基于BP神经网络的船舶焊缝缺陷图像识别
2012-07-24 03:18田凯伟
武汉理工大学学报(信息与管理工程版) 2012年3期
高 岚,胡 亮,罗 乐,田凯伟
(1.武汉理工大学能源与动力工程学院,湖北武汉430063;2.广东省深圳市海事局,广东深圳518000)
X射线检测产生的船舶焊缝图像存在着对比度不高、缺陷边缘不清晰、图像噪声多、背景起伏大等缺陷[1],因此选取一种合适的焊缝图像缺陷提取及识别方法显得尤为重要,它将直接影响焊缝的分类及最终的等级评定。目前,模式特征不同,其判别决策方法也不同,主要有统计模式识别、模糊模式识别和神经网络识别等方法。但统计模式识别和模糊模式识别方法需要做大量的计算统计,识别速度慢,判别函数选取困难,没有自学习功能,这都严重影响了其应用效果。而通过BP神经网络方法实现图像识别,不仅可以处理一些环境信息复杂、背景知识不清楚、推理规则不明确的问题,允许样品有较大的缺损和畸变,而且运行速度快,自适应性能好并具有较高的分辨率。因此,笔者将BP神经网络方法应用于船舶焊缝缺陷图像识别中[2]。船舶焊缝图像识别流程如图1所示。

图1 船舶焊缝图像识别流程图
1 船舶焊缝缺陷图像预处理
1.1 图像预处理
X射线检测焊缝原始图像存在着灰度区间比较窄、缺陷边缘模糊、图像噪声多、缺陷特征有时被淹没等缺点,这对焊缝图像分析和评价的效果产生了影响,因此正确提取缺陷特征,对焊缝图像进行预处理是非常必要的。通过对船舶焊缝胶片成像的特点进行分析,运用中值滤波、模糊增强、图像二值化,以及图像区域消除等图像处理算法,提取出所需要的目标焊缝特征并计算特征参数,为识别分类做好铺垫[3-5]。船舶焊缝图像预处理流程如图2所示,各过程处理图像如图3所示。

图2 船舶焊缝图像预处理流程图

图3 各过程处理图像
1.2 船舶焊缝图像特征提取
船舶焊缝缺陷主要分为6类:裂纹、未熔合、未焊透、气孔、条状夹渣及球状夹渣,要想正确地识别这些缺陷,就需要找到能反映其本原的特征,根据缺陷影像的几何形状、影像在图中的相对位置及影像的黑度分布来进行判断。分析一个缺陷图像,一般先通过缺陷图像的形状进行初步判断,然后通过不同的特征参数进一步地描述和识别,为最终的识别和分类做好铺垫。
(1)缺陷面积S。计算焊缝图像缺陷内包括缺陷边界所有像素的数目,即缺陷区域大小。
(2)缺陷周长L。缺陷外边缘的长度,通常用缺陷边缘上相邻的两两像素之间的距离之和来计算。取缺陷边缘上一像素点为起点,在八连通区域内,统计边缘像素中长度为1和的链码的个数和相应方向的链码个数与长度的积值再相加,即周长值。
(3)缺陷长轴l1和短轴l2。取缺陷边界上任意向量之间的距离最大值,即为缺陷的长轴;在确定长轴两像素点形成的直线后求斜率,求得短轴的方向,然后在边缘数组内求出与长轴垂直的长度最大的两像素点形成的直线,即为短轴。
(4)周长与面积比 L/S。用来描述缺陷形状的参数,当形状为圆时,周长与面积比最小;反之越呈长条形,周长与面积比就越大。
(5)周长平方与面积比L2/S。通过计算缺陷目标区域的周长和面积,来判定该区域的形状复杂程度。周长平方与面积比越大,区域形状越复杂[6-7]。
2 船舶焊缝缺陷图像识别
2.1 BP 算法
BP算法是一种有教师学习算法,在训练时需要指定输入矢量与目标输出矢量。BP算法的本质就是求取误差函数的最小值,它采用非线性规划中的最速下降方法,按误差函数的负梯度方向修改权系数。网络输出误差定义为:

式中:Xmi为实际输出;Yi为输出单元的期望值。用SIGMOID函数来描述单个神经元的输入输出关系。由于BP算法按误差函数E的负梯度方向修改权系数,故权系数修改量为:


如果网络的层数较多,则计算量就大,收敛速度就慢。因此,为了加快收敛速度,一般以上一次的权系数作为本次协整的依据之一,故有修正公式:

式中:η为学习速率,即步长;α为权系数修正常量,α、η 范围为 0 < α、η <1[8-10]。
2.2 BP神经网络设计
理论分析证明,具有单隐含层的BP神经网络可以映射所有连续函数,只有学习不连续函数时才需要两个或以上的隐含层,因此,笔者设计具有输入层、输出层和隐含层的3层结构BP神经网络来进行船舶焊缝缺陷图像的识别。隐含层节点数的选取应满足容量和学习速度的要求,隐含层节点数越多就越能精确地逼近训练样本构成的区域,但易产生过拟合现象,降低泛化能力;反之,如果节点数过少,则会产生欠拟合现象,达不到逼近精度,从而学习不能收敛。隐含层节点数目可按下面的隐含层节点经验公式计算得到:

式中:p为隐含层节点数;m为输入节点数;n为输出节点数;a为1~10之间的常数。
将前面选取的5个特征参数作为输入节点,5种焊缝缺陷类型作为输出节点,根据式(5)得到隐含层节点数的初始值为5,经过样本训练,不断改变隐含层节点数,以选取最佳隐含层节点数。网络各单元之间的连接权值和阈值随机地赋予[0,1]之间的值,为了避免每一步权值的调整方向是同向的,应用随机数来得到这些权值和阈值,学习速率取0.015,相关系数取 0.850,全误差定为0.001。网络训练结果如表1所示。通过表1可知,隐含层节点数取12时,网络能很快地收敛。因此,笔者设计的网络是5×12×5的3层结构,如图4所示。
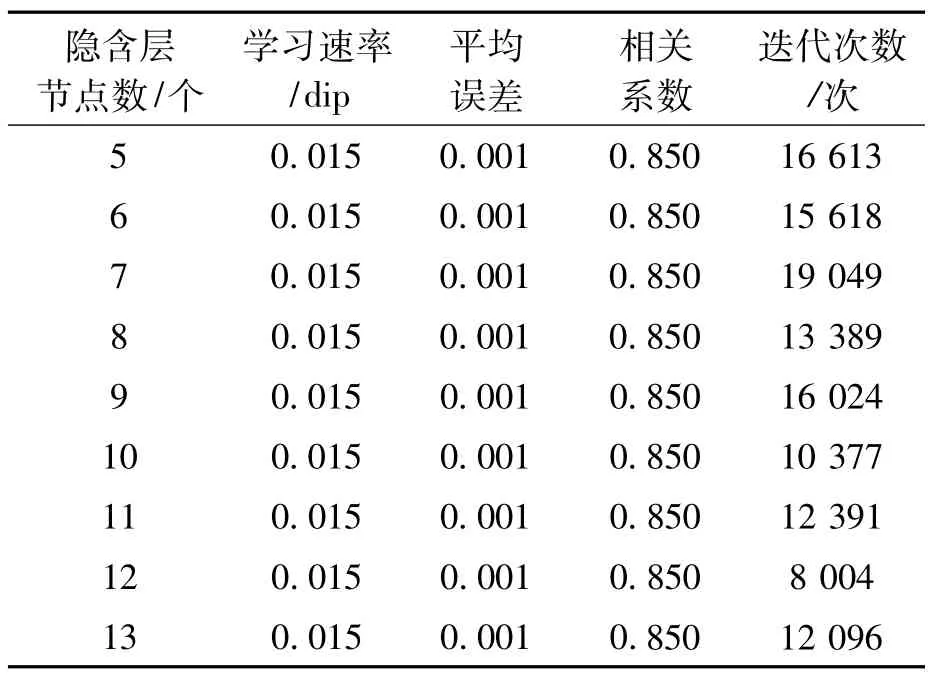
表1 网络训练结果

图4 BP网络结构图
2.3 BP神经网络样本训练与测试
笔者选取了30张焊缝缺陷图像作为训练样本,其中裂纹7张、未焊透3张、未熔合6张、气孔7张和夹渣7张。同时选取25张典型的焊缝缺陷图像作为测试对象,这些样本不需要参加训练,其中裂纹、未焊透、未熔合、气孔和夹渣各5张。部分类型缺陷特征参数训练样本数据如表2所示。在网络学习开始之前,将焊缝缺陷图像的特征参数序列输入到网络的输入层。

表2 部分类型缺陷特征参数训练样本数据
由于SIGMOID型函数的渐进值为0或1,为了保证网络的收敛性,此时输出0.1表示0,0.9代表1,网络对输入模式产生的实际输出大于0.5判断为0.9,小于0.5判断为0.1。输出层节点数为5,裂纹采用(0.1,0.1,0.1,0.1,0.9)表示,未焊透用(0.1,0.1,0.1,0.9,0.1)表示,未熔合用(0.1,0.1,0.9,0.1,0.1)表示,气孔用(0.1,0.9,0.1,0.1,0.1) 表示,夹渣则用(0.9,0.1,0.1,0.1,0.1)表示。网络识别结果如表3所示。通过表3中的数据,不难发现训练样本的数量影响着识别效果,识别效果与学习数量样本成正比关系。但基于样本的收集有限等因素,在一定程度上也影响了网络的训练效果。通过反复的实验,笔者所设计的网络的总体识别率能达到84%左右。
利用贝叶斯决策统计理论进行识别,研究的关键是特征的提取,需要对大量的图像进行统计分析,找出规律性认识,但该方法运行时间长,如果特征不明显,就容易出现误判;支持向量机方法是在统计学习理论上发展的新方法,但它的精度与向量机的支持向量个数有直接关系,在一定训练精度下,支持向量的个数越少,其泛化性能越高,然而由于缺陷类别样本数不同,容易导致误识别的概率相对较大;BP神经网络对待识别的对象不需要有太多了解,具有一定智能化处理的优点。因此,笔者设计的基于BP神经网络的焊缝缺陷图像识别模型更为有效,通过增加训练样本数量和选用更好的图像特征参数,能进一步提高识别效果。

表3 网络识别结果
3 结论
将BP神经网络方法应用到船舶焊缝缺陷图像识别中,利用BP神经网络的信息,分布式储存于连接权值系数中,网络具有较高容错性,可有效地解决船舶焊缝胶片数字化和图像输入的过程中存在噪声和输入图像的部分损失等问题,大大提高船舶焊缝缺陷图像识别的准确率。
[1]张晓光,高顶.射线检测焊接缺陷的提取和自动识别[M].北京:国防工业出版社,2004:21-22.
[2]万彩婷.基于BP神经网络的图像识别与跟踪研究[D].西安:西安电子科技大学图书馆,2006.
[3] ALAKNANDA R S,ANAND PK.Flaw detection in radiographic weld images using morphological approach[J].NDT & E International,2006,39(1):29 -33.
[4] 高岚,赵永珠,范世东,等.基于HU不变矩的船舶焊缝缺陷图像特征提取[J].船海工程,2009,38(2):94-95.
[5]刘粲,谢小鹏,陆丕青,等.基于BP神经网络的铁谱磨粒图像识别方法研究[J].润滑与密封,2010,35(4):72-74.
[6] 翟俊海,赵文秀,王熙照.图像特征提取研究[J].河北大学学报:自然科学版,2009(1):106-110.
[7]杨枝灵,王开.数字图像获取处理及实践应用[M].北京:人民邮电出版社,2003:573-579.
[8] 尹朝庆,尹晧.人工智能与专家系统[M].北京:中国水利水电出版社,2002:306-314.
[9] 李小泉.自动检测系统关键技术研究[D].武汉:武汉理工大学图书馆,2006.
[10]张锐,胡荣强,杨秀芝.基于神经网络的曲轴滚压校直专家系统研究[J].武汉理工大学学报:信息管理与工程版,2010(1):23-25.
猜你喜欢
空间科学学报(2020年1期)2021-01-14
科技创新与应用(2020年6期)2020-02-29
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年12期)2019-08-13
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
制造技术与机床(2017年11期)2017-12-18
中国交通信息化(2017年8期)2017-06-06
北京理工大学学报(2016年6期)2016-11-22