基于矢量变频技术的异步电动机调速系统建模及仿真分析
2012-05-27 02:51吕明
湖南工程学院学报(自然科学版) 2012年2期
吕 明
(蚌埠学院,蚌埠 233030)
0 引 言
近年来随着电力电子学的飞速发展,使得各类电力电子元器件朝着大容量、高频率、易驱动、低损耗、智能化及模块化的方向发展,从而使得交流变频传动技术得以迅猛发展.同时基于新型电力电子元器件的创新与发展,以及先进控制理论的不断提出和完善等原因,使交流变频调速器在调速范围、调速精度、动态响应及驱动能力等方面的优越性极大的超越了其他常规交流调速方式.建立精确、有效的交流异步电机控制系统数学模型对于变频调速技术的广泛推广具有重要意义.
本文论述了异步电动机矢量控制原理,推导了异步电机矢量变频调速基本方程,说明了其算法,由此建立了异步电机在旋转坐标系下的矢量数学模型,基于Matlab软件的Simulink模块对矢量调速系统的数学模型进行了仿真,给出了仿真结果.通过分析仿真行为及其结果,确认了本系统模型设计的正确性、准确性及可行性.
1 异步电动机矢量控制原理
异步电机矢量控制理论的核心思想是通过坐标变换的方法,将异步电动机模型模拟成直流电机模型,分解定子电流,使之成为能独立控制的分别跟转矩和磁场有关的两个分量,实现正交解耦控制,通过同时对转矩、磁场分量的幅值和相位进行控制,即控制定子电流矢量,所以称该控制方式为矢量控制方式[1~2].
2 异步电机矢量变频调速系统动态数学模型基本方程
异步电机的数学模型比较复杂,根据在研究异步电机多变量非线性数学模型时的假设[3],经过三相静止-二相静止及二相静止-二相旋转等一系列等效数学坐标变换,异步电机的动态数学模型可通过电压方程、磁链方程、转矩方程和电力拖动系统运动方程表述.
(1)异步电机电压方程
经等效坐标变换,可得出三相定子绕组的电压平衡方程为:

(2)异步电机磁链方程
通过等效坐标变换可发现,每个绕组的磁链是其自感磁链和其他绕组对它的互感磁链之和,因此,6个绕组的磁链方程可表达为:

或写成:ψ=Li
式中:L——6×6电感矩阵
LAA、LBB、LCC、Laa、Lbb、Lcc——各绕组的自感;其余各项为各绕组间的互感;
(3)异步电机转矩方程
由机电能量转换原理及考虑到电感的分块矩阵关系,可得到异步电机的转矩方程:

式中,np为极对数,Lm为定子和转子之间的互感,θ为a轴与定子A间的电角度差,也叫空间角位移[4~5].
(4)异步电机电力拖动系统运动方程
在忽略电力拖动系统中阻转矩阻尼和扭转弹性转矩的前提下,运动方程不受坐标变换的影响.因此电力拖动系统的运动方程可表示为:

式中:Tg——电动机电磁转矩
TL——电动机负载转矩
J——机组的转动惯量
np——极对数
ωr——转子转速
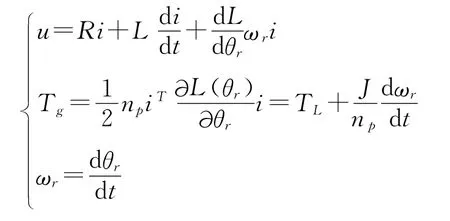
由异步电机的电压方程、磁链方程、转矩方程和电力拖动系统运动方程可得三相异步电动机的多变量非线性数学模型异步电动机的动态数学模型:
3 SVPWM仿真模型
SVPWM是空间矢量脉宽调制(Space Vector Pulse Width Modulation)的简称.SVPWM控制技术是从电动机的角度出发,以跟踪圆形旋转磁场为目标来控制逆变器的输出电压,通过在正弦波与三角波交点处来控制电力电子功率器件的开通与关断,使电机获得幅值恒定的圆形磁场,以此生成SPWM波形的方法,即正弦磁通轨迹控制.本系统采用磁链闭环、转差频率型矢量控制方式.利用Matlab软件下的Simulink模块环境,通过Sim Power-System Toolbox中丰富的模块库[6~7],在分析异步交流电机空间矢量控制系统动态数学模型的基础上,采用功能子模块的形式分块建模,最后组合成整体,建立该控制系统整体的仿真模型,其总体结构框图如图1所示.

图1 系统总体框图
4 仿真结果与分析
为了验证该调速系统的动态响应,根据仿真系统结构原理图,通过调节各个模块的参数设置,对三相异步电机进行整体系统仿真实验.具体参数设置如下:基本额定功率0.8kW,每相线电压380V;额定频率50H,每相定子电阻3.95Ω,每相转子电阻3.55Ω,定子电感39.5mH,转子电感35.5mH,定子/转子互感32.5mH,极对数为2.其仿真结果如图3所示.
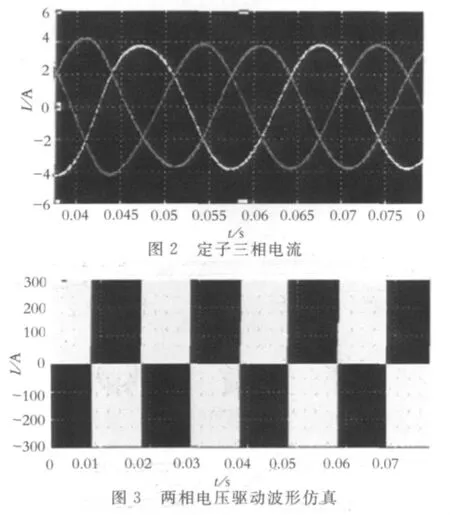
从图2、图3的仿真波形图可以得出,该基于矢量变频技术建立的三相异步电动机调速系统数学模型具有良好的适应性,电机的电压和电流波形与直流电机的控制波形类似.结果表明,基于 Matlab/Simulink环境的交流异步电机矢量控制的仿真系统符合理论分析,该系统的动静态性能良好,且系统运行稳定.
5 小 结
本文在传统的变频控制基础上,通过矢量变频技术建立了三相异步电机调速系统的数学模型,并依此采用Matlab/Simulink进行仿真.根据仿真结果分析,表明本文所建立的动态数学模型合理有效,所设计的仿真模型简单,性能优良,响应速度快,抗干扰性好,并且可根据实际使用情况,对调速系统的参数进行相应修改,从而实现高效的系统设计.
[1]邓启文,尹力明,佘龙华,吴 峻.用SVPM调制模式实现定 V/F变频调速.中小型电机,2003(2):30-33.
[2]Vanja,Ambrozic,Rastko,Fiser,David,Nedeljkovic.Direct Current Control——A New Current Regulation Principle[J].IEEE Transactions on Power Electronics,JANUARY,2003,18(1):495-503.
[3]谭弗娃.电机拖动与基础[M].上海交通大学出版社,2002.
[4]白 晶.交流异步电动机变频调速控制策略的研究[J].电气传动自动化,2003,25(5):22-25.
[5]王晓明,王 玲.电动机的DSP控制[M].北京航空航天大学出版社,2008.
[6]Hoang Lehuy.Modeling and Simulation of Electrical Drives Using MATLAB Simulink and Power System Blockset[J].Proceedings on Indus-trial Electronics Society,2001(3):1603-1611.
[7]Butler K L,Ehsani M,Kamath P.A Matlab-based Modeling and Simulation Package for Electric and Hybrid Electric Vehicle Design[J].IEEE Trans.on Vehicular Technology,1999,48(6):1770-1780.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
中学数学杂志(初中版)(2016年5期)2016-11-01
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年10期)2014-03-01