
太阳能自动跟踪机器人
2012-04-20 09:31费敏毛丽民张笠君陆郁民
常熟理工学院学报 2012年4期
费敏,毛丽民,张笠君,陆郁民
(常熟理工学院电器与自动化工程学院,江苏常熟 215500)
太阳能自动跟踪机器人
费敏,毛丽民,张笠君,陆郁民
(常熟理工学院电器与自动化工程学院,江苏常熟 215500)
提出一种基于AT89S52单片机的双轴太阳能自动跟踪机器人的设计方法,以跟踪传感器为跟踪元件,判断太阳能电池板是否与太阳光垂直,同时通过控制系统对双轴跟踪装置进行调整.实验表明该机器人运行稳定,跟踪效率高,具有较高的实用价值.
太阳能;双轴跟踪;机器人
在现有的能源结构中,主要是石油,天然气,煤炭等化石能源.然而,这些能源都是不可再生能源.并且这些能源的资源也非常有限[1].面对有限的能源和人类对能源的无限需求,人们开始探寻可替代当前能源的新型能源.太阳能无疑是一种环保、绿色的能源,而且它是巨量的、可再生的能源.太阳能板的发电效率与太阳光照射到太阳能板的角度有关[2].在发电过程中,若太阳能板实时与太阳光保持垂直的角度,则能较大地提高发电效率[3].本文设计了基于AT89S52单片机的双轴自动跟踪太阳能机器人.
1 太阳跟踪系统设计
1.1 太阳能跟踪方案设计
太阳能跟踪机器人如图1所示,系统采用步进电机作为太阳能电池驱动机构,与其它类型电机相比具有容易实现精确开环控制,无积累误差等优点.太阳能跟踪控制装置有两个自由度,两个步进电机分别控制着太阳能电池板在水平和垂直方向上的转动.太阳能跟踪装置依靠水平方向的转动实现太阳方位角的跟踪,垂直方向的转动实现太阳高度角的跟踪.太阳能电池板与过充过放保护电路连接.蓄电池给单片机、步进电机供电,单片机控制机器人的运动方向,实现太阳能最大功率的跟踪.
1.2 太阳跟踪装置设计
目前国内使用较为广泛的是单轴跟踪装置,单轴跟踪装置只能控制水平方位,俯仰方位则固定一个角度(-23.5°到23.5°之间[4]).这种装置的结构比较简单,但是不能始终与太阳光保持垂直,也就不能获得最大的发电功率.本文设计的太阳跟踪装置设计如图2所示.装置采用双轴跟踪方式,能够在太阳高度和方位的变化上都跟踪太阳,在工作时该系统根据太阳光的入射角度控制电机的运动,从而达到太阳能板与太阳光始终垂直.这种跟踪系统的特点是跟踪精度高,支撑结构的设计比较容易[5].
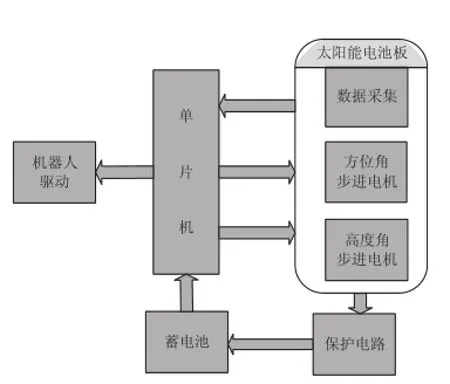
图1 太阳能跟踪机器人示意图

图2 机器人双轴跟踪装置示意图
2 太阳跟踪系统的硬件设计
2.1 单片机最小系统设计
本系统采用的是51系列单片机.51单片机价格低廉,性能稳定,抗干扰能力强,是开发低端产品的首选.它具有丰富的内部资源,较大的数据、程序存储区.本系统使用AT89S52单片机来实现整个系统的控制.系统工作所需外围电路包括:电源、复位电路及晶振电路,如图3所示.
2.2 跟踪传感器的数据采集电路设计
如图4所示,本数据采集电路由双运放LM324与R1、R2构成两个电压比较器,参考电压为VDD(12 V)的1/2.光敏电阻RT1、RT2与电位器RP1和光敏电阻RT3、RT4与电位器RP2分别构成光敏传感电路,该电路的特殊之处在于能根据环境光线的强弱进行自动补偿.将RT1和RT3安装在垂直遮阳板的一侧,RT4和RT2安装在另一侧.当RT1、RT2、RT3和RT4同时受环境自然光作用时,RP1和RP2的中心点电压不变.如果只有RT1、RT3受太阳光照射,RT1的内阻减小,LM324的3脚电位升高,1脚输出高电平.同理,如果只有RT2、RT4受太阳光照射,7脚输出高电平.这部分主要功能就是采集信号并转换成数字信号,然后送入单片机,由单片机作进一步处理.
2.3 蓄电池过充过放保护电路设计
铅蓄电池如果放电过度,将使硫酸铅晶体增大,这不仅增加了极板的电阻,而且在充电时很难使它再还原,直接影响蓄电池的容量和寿命[6].蓄电池过充过放保护电路如图5所示.
蓄电池保护电路分欠电压保护和充电保护电路两部分.当蓄电池电压在9 V以上时,VZ1击穿导通,A点电压为正,VT1反向截止,VT2导通,电流经C2触发V1导通,蓄电池正常输出电压,发光二极管LED1熄灭,发光二极管LED2发光,作电池电压正常指示.当蓄电池电压下降到9 V时,VZ1截止,A点电压为负,VT1正向导通,C2正极所充电荷经V2加于V1阴极,使V1阴极瞬间加上反向电压而截止,输出端无电压输出,发光二极管LED2熄灭,发光二极管LEDI发光,指示电池电压不足,实现了蓄电池的保护.
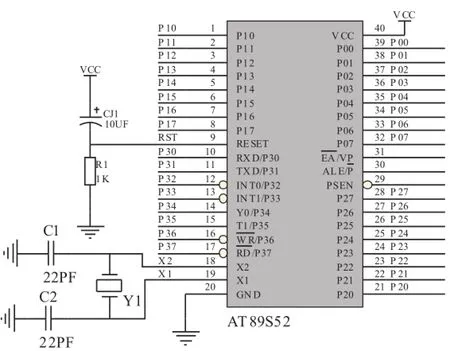
图3 单片机系统电路图

图4 数据采集电路原理图
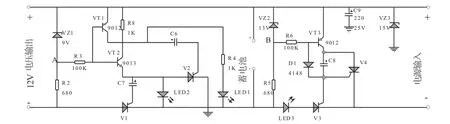
图5 蓄电池过充过放保护电路原理图
当蓄电池电压达到13.5 V左右时,VZ2击穿导通,B点电位为正,VT3反向截止,VD1导通,并触发V4导通.C3正极在原先VT3导通时所充电荷经V4加于V3阴极,使V3瞬时加上反向电压而截止,关断充电电源.同时充电指示灯LED3停止发光,而电压正常指示灯LED2却正常发光.当电池电压低于或等于13 V时,VZ2截止,VT3正偏导通,电流经C3触发V3导通,充电回路又连通,同时C3也被充电.

图6 太阳能跟踪机器人系统流程图
3 太阳跟踪系统软件设计
机器人在运动过程中,照射到太阳板电池的角度发生变化,太阳能跟踪控制装置有两个自由度,通过控制方位角步进电机控制着太阳能电池板在水平方向上转动,通过控制高度角步进电机控制太阳能电池板垂直方向的转动.使太阳能电池板自动正对太阳光,提高太阳能的利用效率.其系统流程图如图6所示.
4 调试
太阳跟踪指的是在太阳照射过程中受光面跟太阳光线始终趋于垂直,以在有限的使用面积内收集更多的太阳能[7].除了提高太阳光电池本身的转换效率和提高蓄电池充放电效率外,太阳跟踪是太阳光伏发电系统中另一种提高转换效率的有效手段.实验表明精确的太阳跟踪可使太阳能利用率大大提高.
图中α为太阳板电池与太阳光的角度.由图可得相同的外界情况下,α越大,太阳板电池越正对太阳光,太阳能输出功率越大,因此增大光伏电池的光照强度就可以增大光伏电池的输出效率.由图可以看出太阳光的光照强度不同时,太阳能电池的输出特性有较大的改变.
5 结束语
本文设计的太阳能自动跟踪机器人能够追踪太阳方位角,使光伏发电系统获得最大输出功率.本系统具有适用范围广、工作稳定可靠和免维护等优点,具有较为广泛的应用前景.太阳能发电技术在新农村建设中的推广应用,对于促进经济社会可持续性发展和我国正在实施的节能减排都具有长远的意义[2].
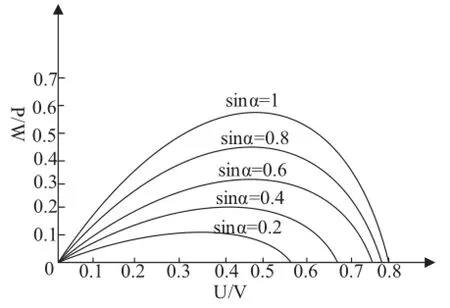
图7 不同角度的太阳能电池功率特性曲线
[1]Sefa I,Dem irtas M,Colak I.App licat ion of one ax is sun track ingsystem[J].En ergy Convers ion and Managemen,2009,50(11): 2709-2718.
[2]王雪文.太阳能电池板自动跟踪控制系统设计[J].西北大学学报(自然科学版),2004,34(2):163-164.
[3]帅麒,朱华.太阳能光伏组件在不同跟踪方式下的发电量比较[J].中国高新技术企业,2009(4):136-137.
[4]饶鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J].控制工程,2004(5):542-543.
[5]马健,向平.高精度太阳位置算法及太阳能发电中的应用[J].新技术新工艺,2008.
[6]Shen Chao,He Yaling,LiuY inwen,et al.M odell ing and s imu lation ofsolar radiat ion data p rocess ing with S imu link[J].Simulat ion Modelling P ractice and Theory,2008,16(7):721-735.
[7]刘四洋,伍春生.主动式双轴太阳跟踪控制器[J].可再生能源,2007,25(6):69-72.
The Design of the Solar Automatic Tracking Robot
FEI Min,MAO Li-min,ZHANG Li-jun,LU Yu-min
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
This paper presents a microcontroller AT89S52-based dual-axis solar tracking robot design methodology by making full and efficient use of solar energy.The method is based on tracking sensor for tracking components, judging whether the solar panels are vertical to sunlight,and at the same time the panels can be adjusted by the control system dual-axis tracking device.The experiments show that the robot is running stably,that the tracking efficiency is relatively high,and that it has a high practical value.
solar energy;dual-axis tracking;robot
TP23
B
1008-2794(2012)04-0069-04
2012-03-16
校青年教师科研启动项目“粒子滤波算法在FPGA中的研究”(QZ1101);江苏省大学生实践创新训练计划项目“太阳能自动跟踪机器人的设计”(S1135)
费敏(1989—),男,江苏靖江人,常熟理工学院电气与自动化工程学院2008级学生.
毛丽民(1981—),男,江苏常熟人,讲师,硕士,研究方向:机器人与目标跟踪研究.
猜你喜欢
莆田学院学报(2021年5期)2021-11-13
小天使·一年级语数英综合(2021年8期)2021-08-17
甘肃科技(2020年20期)2020-04-13
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
电测与仪表(2016年1期)2016-04-12
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
少年科学(2015年6期)2015-07-01
电子设计工程(2014年8期)2014-02-27
