
搜救蚂蚁机器人设计
2012-04-20 09:31孙世成毛丽民张笠君许震
常熟理工学院学报 2012年4期
孙世成,毛丽民,张笠君,许震
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
搜救蚂蚁机器人设计
孙世成,毛丽民,张笠君,许震
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
针对目前的搜索机器人体积庞大,无法进入狭小空间内搜寻幸存者,而且搜索到幸存者所花的时间比较长等缺点,提出了一种以MSP430F2234单片机为控制核心的蚂蚁机器人设计方案,蚂蚁机器人搜索相互独立,采用红外传感器相互通讯.与通常的搜索机器人相比,蚂蚁机器人功耗低、体积小,能快速、准确地搜索到目标.
搜救;蚂蚁机器人;MSP430F2234单片机
地震、火灾、矿难等灾难发生后,在废墟中搜寻幸存者,给予必要的医疗救助,并尽快救出被困者是救援人员面临的紧迫任务.由于灾难现场情况复杂,救援人员在存在有害物、烟雾、灰尘和一氧化碳等危险的情况下是很难进入现场开展救援工作的,此外,废墟中形成的狭小空间使搜救人员甚至搜救犬也无法进入[1].
近十年来,尤其是“911”事件之后,美国、日本等发达国家在地震、火灾等救援机器人的研究方面做了大量的工作,研究出了各种可用于灾难现场救援的机器人.轮履式机器人是一种最常见的,在传统的轮式移动机器人的基础上发展起来的搜救机器人,但由于体积普遍偏大,不太适合在倒塌的建筑物废墟中狭小空间内搜寻幸存者.而且现有的搜救机器人,是独自的搜索幸存者,机器人相互之间没有通信,搜索速度比较慢,搜索到幸存者所花的时间比较长[2].
1 设计原理
在搜索的过程中,通过红外相互通信,了解彼此状态.当一个蚂蚁搜救机器人找到幸存者后,该蚂蚁搜救机器人就会通过红外信息通知其他蚂蚁机器人,其他蚂蚁机器人收到信息后,向其靠拢,并发出报警声.蚂蚁搜救机器人通过相互协作,实现在复杂情况下快速、准确的搜索到幸存者.当蚂蚁搜救机器人在搜索过程中遇到障碍物,触角开关就会被触动,蚂蚁搜救机器人就会转向.
2 硬件电路设计
本设计基于MSP430微处理器,构建了具有目标搜寻与检测功能的蚂蚁机器人.蚂蚁机器人系统的组成主要包括微处理器部分、电源供电部分、电机控制部分、目标搜寻与检测部分、通讯部分等,如图1所示.
2.1 微处理器
本设计采用了MSP430F2xx系列中的MSP430F2234.MSP430F2234具有16位控制器、8 KB闪存、512 B RAM,其电源电压采用1.8~3.6 V,待机电流小于1 μA,在RAM数据保持方式时耗电仅0.1 μA,在活动模式时耗电250 μA,I/O输入端口的漏电流最大为50 μA;强大的处理能力,内部采用目前最流行的、颇受学术界好评的经典指令集结构,内部集成了丰富的片上外围模块,包括12位ADC、DAC、比较器、LCD驱动器、电源电压监控、串行通讯、红外线控制器、DMA控制器等[3].
2.2 电源模块设计
如图2所示,本电路主要通过稳压管MCP1702给单片机MSP430提供一个稳定的电压.稳压管MCP1702的3引脚输入电压范围为2.7 V~13.2 V,2引脚输出电压为3.3 V.B+和B-两端分别连接320 mA锂电池的正负端.开关SSSS210810控制蚂蚁机器人的启动和停止.图中的电容均用来滤波,100 μF的电容用来过滤高频波,4.7 μF的电容用来过滤低频波.
2.3 电机驱动电路
采用六个场效应管来控制两个电机.如图3所示,信号端M1、M2、MP、MN由单片机MSP430控制,连接具有10 K上拉电阻的Vbatt处,因为单片机MSP430是由3.3 V的稳压管供电,而Vbatt处的电压为锂电源的两端电压高至4.2 V.
当M1为低电平MN、MP为高电平时,Q1P与Q2N导通,电机1正转.电机状态编码如表1所示.
2.4 电池充电模块
电子设备电源部分是整个系统的基础,这部分的稳定工作对整个主控板的稳定工作起着至关重要的作用.
本设计采用MCP73833高级线性电池管理控制器,用于给锂电池充电,详细说明如下:
(1)电池管理输入电压VDD是MCP73833/4器件的输入电源,接5 v至6 V的外部恒流电源.
(2)通过在PROG引脚和GND之间的电阻来控制充电电流的大小.编程电阻和充电电流可以通过(1)式计算,其中IREG为充电电流,RPROG为PROG引脚和VSS之间的电阻.

图1 蚂蚁机器人示意图
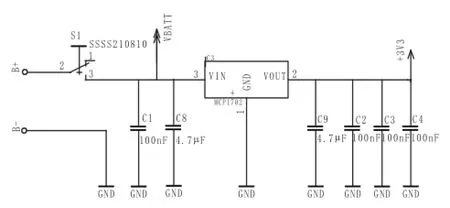
图2 电源模块电路

图3 电机驱动电路

表1 电机转动状态编码

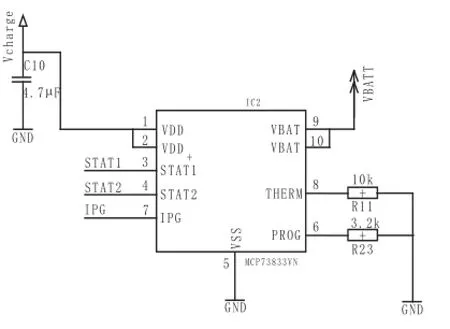
图4 电池充电电路
(3)电池充电控制输出VBAT电池充电控制输出引脚,与电池组的正极相连.此为内部P沟道MOSFET的漏极. MCP73833通过在线性工作区控制该MOSFET工作来给电池组提供恒流和恒压调节.
(4)温度判断THERM,由于不需要温度监控功能,所以在THERM引脚和VSS之间连接一个标准10 K电阻.
(5)电池管理0 V参考电压VSS接该引脚接电池的负极和输入电源的地.
(6)状态指示STAT1、STAT2、PG如表2所示,接MSP430的引脚. 2.5红外通讯模块
红外通信技术就是利用红外线来传递数据,是无线通讯技术的一种.其优点是保密性强,信息容量大,结构简单,既可以在室内使用,也可以在野外使用.通过对发送信号进行编码、调制,具有可靠性高、误差小、成本低、传输距离远、功耗低等特点.一般由红外发射和接收系统两部分组成,通过数据电脉冲和红外光脉冲之间的相互转换实现无线的数据收发.发射系统对一个红外辐射源进行调制后发射红外信号,而接收系统用光学装置和红外探测器进行接收.
蚂蚁机器人的红外发射电路如图5所示.信号TX由单片机MSP430控制,当MOS管的栅极G为高电平时,红外发射二极管点亮发射红外线;当MOS管的栅极G为低电平时,红外发射二极管断开.
蚂蚁机器人的红外通信电路中的接收电路如图6所示.蚂蚁机器人用三个红外光敏二极管来接收各个方向的红外线.此处光敏二极管不但用于接收红外线,还用做环境光传感器,而这两个功能在电路中需要不同的上拉条件.当用于接收红外线时,因为这时光敏二极管的电阻阻值变化幅度很大,只需要低灵敏度,所以上拉电阻选择10 K;当用于环境光传感器时,因为光敏二极管的电阻阻止变化幅度很小,所以需要很高的灵敏度,上拉电阻选择100 K.单片机MSP430控制信号端BIAS1和BIAS2适当的转换这两种情况.电路中的交流耦合用来过滤由环境光所产生的直流.10 K的电阻和330 pF的电容构成高通滤波电路,用来过滤直流和低频交流信号.滤波器大概在1 kHz处会有3 dB的频率衰减.接收信号有叠加的直流信号,由于电阻R20和R21的分压,直流电压值为所提供电压的一半.每个光敏二极管的直流电压输入到单片机MSP430的PD1,PD2和PD3端.当接收红外线的信号为0时,此时没有被红外发射管的红外信号所覆盖,光敏二极管不用于接收红外线,上拉电阻的切换与环境光度的测量同时进行.

表2 充电周期状态
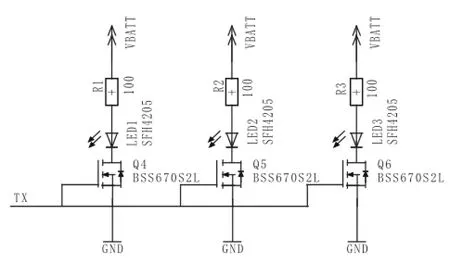
图5 红外发射电路

图6 红外线接收电路
2.6 目标检测模块
由位于车底的灰度传感器进行判断是否找到目标.灰度传感器由反射式红外光电判读器组成,即一个红外发光管和红外三极管并排绑定构成.其电路图如7所示.2.2 K电阻是光敏晶体管的上拉电阻,信号目标与单片机MSP430的数字输入接口相连.分别测量目标端在有光照和没有光照的信号,将这两个信号相减得到反射度.
2.7 指示电路
指示电路用于显示蚂蚁机器人的状态,如图8所示.红灯亮表示搜索到目标,灭表示未搜索到目标.绿灯亮表示电量不足,灭表示电量充足.

图7 目标检测电路
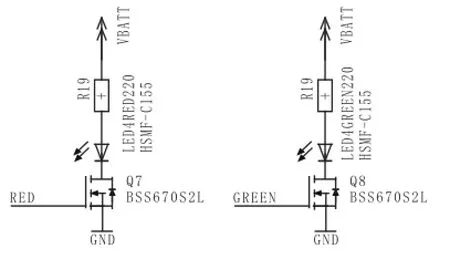
图8 指示电路
3 蚂蚁机器人的软件设计
3.1 蚂蚁机器人搜索示意图
每个蚂蚁机器人在一定范围内搜索目标,而且搜索的过程彼此独立,仅通过传感器进行通信,实现不同蚂蚁机器人之间不断进行信息交流和传递,从而能够相互协作,完成寻找目标的任务.
在示意图中有4个蚂蚁机器人,当1号蚂蚁机器人找到目标的时候,发出红外信号通知其他蚂蚁机器人目标已经找到,在发出的红外信号中加入特征码,区别找到目标的蚂蚁机器人,其他蚂蚁机器人接受到红外信号后就停止搜索目标.每个蚂蚁机器人上3个红外发射管构成360度,三个红外发射管轮流发出红外信号,在120度的范围内接收到信号的蚂蚁机器人根据红外信号的强度和接收的时间段判断机器人之间的相对方位和距离,再向1号蚂蚁机器人发出应答信号,然后通过各机器人之间的互相通讯获得各机器人的位置,而较远的机器人可通过与之临近的机器人找到目标,使各机器人选择路径,做出最快的动作,最终在最短的时间内找到目标.
3.2 主程序流程图
机器人启动时,先初始化各模块,然后进入随机寻找(随机运动)状态,当搜索到目标后机器人停止运动,进入通讯状态,告知其他机器人目标以找到,并检查是否所有的机器人接受到,如果没有并且没有接受到有效的红外信号,则继续搜寻,如果接受到了其他机器人发射的目标信号,则开始以细胞分裂状通知其他机器人,当所有的机器人收到目标信号后开始向目标靠拢,最后找到目标.

图9 蚂蚁搜索示意图
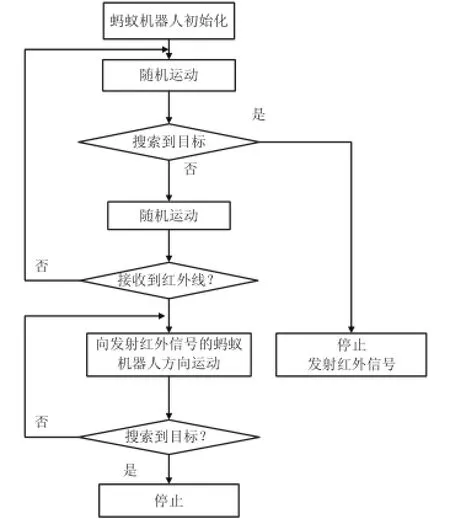
图10 主程序流程图
4 实验调试
为了验证所设计的蚂蚁机器人的可行性,在完成硬件设计的基础上,进行了相关的实验,图11的(a)-(f)图显示了蚂蚁机器人的搜索过程.从实验结果可以看出,本设计是可行的.

图11 蚂蚁机器人的搜索过程
[1]董晓坡,王绪本.救援机器人的发展及其在灾害救援中的应用[J].防震减灾工程学报,2007,27(1):112-117.
[2]王忠民.灾难搜救机器人研究现状与发展趋势[J].测控技术,2007(17):152-155.
[3]沈建华,杨艳琴.MSP430系列16位超低功耗单片机原理与实践[M].北京:北京航空航天大学出版社,2008:125-146.
[4]刘刚,彭荣群.Protel DXP 2004 SP2原理与PCB设计[M].北京:电子工业出版社,2007:283-320.
The Design of the Ant Robots Based on Search and Rescue Function
SUN Shi-cheng,MAO Li-min,ZHANG Li-jun,XU Zheng
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
There are many disadvantages of search robots at present.For example,the large volume prevents robots from entering the confined space to search for survivors and it takes too much time to find the survivors.In this pa⁃per,a kind of ant robot based upon MSP430F2234 microprocessor is proposed.The ant robot can search indepen⁃dently and communicate with each other using infrared sensors.Ant robots have low power consumption,small vol⁃ume,and find the target rapidly and accurately.
search and rescue;ant robots;MSP430F2234 microcontroller
TP368.1
B
1008-2794(2012)04-0064-05
2012-03-16
江苏省大学生实践创新训练计划项目“基于搜救功能的蚂蚁机器人设计”(S1133)
孙世成(1991—),男,江苏徐州人,常熟理工学院电气与自动化工程学院自动化专业学生.
毛丽民(1981—),男,江苏常熟人,讲师,硕士,研究方向:机器人与目标跟踪研究,E-mail:maolimin_1981@163. com.
猜你喜欢
环球时报(2022-05-23)2022-05-23
医学概论(2022年3期)2022-04-24
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
少儿科学周刊·儿童版(2017年5期)2017-06-29
学苑创造·A版(2017年3期)2017-04-27
光学精密工程(2016年3期)2016-11-07
工业设计(2016年4期)2016-05-04
学苑创造·A版(2014年6期)2014-08-04
