
基于RBF神经网络的无刷直流电动机速度无关控制法
2012-07-23 06:36胡云宝曹闹昌王加祥
微特电机 2012年3期
胡云宝,曹闹昌,王加祥,王 瑛
(空军工程大学,陕西西安710038)
0引 言
无刷直流电动机具有结构简单、控制灵活、运行可靠等显著优点,在工业领域得到了广泛应用。但安装在电机内部的用于检测转子位置的传感器容易引入电磁干扰,同时限制了电机的小型化和其在恶劣环境中的应用。
无位置传感器控制技术不依赖于位置传感器,利用电机的相电压和相电流来观测转子位置,分析换相时刻,提高了系统的可靠性、抗干扰能力和对环境的适应性。常用的无位置传感器的控制方法主要有以下几种:反电动势检测法简单可靠,但在低速和转子静止时不适用;状态观测器法提出较早,但其只适用于感应电动势为正弦波的无刷直流电动机;定子电感法较好地改善了反电势法的低速性能,但其需要对绕组电感进行实时监测,实现难度较大。函数法G(θ)又称为速度无关位置函数法,在转子转速接近零到高速时它都能够对转子位置进行检测,给出换相时刻。但由于电机的非线性与部分系统参数的不确定性,会使控制精度下降。
RBF神经网络是一种三层前向网络,由 J.Moody和C.Darken在上世纪80年代末提出,具有很强的自学习、自适应能力,可以模拟任意输入到输出之间的非线性映射关系。本文采用RBF神经网络结合G(θ)函数法来估计转子换相时刻,根据电机运行状态,修正神经网络的连接权值,以得到理想的换相信号。利用神经网络的非线性映射能力和G(θ)函数法与速度无关的优点,提高了系统控制精度。仿真和实验结果表明,该方法能准确地检测出转子的换相信号,具有优良的控制性能。
1 G(θ)函数法原理分析
以三相六状态无刷直流电动机为例,首先对电机做如下假设:
(1)电机运行于额定条件,因而可以忽略绕组电流的磁饱和现象。
(2)漏感很小,可以忽略不计。
(3) 忽略铁损耗[3-4]。
无刷直流电动机A、B相之间电压的表达式:

式中:fabr(θ)是A、B相的位置关联磁链函数。定义一个新的位置函数:

该H位置函数可表示:

为消除角速度ω,得到与速度无关的位置函数G(θ)函数式,可以用两个线电压H位置函数表达式相除,即:

该信号在每个换相点具有高灵敏性,与转速无关。图1是无刷直流电动机应用速度无关位置函数法时的H函数、G函数和换相信号波形。图中6个模式对应着无刷直流电动机一个换相周期的6个状态。

图1 电机的H函数、G函数和换相信号波形
从图1中可以看出G(θ)函数的峰值点就是对应的换相时刻。G(θ)函数与速度无关,且包含连续续的位置信号。通过对H函数的不同比较可以得到6种导通模式,每种模式对应60°的导通电角度。在实际应用中,G(θ)函数要离散化,G(θ)函数的离散化表达式和导通模式如表1所示。
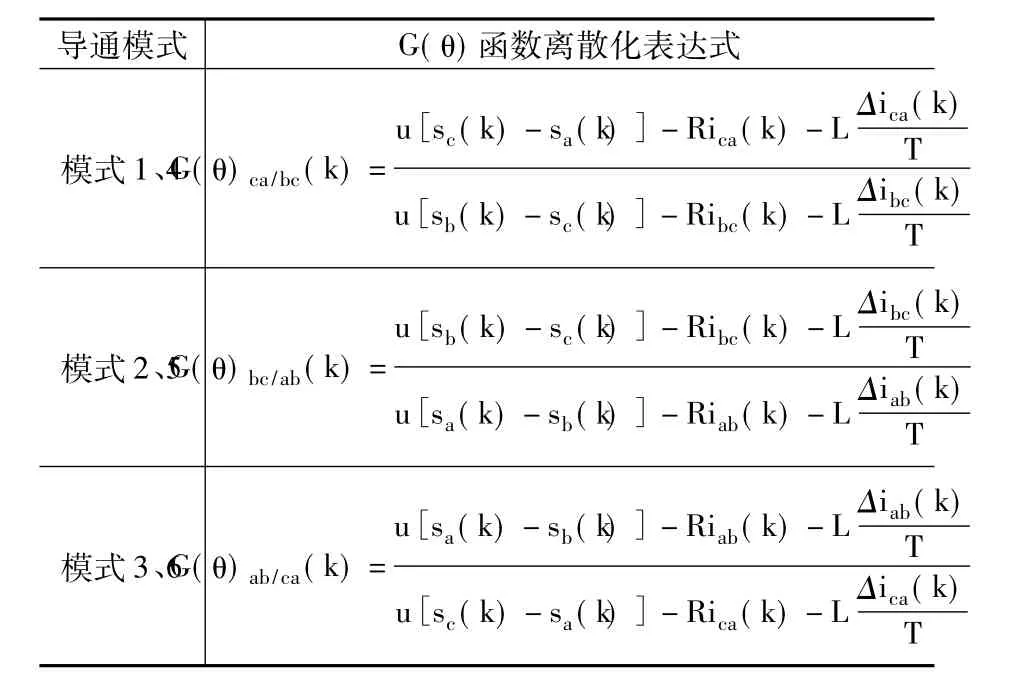
表1 函数的离散化表达式和导通模式
表中,sa(k)、sb(k)、sc(k)为 kT 时刻的 A、B、C三相的导通状态。sn(k)=1,该相导通;sn(k)=0,该相截止,T为采样周期。由于电机以任何速度运行时该函数的表达方式都一样,所以在电机的暂态和稳态都能得到一个换相脉冲。但是,在实际应用中,电机是非线性系统,而且部分参数不确定,单纯采用G(θ)函数法,效果一般。
2 RBF神经网络模型
RBF神经网络是具有单隐层的三层前馈网络,可以模拟任意输入到输出之间的非线性映射关系。因此,RBF网络是一种局部逼近网络,已证明它能以任意精度逼近任意函数。RBF神经网络结构如图2所示。

图2 RBF网络结构
在 RBF 网络结构中,I=[ia,ib,ic]T,为网络的输入量,分别代表着无刷直流电动机的三个相电流,y为输出量。设RBF网络的径向基向量:

其中:hj为高斯基函数,即:

网络的第j个结点的中心矢量Cj=[cj1,cj2,…,cji,…,cjn]T,其中 i=1,2,…,n;设网络的基宽向量B=[b1,b2,…,bm]T,bj为节点 j的基宽度参数;网络权向量 W=[w1,w2,…,wj,…,wm]T,网络输出:

3无位置传感器控制系统
3.1控制系统原理分析
通过对G(θ)函数的检测原理分析得知,对于无刷直流电动机来说,只需要知道换相点的时刻,即可获取转子的位置信息[6-7]。RBF神经网络的输入信号为电机相电流,输出为相电流的变化率与开关信号,根据系统的运行状态,不断修正神经元之间的连接权值,得到理想的开关信号与相电流变化率。经过滤波处理后输入到G(θ)函数,得到换相信号。图3为无刷直流电动机无位置传感器控制框图。

图3 无刷直流电动机无位置传感器控制框图
通过RBF神经网络与G(θ)函数对系统进行控制,实现了电机转子位置与相电压、电流之间的非线性映射。采样的相电流经电流控制器构成电流控制环,实现对电流的调节。通过对G(θ)函数设置门限值确定换相时刻,门限值由相电流上升时间与期望超前角度决定。
3.2 G(θ)函数值的整定及误差消除
无刷直流电动机每转一周能得到六个换相信号,G(θ)函数值计算的准确与否直接影响到转子位置检测的精度。利用表1中G(θ)函数的离散化表达式计算其函数值,根据G(θ)函数值的大小分析转子的位置。选取合适的门槛值,确定换相时刻。G(θ)函数门槛值的大小,影响到换相的滞后角度。实验证明:当选取G(θ)门槛值为23,即G(θ)≥23时进行换相,控制精度较高。
由于无刷直流电动机的开关信号存在一定的误差,并非精确的0、1两个值,幅度会在0、1的附近波动,而电机桥路的通、断只需要0、1两个信号,所以需要对输出信号进行滤波处理,滤波采用的原则如下,

式中:si(k)为当前网络第k时刻滤波后的开关信号,si(k-1)为网络第k-1时刻滤波后的开关信号。
3.3控制算法流程
基于RBF神经网络的无刷直流电动机速度无关控制过程如下:
(1)依照初始化过程,对RBF神经网络的参数进行初始化设定,连接权值取[-0.5,0.5]之间的随机数,设置G(θ)函数值的门槛值为23。
(2)起动系统,采样无刷直流电动机的相电流。取隐节点的激活函数为S型函数:

式中:a、b、d为常数,采用S型函数能够满足电气传动控制系统的控制要求。
(3)将采样得到相电流ia、ib、ic送入RBF神经网络,检测相电流变化率与开关信号,实时修正神经元之间的连接权值。
(4)根据采样得到的相电流与神经网络输出的电流变化率和开关信号,计算G(θ)函数值。用G(θ)函数的实际值与门槛值进行比较,若大于等于23,则输出换相信号。
(5)如果尚未达到结束条件(通常为在一个周期内,G(θ)函数实际值未能有6次大于等于23),则返回步骤(1),重新起动。
(6)如果达到结束条件,即一个周期内能为电机提供6个准确的换相信号,则算法结束。否则,返回步骤(1)。
在整个控制过程中,输入信号周期性的进入网络,实时修正RBF神经网络的连接权值,直到输出理想的换相信号。
4仿真和实验结果分析
4.1仿真结果分析
利用MATLAB/Simulink对本系统的控制性能进行了仿真分析。仿真与实验所采用的无刷直流电动机相同,具体技术参数:额定功率Pn=128.5 W;额定电压V=24 V;额定转速nn=3 600 r/min;端电阻 Ra=1.1 Ω;额定电流 In=5.2 A;电枢回路总电阻 Ra=1.087 Ω;励磁回路总电阻 Rf=181.5 Ω;电动机转动惯量 J=0.76 kg·m2。
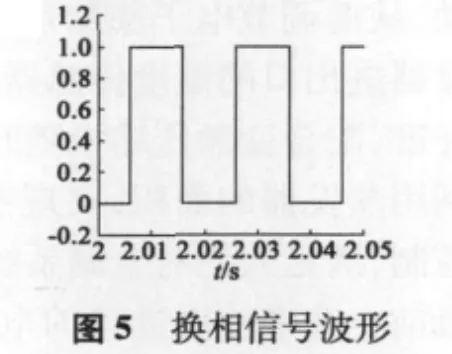
图4为电机的A相电流仿真波形。图5为电机的换相信号仿真波形,图6为霍尔位置信号仿真波形,图7为G(θ)函数仿真波形。



4.2实验结果分析
本文采用TMS320F2812型DSP作为控制系统的主芯片,以实现系统的控制策略,包括对采样到的相电流处理,G(θ)函数值的计算和RBF神经网络的控制性能的实现,其控制框图如图8所示。实验中使用DS1102D型示波器记录了电机的A相电流和换相信号波形,图9为电机的A相电流波形,图10为电机的换相信号波形。

图8 无刷直流电动机控制框图


从仿真和实验的波形可以看出,本文提出的基于G(θ)函数法的无刷直流电动机控制新策略,能够为无刷直流电动机提供精确的换相信号,实现了无位置传感器控制。
5结 语
本文提出了基于RBF神经网络的无刷直流电动机速度无关控制新策略,实现其无位置传感器控制。该方法结合G(θ)函数法与RBF神经网络各自的优点,根据电机运行状态,实时修正神经元之间的连接权值,得到准确的电流变化率与开关信号,利用相电压、相电流与转子位置的对应关系和RBF神经网络的非线性映射能力来获取转子的换相信号,实现了与速度无关的无位置传感器控制策略。仿真和实验表明,该方法能够准确给出换相时刻,具有良好的控制性能。下一步工作是继续深入研究G(θ)函数法与RBF神经网络,并将其应用于工业生产中。
[1] 崔巍,孙杰,范洪伟,等.汽车发动机冷却用无位置传感器无刷直流风机系统[J].微特电机,2011(3):62-65.
[2] 钟金广,姚河,侯识河.基于非均匀高斯函数的无刷直流电机模糊控制[J].微特电机,2009(7):41-43.
[3] 姜吉顺,季画.一种无传感器无刷直流电动机的控制方法[J].微特电机,2007(8):48-51.
[4] 谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011:268-276.
[5] 刘金琨.先进PID控制与MATLAB仿真[M].北京:电子工业出版社,2006:170-171.
[6] 史婷娜,田洋,夏长亮.基于小波网络的永磁无刷直流电机无位置传感器控制[J].天津大学学报,2007,40(2):190-193.
[7] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:79-80.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
北京第二外国语学院学报(2021年2期)2021-08-13
北方人(2021年13期)2021-07-17
雷达学报(2018年5期)2018-12-05
系统工程与电子技术(2016年7期)2016-08-21
通信电源技术(2016年3期)2016-03-26
焊接(2016年5期)2016-02-27
客车技术与研究(2015年3期)2015-08-24
