
双馈电机调速系统的仿真与研究
2012-09-15 07:20吴思敏徐朝阳
湖北工业大学学报 2012年4期
赵 阳,张 婷,吴思敏,徐朝阳
(湖北工业大学电气与电子工程学院,湖北 武汉430068)
“双馈”是指把绕线转子异步电动机的定子绕组和转子绕组分别接在含电动势的电路上,使定子绕组与转子绕组之间可以进行电功率的相互传递.“双馈”所具有的独特处是转差功率可以流动到电网,也能够由电网流进来[1].
在双馈调速系统中,绕线转子异步电动机的定子侧直接连接到大电网上,转子侧可以与交流电源或含电动势的外电路相连接,通过改变与转子绕组相连接的电源的频率、幅值、相位和相序,可以调节绕线式异步电动机的转矩、转速、转向以及定子侧的无功功率,就是通过这样的方法使绕线式异步电机低于或高于同步速运行.
双馈调速系统具有很多优点,其中,所用的变频器的功率仅占电动机总功率的一小部分,显然这样可以降低变频器的容量,从而节省调速系统的成本.另外,双馈电机还可以调节功率因数.由于具备这些优点,双馈电动机特别适合应用于大功率的风机、水泵类负载的调速;双馈调速系统在风力、水力等能源开发领域也是一种比较先进、理想的发电技术,具有很广泛的应用前景.
1 双馈电机的系统结构图
双馈电机的系统结构见图1,双馈电机的定子侧与转子侧的变频器都采用三相电压型SPWM变换器.

图1 双馈电机的系统结构图
2 双馈电机在dq坐标系下的数学模型
三相异步电动机在三相静止坐标系abc上的数学模型具有多变量、高阶、非线性、强耦合的特点[2].直接求解这样一个复杂的非线性系统非常困难.为了使异步电动机的数学模型具有可控性、简单化,必须对其进行简化、解耦,使其成为一个线性系统.根据数学定律和物理学可知,最有效的途径是坐标变换法.
绕线型感应电机在dq坐标系下的磁链方程为

其中,id1、iq1、ψd1、ψq1分别为dq坐标系下定子电流和磁链的分量;id2、iq2、ψd2、ψq2分别为dq坐标系下转子电流和磁链的分量;L1、L2分别为dq坐标系中定子和转子绕组的自感;Lm为dq坐标系中定转子绕组间的互感系数.
绕线型感应电机在dq坐标系下的电压方程为

其中,ud1、uq1为别为dq坐标系下的定子电压的分量;ω1为dq坐标系相对于定子A相轴线的旋转角速度,是电网电压频率的同步角速度;ud2、uq2分别为dq坐标系下的转子电压的分量;ω2=ω1-ωr为dq坐标系相对于转子的角速度,即转差角速度,ωr为转子旋转的角速度.
绕线式感应电机在dq坐标系下的转矩方程为

其中,Tem为电磁转矩;nP为电机的极对数.
绕线式感应电机在dq坐标系下的运动方程为

其中:TL为负荷转矩;J为电机及负载的转动惯量;D为运动阻尼系数.
绕线式感应电机在dq坐标系下的定子以及转子侧的有功功率和无功功率的计算式如下:

式(1)-(5)即为双馈电机在dq坐标系下的数学模型.
3 控制策略
本文采用定子磁链矢量ψ1作为定向矢量,把MT坐标轴系的M轴与定子磁链矢量ψ1重合,T轴超前 M 轴90°[3-5].根据式(1)-(5)所列感应电机的数学模型可以写出其在同步旋转坐标系MT下的数学模型.
双馈电机定子侧、转子侧的磁链方程为

双馈电机定子侧、转子侧的电压方程为

双馈电机定子侧的有功功率P1、无功功率Q1的方程为

由前提条件可得

若忽略定子绕组电阻,即R1=0;因为定子侧直接接在工频电网上,故认为定子电压u1为常量,由式(7)可以得到

将式(10)代入式(11)有

将式(11)代入式(9)可以得到
由式(13)可知,P1与iT1成正比,Q1与iM1成正比,可以得到控制双馈电机定子侧的无功功率等效为控制定子侧的电流iT1、iM1.
由于双馈电机的定子侧直接与工频电网相连接,只能通过控制转子侧来间接控制定子侧,而转子侧的电压、电流等变量是可以直接控制的.
由式(10)以及式(6)可以得到

通过采用定子磁链定向的控制方法,并忽略定子绕组的影响,得到双馈电机在同步坐标系MT轴下的数学模型,该数学模型实现了降阶,为实现双馈控制策略奠定了基础,并使得控制策略变得简单化.
在实际的系统中,需要对无功功率进行实时控制.通过DSP实时控制,将定子侧的相电压ua1、ub1、uc1以及相电流ia1、ib1、ic1经过 ABC/α1β1的坐标变换得出其在两相静止坐标系下的电压uα1、uβ1以及电流iα1、iβ1,根据以下的计算式可得到.

4 基于定子磁链定向的双馈电机控制图
无功功率这一部分的控制对象为双馈电机定子侧输出的无功功率Qs或功率因数λs,有功功率这一部分的控制对象为双馈电机定子侧有功功率Ps、转速ωr、电磁转矩Te,在采用定子磁链定向的基础上,这些量与转子电流之间的关系式如下:



所以,在双馈电机运行时,双馈电机的数学模型见图2.由此,可以得出双馈电机系统矢量控制图(图3).

在图3中,给出了速度模式控制和电流模式控制的基于定子磁链定向的双馈电机控制策略.在这两种模式控制下,内环均为电流环,并且都采用PI控制器.外环采用定子侧无功功率、转速作为控制目标,使用的是PI控制器,采用这种双闭环控制有利于提高整个系统的精确度,提高系统的鲁棒性.
5 仿真结果
所给双馈电机调速系统参数如下:额定功率P=7 500W,定子额定电压u1=380V,定子频率f1=50Hz,定子阻抗R1=0.48Ω,定子漏感Ls=0.005 045H,转子阻抗Rr=0.832Ω,转子漏感Lr=0.005 045H,电机极对数np=3,转动惯量J=0.065kg·m2,电流内环PI参数如下:kp=0.5,ki=30;外环 PI参数如下:kp=0.001,ki=0.5.图4~图14为仿真波形图.







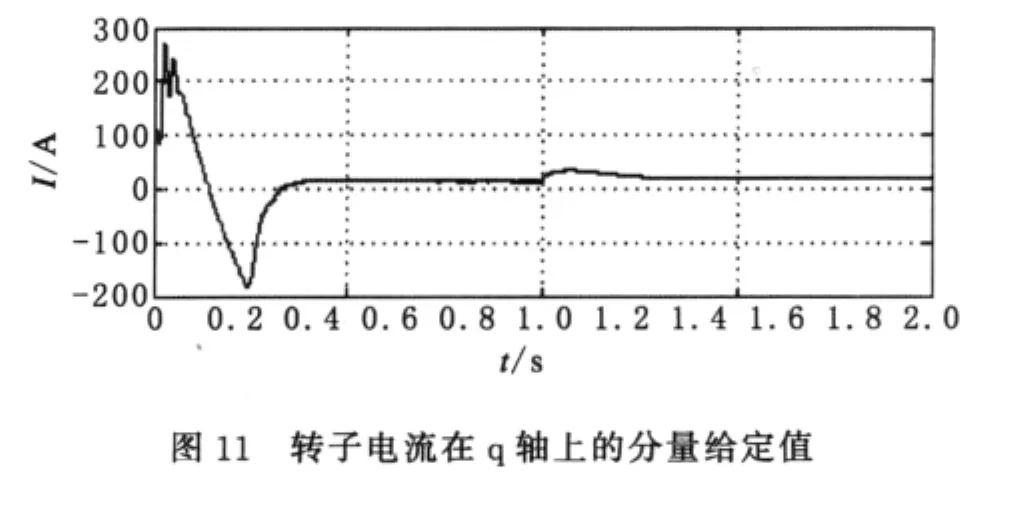



图14 转子电压在β轴上分量值
从仿真波形图可以看出双馈电机的以下特性.
1)双馈电机能在次同步、同步、超同步三种状态下运行,并且响应迅速.在次同步状态工作时,从双馈电机定子端输入功率,转差功率由转子侧馈送到电网.在超同步状态工作时,双馈电机的输入功率由定子侧、转子侧共同提供.
2)速度和无功功率分别可以快速地跟踪响应,而且超调量较小.
3)在不同的工况下运行,定、转子的谐波含量少,功率因数高.
4)由于速度环PI调节器的作用,转子电流在d、q轴的分量能够快速响应外环的变化
5)当电机参数发生变化时,系统仍能保持转速稳定,鲁棒性强.
由此可见,双馈电机在定子磁链定向的矢量控制策略下,响应迅速,能调节在不同的工况下运行,此方案符合设计要求.
6 结论
本文通过分析双馈电机在MT坐标系下的数学模型,确定了以定子磁链定向的矢量控制策略.根据该控制策略,搭建了双馈电机在MATLAB中的simulink环境下的仿真模型,并分析了仿真结果,由仿真结果可以看出此方案基本达到了预期的目的,验证了该调速系统的有效性,可行性.
[1]阮 毅,陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2009.
[2]吴 胜,双馈电机的控制系统研究[D].武汉:华中科技大学图书馆,2005.
[3]洪乃刚,电力电子和电力拖动控制系统的 MATLAB仿真[M].北京:机械工业出版社,2006.
[4]张 杰,刘 群,廖冬初.泵站电机双馈调速控制系统设计[J].武汉:湖北工业大学学报,2000(3):4-7.
[5]武春喜,马志云.双馈电机稳态分析与仿真[J].电机与电器技术,2000(5):12-15.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
防爆电机(2020年6期)2020-12-14
制造技术与机床(2019年11期)2019-12-04
电子制作(2017年20期)2017-04-26
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年16期)2015-04-12
大电机技术(2015年5期)2015-02-27
