
驾驶室航行值班报警系统的设计
2012-07-06 10:01黄晓中
上海海事大学学报 2012年1期
黄晓中
(上海融德机电工程设备有限公司 研发部,上海 200135)
0 引言
根据国际海事组织(International Maritime Organization,IMO)海上安全委员会(Maritime Safety Committee,MSC)2002 年5 月20 日通过的MSC.128(75)决议《驾驶室航行值班报警系统(Bridge Navigational Watch Alarm System,BNWAS)执行标准》,设计和生产BNWAS.该系统的目的是检测驾驶室的活动,当发觉操作人员能力丧失、值班驾驶员(Officer Of Watch,OOW)意识状态降低或当该值班人员因某种因素未履行值班员职责可能导致航海事故时,系统可自动通过指示灯和警报声及时提醒船长或其他胜任的值班人员,如大副、二副或三副.此外,BNWAS 还配备让值班人员通过应急呼叫得到及时援助的设施.[1]
BNWAS 完全符合IMO 的MSC.128(75)决议《驾驶室航行值班报警系统(BNWAS)执行标准》、IEC 62616-2010《驾驶室航行值班报警系统》、IEC 60945-2002《海上导航和无线电通信设备及系统/一般要求/测试方法和要求的测试结果》的规定.
相对于陆用工业设备而言,船用测控设备系统必须具有更高的抗干扰能力、可靠性、安全性,相关船舶规范要求的型式认可测试也更为严格.
1 系统主要功能
BNWAS 授权船长通过面板上的钥匙开关选择工作模式,分别为运行、待机和自动.所谓自动即自动受控运行,当船舶上的航向或跟踪控制系统运行时,可自动停止运行BNWAS;而在船舶上的航向或跟踪控制系统停止工作时,自动运行BNWAS.
BNWAS 指示和报警的运行顺序见图1.图中Tdx为选择的休眠期.
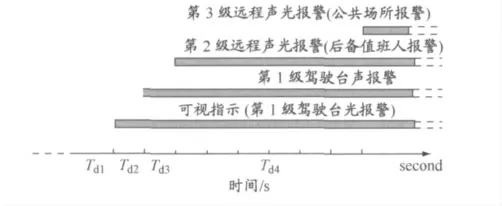
图1 BNWAS 指示和报警的运行顺序
图1中,当BNWAS 处在运行状态,被复位后维持3~12 min 的休眠期(Td1),在该休眠期结束时,报警系统将触发置于驾驶台的可视指示(即第1 级光报警).
BNWAS 在该可视指示触发15 s(Td2)后在驾驶台发出第1 级声报警.第1 级声报警旨在提醒OOW,设计中让声报警具有音量渐响和声调调节特性,使OOW 在不受到惊吓的情况下得到提醒.该报警声能在驾驶室OOW 合理预期应处于的所有操作位置听到.如果第1 级声报警15 s(Td3)后还没有被应答(复位),则在后备值班员处再发出第2 级声光报警,后备值班员包括船长或其他胜任的值班人员,如大副、二副或三副.如果第2 级声光报警后仍没有被应答,90~180 s(Td4)后,系统将在能够采取正确处置措施的船员场所(公共场所)再发出第3级远程声光报警.[2]
2 系统结构
本系统以主控制单元为核心,通过船用电缆连接系统各功能单元,见图2.
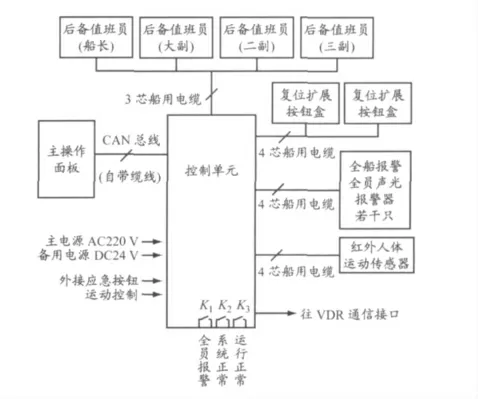
图2 BNWAS 结构
2.1 主控制单元
主控制单元安装在驾驶室内,接有两路系统电源:分别是主电源AC 110/220 V 及船用蓄电池提供的备用电源DC 24 V,系统具备电源自动切换功能.主控制单元除了连接系统各功能单元外还设有连接船用黑匣子(VDR)通信接口、红外人体运动传感器、延伸应急按钮及运行控制等信号输入口.
2.2 主操作面板
主操作面板安装在驾驶室上值班驾驶员伸手可及之处,提供一系列的按钮和指示灯用于人机交互.值班员选择、运行状态指示、各类报警灯及计时值数码显示表明当前的运行状态.此外,面板上配备有[复位]按钮和[应急呼叫]按钮,按下[复位]按钮系统进入休眠期,并重新开始计时,已发生的报警则全部停止;[应急呼叫]按钮按下后直接触发第1 级声光报警,5 s 后引发第2 级声光报警,继续计时引发第3 级声光报警.为了防止[应急呼叫]按钮误操作,还设计5 s 后悔期(其间再次按动[应急呼叫]按钮可解除应急呼叫状态).
面板上的钥匙开关由船长掌管,用于控制系统启动、停止或对运行中的各项参数进行设定.可设定的参数包括当前的备用值班员、操作模式、休眠期和声调等.设定后的参数被存储记录在主控制单元的Flash ROM中予以保护.
2.3 复位扩展按钮盒
复位扩展按钮盒安装在与主操作面板有一定距离的驾驶室内适合观察和操作的地方,便于驾驶员在较大面积驾驶室内也能就近操作.根据需要,可选择配备一到两只复位扩展按钮盒,其复位按钮和声光报警器功能与操作面板相同.
2.4 后备值班员报警盒和全员声光报警器
这些报警盒(报警器)分别安装在4 位后备值班员(船长、大副、二副、三副)房间和公共场所(如会议室、食堂及公共走道),当第2 级报警发生时,选定的后备值班员房间的报警盒将发出相应的警报,而当第3 级报警发生时全部报警单元一起动作.
3 系统设计
在抗干扰能力、可靠性、安全性等方面船用测控设备比陆用工业设备要求更高,而驾驶室设备更有其特殊之处.根据船舶规范要求必须通过型式认可,测试主要包括:系统功能测试以检验系统的功能要求是否达标;电磁兼容性试验包括磁罗经安全距离、传导发射、静电放电抗扰度等十几项,用于检验系统的抗电磁干扰能力,避免系统对外电路实施干扰;环境试验和外壳防护等级试验用于检验环境温度对系统的影响及系统机械结构是否牢固.[3]
兼顾上述使用性能和电磁兼容及抗干扰能力、系统可靠性、安全性的要求,对系统各部分采取如下有针对性的设计.
3.1 结构设计
由图2可以看到BNWAS 的控制核心实际是由主操作面板的人机交互操作和主控制单元对扩展单元的I/O 控制两部分构成的.相对于安装在金属壳体内的PCB 板卡而言,各部分之间的连接线缆是干扰源的主要输入途径,想要提高系统的电磁兼容性能,关键在于电源的抗干扰和各部分连接线的光电隔离.本设计放弃传统的易受电磁干扰影响的信号线连接方式,采用主、副CPU 硬件结构,两者之间采用光电隔离的CAN 现场总线相连接.
主操作面板中的CPU为副CPU,其功能主要是人机对话:把采集面板上按键及锁开关状态送往主CPU,同时根据接收到的主CPU 发来的信息进行各项显示和报警.副CPU 还不断检测CAN 总线状态及按键状态,当总线异常或按键长时间不应有的接触时发出报警.主控制单元中的主CPU 除了与副CPU 交换信息外,主要是根据BNWAS 的报警运行顺序进行报警输出处理和对系统运行状态的检测,并按通信协议标准把有关信息随时发往其他船用设备(例如VDR).
主CPU 选用NXP 公司的ARM7 TDMI-S 核单片机LPC2368,该芯片功能强大、集成度高,并可提供多达4个串口、IrDA 接口、USB Device 接口、2个CAN-bus 接口、SD/MMC 卡接口、MODEM 接口、以太网接口等.[5]根据需要,本系统使用其局部功能,见图3.
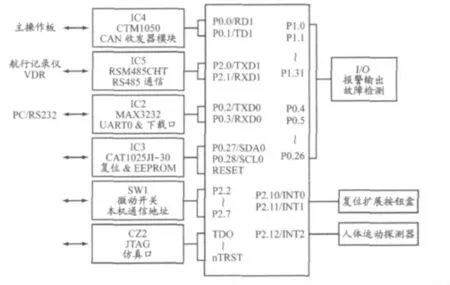
图3 主CPU 接口分配框图
单片机LPC2368 的RD1/TD1 口接CAN 收发器用于与主操作面板的辅CPU 通信,而TXD1/RXD1和TXD2/RXD2 两个串行口分别接到RSM485CHT和MAX3232 电平转换芯片.前者为带光电隔离的RS485 通信总线接口,用于连接航行记录仪或其他外设;后者为RS232 通信接口,可作为近距离PC 机通信或作为下载口使用.[6]复位电路使用带Flash存储器的电源监控芯片CAT1025JI-30,在提高系统可靠性的同时保存设置的参数.INT0/INT1和INT2中断口分别用于远程复位信号和(红外)人体运动探测器信号,当系统接收到复位脉冲时触发一段复位处理程序,系统进入休眠期,重新开始计时.
3.2 现场总线
现场总线技术是当前自动化技术的热点之一.作为符合国际标准的现场总线之一,CAN-bus 已在世界范围内获得广泛应用.
本系统的主、副CPU 之间使用CAN 总线连接.所选用的CPU 单片机LPC2368 其自身集成一个完整的CAN(遵循CAN 规范V2.0B 协议)控制器,具有强大的诊断监控功能,并在很大程度上简化器件编制难度.考虑到现场电磁环境的复杂性,为确保通信可靠,选用CTM1050 作为本系统的CAN 收发器芯片.CTM1050是一款带隔离的高速CAN 收发器模块,该模块内部集成了所有必需的CAN 隔离及CAN 收、发器件,模块的主要功能是将CAN 控制器的逻辑电平转换为CAN 总线的差分电平并且具有DC 2 500 V的隔离功能.该芯片还有电磁辐射EME低、电磁抗干扰EMI 性高和高低温特性好的特点,能满足工业级产品技术要求.[7]
具体的主控单元和操作面板连接见图4.主、副CPU 芯片LPC2378 的RD1和TD1 口分别接到各自的CTM1050 收发器芯片上,并在输出口CANH和CANL 之间配备可选用的120 Ω 终端阻抗匹配电阻,而收发器的屏蔽地则通过1M 电阻和103 pF 电容接外壳地,两个CPU 之间使用带屏蔽的通信电缆相连,通信电缆屏蔽层同样接外壳地.在现场安装时要求所有的外壳地必须使用3 mm2以上的专用接地线与船壳连接以获得最佳的电磁屏蔽效果.[8]
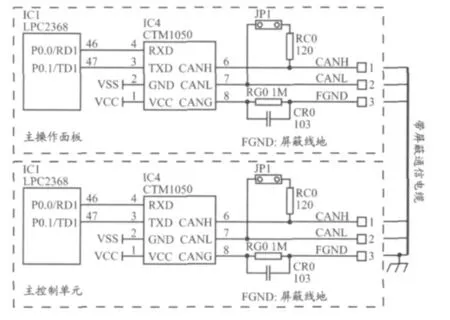
图4 主控单元和操作面板连接
在应用层协议方面,本系统选用近来国内常用的iCAN(Industry CAN-bus Application Protocol)协议,是现场总线CAN-bus 的最新应用层协议之一,具有理解简单、易于实现、实时可靠的特点.iCAN 协议采用与CANopen和DeviceNet 协议基本相同的连接管理方式,删除比较复杂的握手管理、资源分配等内容,并使用预定义数据组合的方式管理CAN-bus总线上的节点.定稿的iCAN 协议虽然只有DeviceNet 协议完整内容的1/10,但实现的iCAN 网络却比DeviceNet 网络的规模大,适应面比较广泛,应用方式也非常灵活,尤其适合各种不同工业环境条件中的分布式数据控制网络.[4]
一个典型的CAN 数据帧由帧信息、帧ID和帧数据组成.为方便起见,程序中接收和发送的数据都用一帧(CANINFO 结构体)表示.
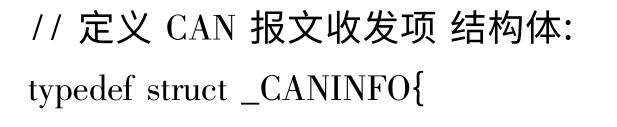
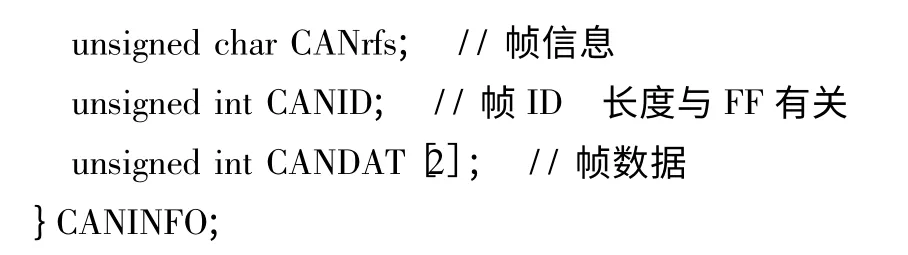

表1 CAN 标准帧结构
CANDAT为数据帧的数据区,每帧可收发8 字节数据,见表2.

表2 CANDAT 每帧发送的数据
3.3 电源和信号
本系统共有两路供电电源,分别来自船用发电机的主电源AC 110/220 V 及来自船用蓄电池的备用电源DC 24 V,要求系统对两路电源进行监控并有自动切换功能,当任一电源停止供给时系统会发出相应的报警提示.除了以上的供电保障功能要求外,船舶规范要求一系列电磁兼容性试验大多与电源相关,大致也可分为3 类:本系统通过电源导线对其他船用设备的干扰;模拟其他船用设备通过电源和信号线对本系统的影响;模拟雷击、断电、电源倒置、电压异常波动等情况.
兼顾各方面要求,系统电源电路设计增加相应措施,见图5.主电源AC 110/220 V 及备用电源DC 24 V分别先经抗干扰滤波器后接入系统,经由电源自动切换组件到达主控制单元.主控制单元电源入口处并联一个瞬态抑制二极管ZIN1.ZIN1是一种双向瞬态电压抑制二极管,用该器件吸收尖峰高压有很好的效果.而二极管VDIN1 用于限制电源的导通方向,经过L1,C1,C2 滤波,然后通过DC/DC 模块将电源隔离并稳压至5 V,专给CPU 及其接口芯片供电.本系统选用的DC/DC 模块具有输入电压范围大、输出过流保护、输出过压保护、输出电压精度高等功能.为了降低噪声和干扰,还将模拟电路的电源与数字电路的电源高频噪声进行隔离,图5中的L2,L3 及C5,C6 等就是用于电源高频隔离的元件.
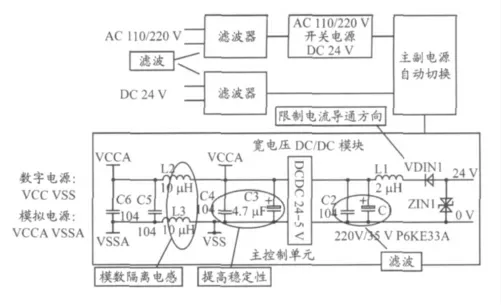
图5 系统电源框图
3.4 系统自检和故障报警
这是船用测控设备的高可靠性重要体现.为提高BNWAS 的抗干扰能力及可靠性,设计系统硬件时,主控制单元与外部扩展配件间的线路全部采用光电隔离,并设置断线检测的回路.系统根据光电耦合器的工作电流特性,利用稳压二极管击穿前电流微小、击穿后稳压的特点,来很好地解决外电路与主机之间既有电隔离又必须有外回路断线检测的难题.典型的接口电路见图6.
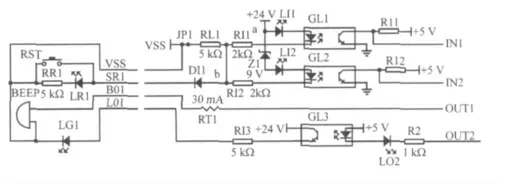
图6 [复位扩展按钮盒]与主机的接口电路
图6中,INT1和INT2 分别是检测断线信号和按键信号输入口,OUT1和OUT2 分别是声光报警信号输出口.左侧为[复位扩展按钮盒]内电路,右侧为主控制单元电路.
当复位键RST 未被按下时,断线检测电流从+24 V电源经LI1(LED 指示灯)(光电耦合器GL1输入端(RI1(DI1(LR1(RR1(VSS,回路电流IG10约为

式中:LI1,LR1 与GL1 的输入LED 管电压降均约1.6 V,而DI1 电压降为0.7 V.
具体表现在对单位实施内部控制的重要性和意义认识不足,认为内控把简单的事情复杂化,相关内控制度流于形式,缺乏可操作性。从而在实际工作中,仅认为财会人员工作就是收收付付,而没有参与单位的决策业务工作。财会人员无法提供相应的专业的意见和建议,无法为降低单位财务风险提供决策参考。
使光电耦合器GL1 输出管导通,INT0 输出低电平,通电指示灯(兼按钮夜间照明)LR1 亮;如果接口电路断开,此回路断路,通电指示灯LR1 灭,GL1输入端回路因断路而无电流通过,输出管截止,INT0 出现高电平表明接口电路断线.

此回路正常状态下a,b 两点间电压由于Vab约为8.4 V,光电耦合器GL2 回路上稳压二极管Z1(9 V)的串入,不能击穿,光电耦合器GL2,输入端无电流(极小电流)通过,INT1为高电平.
当按键按下后,由于按键短路LR1和RR1,Vab=24 V-0.7 V=23.3 V,稳压二极管Z1 击穿后稳压于9 V,按键电流从+24 V 经Z1→LI2(按键指示灯)→光电耦合器GL2 输入端→RI2→DI1→按键→VSS,光电耦合器GL2 输入电流.

光电耦合器GL2 输出管导通,INT1为低电平,表明按键按下,回路电阻的选择保证此时光电耦合器GL1 的输入电流应在工作电流范围内:

光报警信号由OUT2 输出,经光电耦合器GL3输出使LG1 亮,实现光报警输出.当系统未接此[复位扩展按钮盒]时,可把JP1 短接,使主控制单元不会因此产生不应有的断线故障信号.
3.5 红外人体运动传感器
为了简化驾驶人员的操作,系统还配备红外人体运动传感器复位信号输入接口,当有人员在驾驶室正常活动时,传感器对系统自动产生复位请求.
红外人体运动传感器无论是采用BOSCH 公司的DS936 型,还是DS939 型或DS940T 型,输出信号完全一样,工作模式均为:通电预热50 s 后,若未检测到人体运动,其输出触点闭合;若检测到人体运动,其输出触点断开;若检测到持续有人体运动,其输出触点断开但每隔5 s 闭合1 s.
若系统只外接一只红外人体运动传感器,则可把传感器输出触点一端接地,另一端接上拉电阻后由单片机LPC2368中断口INT2 口输入:那么INT2口为低电平(触点闭合)传感器工作正常,监测区无人活动;INT2 口为高电平,但每5 s 下降到低电平1 s则是持续有人体运动;INT2 长时间(大于5 s)持续处在高电平则是断路故障(因为传感器断线时输入信号线悬空).本系统充分利用单片微机INT2 口的输入特性(即输入信号持续为高或低电平不变时不会产生中断信号,但仍可读取的接口电平),用INT2 口的下降沿触发中断对系统自动产生复位请求,10 s(大于5 s)内读取的INT2 口电平始终为高电平则是断路故障,使传感器输出信号与CPU 获得恰到好处的配合.
在大型船舶上,一只红外人体运动传感器无法覆盖较大的驾驶室,为了节省CPU 的I/O 接口和软件开支,用多个传感器时采用触点串联方法,传感器触点信号输入前附加少量预处理电路:在任意一只传感器输出触点从断开态转向闭合的瞬间,该电路可在CPU 的INT2 口产生负脉冲,而且可在任意一只传感器断线故障时在该口上获得故障信息.
多个运动传感器的接口电路见图7.在图7中假定系统应用4 只红外人体运动传感器PM1~PM4,它们的4个输出触点PK1~PK4 串联在输入触点回路上,用LM317和RJ1 组成10 mA 恒流源向传感器触点回路供电,当4个输出触点处于某种稳定状态(或某几个断开、某几个闭合)时,Va值由流过电阻RP1,RP2,RP3和RP4中的某几个(触点闭合的被短路)的电压降值确定,而Vb=12 V·RJ3/(RJ2 +RJ3)≈1 V,c 点电压为Va与Vb的分压值,被电容CJ1 保持.出现以下情况会使CPU 的INT2口得到相应的电平或负脉冲信号:
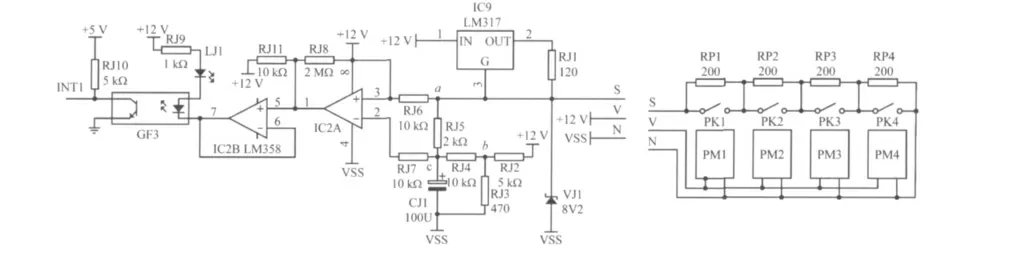
图7 红外人体运动传感器接口
(1)传感器电路断线.Va被稳压二极管限压在9 V,那么Va>Vc>Vb.经运算放大器IC2A 比较后,由IC2B 跟随器输出高电平,LJ1 灭,INT2 持续处在高电平而且无下降沿,则为断路故障.
(2)传感器电路接线正常,而监测区无人活动时,全部传感器输出触点闭合,Va=0 V,则Va<Vc<Vb.经运算放大器IC2A 比较后,由IC2B 跟随器输出低电平,LJ1 闪亮,INT2 持续处在低电平.
(3)监测区有人活动时,某个传感器输出触点处于断开状态,并且每隔约5 s 闭合一下,由于闭合瞬间Vc不会突变,Va产生2 V(10 mA ×200 Ω)的压降,使得Va瞬间小于Vc.经运算放大器IC2A 比较后,由IC2B 跟随器输出低电平脉冲,LJ1 闪亮,INT2 也输入低电平脉冲,触发单片机产生中断使BNWAS 复位.
上述附加电路巧妙地利用电容的电压不能突变,以保持原有几个传感器输出触点闭合时的状态电压,当某个传感器输出触点由断开状态转向闭合时,运算放大器两输入端瞬间产生差压,经比较输出低电平脉冲,以获得CPU 所需负脉冲信号,可解决多个传感器只需一个输入中断口INT2 的难题.
3.6 软件流程图(报警处理和时间精度)
MSC.128(75)决议对系统时间精度作了明确要求:“在使用情况下,报警系统应当能达到4.1.2 节中规定的计时要求:其精度为5%或5 s,以较小为好.”[1]本系统中,主CPU 程序的最主要程序是定时程序,主CPU 定时器每50 ms中断一次,除执行其他定时操作外,根据BNWAS 的不同计时阶段散转,进行计时后作出判断,并作相应处理.图8为主CPU定时程序主要流程.
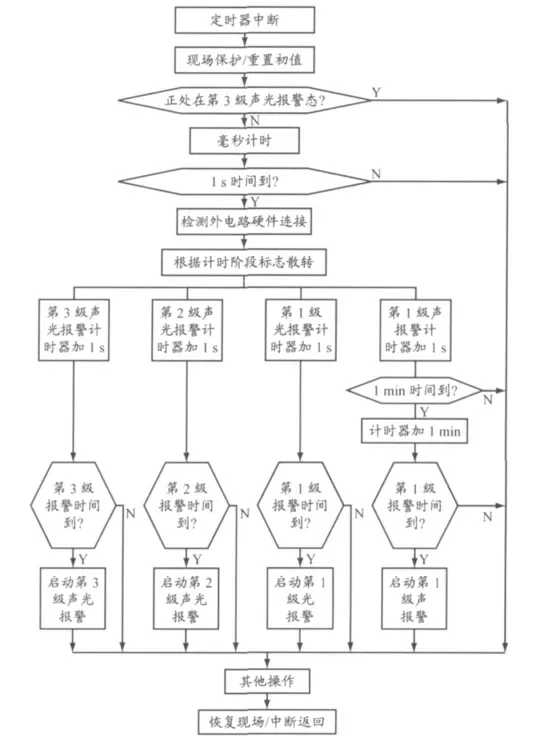
图8 主CPU 定时程序流程
4 结束语
所设计的BNWAS 在软件配合下,硬件上采取主、副CPU 结构,CAN 现场总线,电源设计和外部配件的光电隔离及故障检测,不但具有较高的抗干扰能力、可靠性及安全性,而且功能完善.
[1]IMO RESOLUTION MSC.128(75).Performance standards for a Bridge Navigational Watch Alarm System (BNWAS)[S].IMO:20 May 2002.
[2]IMO RESOLUTION A.1021(26).Code on alerts and indicators[S].IMO:18 January 2010.
[3]IEC 62616.Maritime navigation and radio communication equipment and systems-bridge navigational watch alarm system[S].IEC:2010(E).
[4]周立功.ICAN 现场总线原理与应用[M].北京:北京航空航天大学出版社,2007.
[5]周立功.ARM 嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2008.
[6]钟鸣泉,黄学武,郑华耀.基于ARM 微处理器的多串口多协议网关设备设计[J].上海海事大学学报,2008,29(1):62-66.
[7]毛兴武.新型电子元器件及其应用技术[M].北京:中国电力出版社,2010.
[8]夏永明,孔凡花,王洋,等.船用智能同步检测、指示、控制仪表[J].上海海事大学学报,2010,31(4):40-44.
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
轨道交通装备与技术(2021年5期)2021-11-19
电子测试(2021年9期)2021-06-17
电子制作(2021年9期)2021-06-17
军民两用技术与产品(2020年8期)2020-09-07
山东工业技术(2019年13期)2019-05-30
汽车维修技师(2018年7期)2018-12-07
山东工业技术(2017年18期)2017-09-12
汽车维护与修理(2017年17期)2017-02-07
核技术(2016年3期)2016-04-19
