
变速恒频双馈风力发电机的最大风能追踪控制
2012-04-27 09:53姚兴佳韩嵩崟赵希梅郭庆鼎
电气传动 2012年7期
姚兴佳,韩嵩崟,赵希梅,郭庆鼎
(1.沈阳工业大学 风能技术研究所,辽宁 沈阳110023;
2.沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
变速恒频双馈风力发电机的最大风能追踪控制
姚兴佳1,韩嵩崟1,赵希梅2,郭庆鼎2
(1.沈阳工业大学 风能技术研究所,辽宁 沈阳110023;
2.沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
为了最大限度的利用风能,提高风力发电系统的效率,提出了一种不依赖于风速测量的最大风能追踪和转换策略。通过模糊逻辑控制器的设计得到低风速时发电机的参考转速,模糊自适应控制器作为直接转矩控制系统速度调节器的基本组成单元,从而使发电机转速跟踪风速。最后,利用Matlab软件对1MW双馈型风电机组的运行性能进行了分析和比较。仿真结果表明,在风速变化时,控制器可以使发电机转速跟踪最佳理论值,系统性能稳定,达到了预期的控制目标。
最大风能追踪;模糊逻辑控制器;模糊自适应控制器;直接转矩控制系统;速度调节器
1 引言
到目前为止,为了提高风力发电机组的效率和改善风电的质量,大量的研究都集中在额定风速以下来提高风能利用系数。目前主要方法有叶尖速比控制,爬山法和功率信号反馈控制[1]。因为作为叶尖速比控制的输入信号是风机的转速值和风速值,并且都要给定,最优叶尖速比可以通过实验或计算的途径获得,虽然此方法有1个PI控制器就可以达到要求,控制过程相对简单,但是要求到达风机上的风速值要准确,由于风速随机性的特点,要想测得到达风机上的风速值是很困难的且叶尖速比的最优值在不同的系统中也不一样,因此在实际控制中采用叶尖速比控制方法较为困难[2];爬山法的控制原理是通过实时测量风轮的转速和输出机械功率,发电机的转速利用经典数学寻优的方法来调节使其跟踪最大功率点,此方法虽然解决了测量风速不准确的问题,但缺点是比较依赖风机的参数,因而参数的准确性很大程度的关系到控制效果;功率信号反馈控制则需要查表,即需要找出风机转速和最大功率之间对应的关系,该控制方法大多数还需要附加额外测量风速的设备,用风速代替转速,目前有些功率控制器采用了模糊控制,利用参考功率轨迹的思想调节控制系统的输出功率,有些则利用神经网络控制来记录并修正风机的转速和参考功率之间的关系,但是此方法最大的不足是要想找到风机转速和最大功率之间的准确关系是非常困难的[3-4]。
为此,针对以上算法的不足和缺点,本文提出一种不依赖于风速测量就可实现最大风能追踪的控制策略,即根据双馈发电机的特性,运用模糊逻辑控制的方法设计控制器,从而得到低风速时发电机的参考转速,实现了在无风检测下保持最佳叶尖速比运行。再利用模糊自适应控制器作为直接转矩控制系统速度调节器的基本组成单元,使发电机转速跟随风速的变化而变化,从而追踪最大风能。
2 风力机最大风能捕获原理
根据贝兹理论,风机吸收的机械功率和气动转矩为

式中:Pr为风轮吸收的机械功率;Tm为风轮的气动转矩;ρ为空气密度;vω为上风向的风速;Cp为风力机的功率系数,不是常数,是叶尖速比λ和桨叶节距角β的函数,贝兹理论的极限值为59.3%,λ=ωmR/v;ωm为风力机机械角速度;R为风轮半径;CT为气动转矩系数。
在式(2)中,Tm为风轮上的机械转矩,假定T为低速轴侧的转矩,Te为发电机电磁转矩。则双馈风力发电系统的运动方程如下:

将以上两式转化成高速轴侧的转速得

式中:A=γ2/J;在机组运行过程中,由于B,K受多种因素的影响,因此ai(i=1,2,3)为时变系数[5]。
图1显示了不同风速下风力机的输出功率特性曲线,其中v1>v2>v3,Popt曲线是不同风速下风力机最大输出功率点的连线,称为最佳功率曲线。从图1中可以看出,要想实现最大风能追踪,就需要相应的控制策略,使风力机运行在最佳功率曲线上,而在相同的风速下,不同的转速会使风力机输出不同的功率,但是输出功率仅存在唯一的最大值,其对应的风机转速为最优转速,因此,要想达到最大风能追踪的目的,必须在风速变化时实时地调节电机转速,使风力机运行在最佳功率曲线上。但是在实际的风场中风速的测量是非常困难的,因此找到一种不依赖于风速检测的方法具有很重要的意义[6]。

图1 风力机的功率-转速曲线Fig.1 Power-speed curves of wind turbine
3 双馈风力发电机组控制策略
在低风速时,保持桨距角β=0不变,机组不受功率上限的限制,所以控制目标是尽可能多的追踪风能。基本方法是检测风速,再根据机组最佳叶尖速比来设定发电机转速,这是变速恒频风电机组的优势所在。但是由于实际风场环境的复杂性,基于风速计测量进行的转速和功率调节通常是不精确的,因此,本文提出由模糊逻辑控制方法设计控制器,从而可以得到发电机的参考转速,再由自适应最优模糊控制方法求得发电机的电磁转矩指令,最后,由基于转子磁链定向的直接转矩控制方法来控制发电机的电磁转矩,使发电机的转速跟随风速的变化而变化,从而实现变速恒频风力发电机组的最大风能追踪。图2是低风速时风力发电机最大风能追踪控制系统框图。

图2 低风速时风力发电机组控制系统Fig.2 Wind turbine control system at slow wind speed
3.1 参考转速模糊推理控制
目前许多风力发电机组控制系统中,根据风速仪测得的风速信号调节风轮转速。由于风速在整个风轮旋转平面上分布不同,而且受湍流、塔架等因素的影响,测量风速是不精确的。本文提出利用模糊逻辑推理控制的方法得到发电机的参考转速,实现无风速测量下最大风能追踪,此控制方法可通过实时改变发电机转速增量,同时检测功率变化来感知风机当前工作点,从而确定新的转速增量,通过这样的搜索,使工作点最终稳定在当前风速下的功率曲线极值点附近,因此,模糊控制器的输入量为有功功率及其增量ΔP(k-1)=P(k-1)-P(k-2),高 速 轴 转 速 及 其 增 量Δωe(k-1)=ωe(k-1)-ωe(k-2),输出量为发电机在额定风速以下时的参考转速增量Δωref(k)。由参考转速增量可以得到参考转速为ωref(k)=ωref(k-1)+Δωref(k)。输入输出变量正规化以后可划分成7个模糊集:负大(NL)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PL)。依据经验知识建立模糊规则表:如果前一个转速(正或负)增量使机组输出功率正增长,那么参考转速保持与前一个转速增量相同的增长方向,否则,参考转速的增长方向与之相反。模糊规则表见表1。

表1 模糊规则表Tab.1 Rule list of fuzzy controller
模糊逻辑控制可以得出参考转速值,使风力发电机组在给定风速下获得最大风能,但是如果参考转速变化太大就会引起机组运行到最优点时发生振荡,在这种情况下可以通过调整模糊逻辑系统的量化参数、模糊划分和隶属函数获得合适的参考转速增量[7]。
3.2 自适应最优模糊控制
由于模糊自适应控制对参数变化和环境变化不灵敏,能用于非线性和多变量复杂对象,而且收敛速度快,鲁棒性好,并且可以在运行过程中不断修正自己的控制规则来改善控制性能[8],因此可以运用在风电系统中,而本文使用基于模糊聚类算法的模糊自适应控制方法来设计控制器。基于模糊聚类算法的模糊自适应控制指的是对于样本中的每一个输入-输出数据对来说,系统要以任意精度拟合到这些数据对的模糊逻辑控制。对于这样的大样本问题,可采用最近邻聚类方法对数据对进行分组,使每一组数据对应用于模糊逻辑系统的一条规则,从而减少系统的规则数目,使系统仍能以任意精度拟合样本数据对[9]。模糊自适应控制器作为风力发电机组速度调节器的基本组成单元,控制器由2部分组成:一个辨识器和一个控制器。辨识器用模糊自适应函数f来逼近闭环系统的未知非线性函数g,然后再把f复制到控制器中。式(5)离散化得:

参考转速模糊推理控制得到ωref(k+1),代入式(6):

这里的g(*)是未知的,通过自适应最优模糊逻辑辨识g(*),电磁转矩指令控制为

式(8)得到发电机的电磁转矩指令,然后由直接转矩控制技术直接控制发电机的电磁转矩。
3.3 双馈发电机的直接转矩控制
双馈发电机的直接转矩控制是通过控制转子磁链速度来控制电机转矩,进而控制发电机的输出功率。在转子坐标系上建立它的数学模型,定子绕组直接接电网,使定子磁链基本上保持恒定。双馈发电机的直接转矩为

其中,Ψrα,Ψrβ,irα,irβ是由测得的转子电流、电压经3/2坐标变换求得的。直接转矩控制是通过查表来实现的,由磁链与转矩的滞环调节器输出来决定逆变器的开关状态的选择。一旦开关状态被估计出,相应的电压矢量加在转子侧,将会改变转子磁链。电压矢量的切线分量决定转矩,径向分量决定磁链的幅值[10]。双馈电机直接转矩控制系统原理如图3所示。

图3 双馈电机直接转矩控制系统原理框图Fig.3 Schematic diagram of DTC system of DFIG
图3中的双馈电机直接转矩控制系统由3个闭环结构组成,外环控制发电机转速,内环则是同时实现转子磁链和电磁转矩的控制。通过转速反馈的信号与转速参考值比较的偏差,经过速度调节器,输出转矩指令信号T*e;速度调节器的输出转矩指令信号T*e与实际电磁转矩Te相比较的偏差通过三电平滞环比较器后,输入到电压矢量查询表,最后经过运算得出转矩电流分量iD,由此来控制双馈电机的转矩,从而控制了转速使其捕获最大风能。
4 系统仿真与结果分析
本文使用Matlab/Simulink软件对该方案应用于水平轴、上风向、3叶片的双馈型风电机组系统SUT-1000进行仿真研究,仿真系统中的风速模型采用了随机风模型,并仿真出在此风况下发电机转速、电磁转矩和机械转矩的变化情况、转子磁链轨迹。并通过仿真结果验证了控制器的最大风能追踪能力。仿真参数见表2。

表2 1MW机组的设计参数Tab.2 Simulation parameters of 1MW wind turbine
图4为仿真中的随机风速变化曲线。从图5中可以看出在风速变化的情况下,控制器可以改变电机的转速并经过短暂的调整之后,实际转速与最佳理论转速基本吻合,并跟踪风速的变化,具有很好的动态性能,因此本文所提方案能够实现无需检测风速下的最大风能追踪。图6为发电机电磁转矩与风力机机械转矩曲线,风力机的电磁转矩经过变化后逐渐和机械转矩重合,使风力机在一定风速v下的风能利用效率最高,表明了双馈风力发电机组能很好地实现最大风能追踪控制。图7的转子磁链轨迹接近于圆形旋转磁场,脉动小,说明了直接转矩控制不需要观测转子磁链的方向和大小,受电机参数变化的影响小,证明了直接转矩控制效果理想。
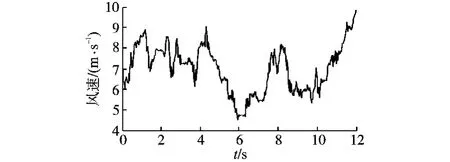
图4 随机风速曲线Fig.4 Random wind speed curve

图5 发电机转速曲线Fig.5 Generator rotational speed curve

图6 发电机输出转矩与风力机输出转矩Fig.6 Curves of generator torque output and turbine torque output

图7 转子磁链轨迹Fig.7 Flux track of rotor
5 结论
对1MW风电机组进行的仿真运行结果表明:在低于额定风速的条件下,本文提出的控制策略均取得了比较满意的控制效果,实现了变速恒频风电机组在不需要测量风速的情况下就可以对发电机转速进行有效的控制,控制器鲁棒性能好,并且可以灵活、有效地调节发电机输出有功功率,从而达到了最大风能捕获的目的,提高了低风速下风电系统的运行效率。
[1] 刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪[J].电力系统自动化,2003,27(20):62-67.
[2] Rajib Datta,Ranganathan V T.A Method of Tracking the Peak Power Points for a Variable Speed Wind Energy Conversion System[J].IEEE Transactions on Energy Conversion,2004,18(1):163-168.
[3] Tang Yifan,Xu Longya.A Flexible Active and Reactive Power Control Strategy for a Variable Speed Constant Fre-quency Generating System[J].IEEE Transactions on Power Electronics,1995,10(4):472-478.
[4] 高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京:清华大学出版社,1993.
[5] Slootweg J G,Kling W L,Polinder H.Dynamic Modelling of a Wind Turbine with Doubly Fed Induction Generator[J].IEEE Power Engineering Society Summer Meeting,2001,1(3):644-649.
[6] 叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002.
[7] 张新房,徐大平,吕跃刚,等.大型变速风力发电机组的自适应模糊控制[J].系统仿真学报,2004,16(3):573-577.
[8] 王立新.自适应模糊系统与控制-设计与稳定性分析[M].北京:国防工业大学出版社,1995.
[9] Chen Z,McCormick M.A Fuzzy Logic Controlled Power Electronic System for Variable Speed Wind Energy Conversion Systems[C]∥IEEE Power Electronics and Variable Speed Drivers,Conference Publication,2000:114-119.
[10]李珍国.交流电机控制基础[M].北京:化学工业出版社,2009.
修改稿日期:2012-02-15
Maximum Wind Power Tracking Control of Variable Speed Constant Frequency Doubly-fed Wind Turbines
YAO Xing-jia1,HAN Song-yin1,ZHAO Xi-mei2,GUO Qing-ding2
(1.WindEnergyInstitute,ShenyangUniversityofTechnology,Shenyang110023,Liaoning,China;2.SchoolofElectricalEngineering,ShenyangUniversityofTechnology,Shenyang110870,Liaoning,China)
For maximal utilizing wind power,improving efficiency of wind power generating systems,a method and conversion strategy that is not dependent on detecting wind speed was proposed.It designs a fuzzy logic controller that obtains reference rotation of generator below rated wind speed,fuzzy adaptive controller is the basic constitute unit of direct torque control system speed regulator,and the rotation of generator may track wind speed quickly.At last,the proposed method is simulated with Matlab based on 1MW doubly-fed wind turbine prototype.The simulation results show that when changes in wind speed,actual rotation speed of generator tracks optimal oretical value quickly,performance of system is stable,reaching the prospective target of control.
maximum wind power tracking;fuzzy logic controller;fuzzy adaptive controller;direct torque control system;speed regulator
TM614
A
国家“863”支撑计划项目资助(2006BAA01A03)
姚兴佳(1948-),男,教授,博士生导师,Email:great1717@126.com
2011-06-21
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
测控技术(2018年5期)2018-12-09
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年16期)2015-04-12
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
