后船体的吃水值,m。
4)方位角。指出船头方向,(°)。
5)斗杆长度。有5、7 m两种选择,设置值若不为5 m,则一律为7 m。
6)水深值。是在理想挖掘区域中线横截面图X方向每隔4 m取一点水深,一共取9个点,其中第5点水深对应横截面X向中间点,m。
2.2 数据显示
1)日期、时间。为系统的日期时间。
2)平均水深。为上述9点水深值的平均值。
3)当天累计斗数。系统根据操作的阀控信号自动累计。
4)移船次数。系统根据移船操作自动累计。
5)产量。为累计斗数与每斗土立方的乘积。
2.3 仿真图像显示
图像仿真窗口有4个画面,分别为横剖面挖掘图、俯视挖掘图、挖掘区域示意图、挖掘深度示意图。每个画面均由若干二维图形构成,由系统根据传感器信号采集模块上传的数据,经过运算,从图片库中调用相对应的图片显示出来。
仿真窗口的下方显示实时工况数据,为使显示界面形象直观,在设计时作如下规定。
1)挖掘区域的图像。画面中用蓝色表示已挖掘区域,绿色表示待挖掘区域,即已经挖掘机包络图所定的与预定挖深相关的理想挖掘区域,按此预定区域挖掘有利于提高作业效率;棕色表示限挖区域。
2)挖掘机铲斗的图像。为红色时,表示铲斗带土;为黄色时,表示处于合适下铲开挖的位置;为白色时,表示铲斗为空。
3)运用自动分析技术,验证参数间的正确关系[4]。在坐标标尺上配以动态黄线条指出铲齿端中心位置,在参数区实时显示重要参数。当出现过挖、重挖、漏挖、铲齿进入船体保护线、限制线、限挖区等工况时,系统将通过扬声器报警,并显示出相应的报警信息。
4)在平面图中作业实况以不同颜色表示不同的挖掘深度。达到或超过预定深度则为蓝色(差值≤0.2 m),相差较大时为亮绿色(差值≤4.0 m),其余为绿色。
3 结论
仿真软件应用在特殊场合,确实给工作带来很大的便利。经过实际应用检验,船载铲斗挖掘机作业监视仪有效地解决了司机“盲目”操作的问题,显著提高工作效率和工程质量,减轻了操作者的劳动强度。在该项目的实施过程中,通过查阅大量资料,结合现场实际情况了解到,如果将信号采集模块和工控机以及VGA做成一体机,将很大程度减小设备体积,节省驾驶室空间。
[1] 李瑜芳.传感器原理及其应用[M].成都:电子科技大学出版社,2008.
[2] 陈光东.单片微型计算机原理与接口技术[M].2版.武汉:华中理工大学出版社,2009.
[3] 卢 鑫,庞伟止.新型模数转换器TLC2543的串行接口及其应用[J].集成电路应用,2002(1):66-67.
[4] JIM Ledm.仿真工程[M].焦宗夏,王力萍,译.北京:机械工业出版社,139-141.
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
学生天地(2020年16期)2020-08-25
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
有色金属设计(2015年2期)2015-02-28