
变电站巡检机器人云台设计及动力学仿真
2012-10-16 10:08王明瑞孙大庆
制造业自动化 2012年9期
曹 涛,王明瑞,孙大庆,杨 墨,王 飞
(山东电力研究院 国家电网电力机器人重点实验室,济南 250000)
0 引言
长期以来,我国变电站中大多采用人工巡检作业方式,在高压、超高压以及恶劣气象条件下,不仅对人身会照成极大的危害,同时对电网安全运行也会带来一定隐患。而变电站巡检机器人系统以全自主控制方式,在无人值守变电站对室外高压设备进行巡视,可及时发现变电站高压设备的热缺陷、异物悬挂等异常现象。通过巡检机器人携带的各种传感器,完成变电站设备的图像采集、设备仪表的识别、红外状态检测等,同时记录相关设备信息,并提供异常状态报警。完全代替了传统的人工巡检作业方式,完成变电站高压变电设备的所有巡检作业。
变电站巡检机器人云台系统是安装、固定信息采集系统的支撑设备,可根据系统预设命令,带动承载在云台上方的信息采集系统转动,使信息采集系统中摄像机完成监视区域的扫描。本文就变电站巡检机器人云台系统结构设计进行探讨。
1 云台工作原理及总体结构
变电站巡检机器人云台设计时,需要考虑巡检机器人运行环境、云台安装位置、云台使用方式、工作电压及其负载大小,同时也要考虑与巡检机器人外观是否搭配等因素。
功耗上,云台选用的功耗电机,减少巡检机器人整机的功耗,减少对整体巡航能力的影响。云台在控制上采用云台控制板独立控制水平、垂直两个方向旋转动作。同时采用总线方式用于工控机与云台控制板间的控制信号传递,同时通过水平、垂直两个解码器分别解出相应控制信号,再控制云台的水平、垂直方向转动。通过巡检机器人控制后台或预设命令发出数据信息,通过云台解码器解码成机械的上下左右运动,进而配合摄像机转动。完成监视区域图像采集工作。
变电站巡检机器人云台的总体结构,如图1所示。云台驱动核心是通过内装的两个电动机。一个负责水平方向的转动,另一个负责垂直方向的转动。水平、垂直电机驱动减速器以增大驱动扭矩并降低输出转速,信息采集系统及其附件安装于支撑板上,同时支撑板随云台的垂直电机驱动而转动,进而完成俯仰旋转动作。信息采集系统同云台同时随云台的水平电机驱动而转动,进而完成水平旋转的动作。考虑变电站巡检机器人工作环境,其供电方式是设计中必须考虑的因素,由于变电站巡检机器人为无人职守全自动巡检模式,所以采用巡检机器人承载电压直流24V。同时水平方向的角度可做360度转动,垂直俯仰方向则有110度旋转范围。当转动角度达到预先设定的限位开关时,限位开关动作切断电源,云台此时停止转动。此外,考虑到巡检机器人云台复杂的工作条件,如巡检机器人运动时会产生颠簸等震动现象,如何设计减速器使得云台即能够满足水平转速和垂直转速要求,同时又具有较大的保持扭矩就成为设计的难点之一。

图1 云台结构示意图
2 模型设计及仿真分析
2.1 直流电机选择
由于云台是由水平、垂直两部分独立的传动机构组成的,而垂直传动机构是主要承载机构,所以在设计时要以垂直传动机构作为主要承载机构来设计,而水平传动机构只受水平磨擦转矩和电缆拖带等所产生的转矩影响。根据设计经验,水平方向所选用的电机功率一般为垂直方向的一半。
变电站巡检机器人云台的承重能力要求不低于10kg,信息采集系统质心与云台旋转轴的距离为0.15m,因此,云台的保持扭矩N1要求大于15N/m。此外,云台的俯仰角速度为≥10°/s,根据市场上主要型号的电动机,我们拟选用转速在4000rpm,齿轮器减速比为1:250的齿轮减速电动机,而云台的齿轮传动比为150/30,则云台的俯仰角速度v为:

云台的垂直驱动扭矩N2为10N/m,根据传动方案大小齿轮的减速比可知,电动机齿轮传动伸出端的输出扭矩为:

则最小电机额定扭矩为:

综上所述,该直流减速电机的额定电压为24V,额定转速为4000rpm,减速比分别为1:250,额定转矩为43mN/m,额定功率为15w能够满足云台在垂直方向的转速和扭矩要求。同理在水平方向上将电动机的齿轮器减速比调整为1:125其他尺寸不变能够满足水平方向上转速和扭矩要求。
2.2 减速机构设计
设计时根据巡检机器人云台运行特性决定其内部空间有限,要使云台的外型尽量小巧,所以内部空间相对不是很大,同时在保证其传动特点采用齿轮传动,以机械设计原理[1]为基础,其设计步骤为:
1)选定齿轮类型、精度等级、材料及齿数:选用直齿圆柱齿轮7级精度,材料为45钢,并调质及表面淬火硬度40~50HRC,小齿轮齿数为23,大齿轮为23×6.5=150。
2)按齿面接触强度设计:确定公式内各计算数值,如大齿轮分度圆直径、圆周速度、齿宽、载荷系数,同时最终确定其模数。经计算可得其模数为1。
3)校核齿根弯曲强度:确定大、小齿轮的弯曲疲劳寿命、弯曲疲劳强度极限系数等,并计算弯曲疲劳许用应力和载荷系数等,同时根据文献中的计算公式,验证可知所设计的齿轮传动满足设计要求。
2.3 三维实体建模
由于巡检机器人云台对保持力矩、减速结构等提出较高的要求,本文建立了基于ADAMS软件的云台动力学仿真模型,对所设计的巡检机器人云台系统进行动力学研究。在设计之初,就可以实现对整个巡检机器人云台的运动状态、动力性能、载荷及应力属性等进行分析,可较大程度提高巡检机器人云台设计的质量和效率。对巡检机器人云台做动力学分析,需要获取云台各个零部件的属性,如质量参数、惯性参数、质心坐标等参数。然而三维实体建模并不是ADAMS的强项,故笔者选用在Solid Works软件下建立所有云台的零部件模型,同时完成巡检机器人云台虚拟样机的装配工作如图2所示,为直观观察云台的运行状态,图2中已添加信息采集系统。
图2 云台虚拟样机装配图
2.4 动力学仿真分析
利用ADAMS/View自定义仿真输出量,同时利用这一模块提供的样机模型自检工具,针对云台模型进行自检,同时设置仿真分析控制参数,最后设置虚拟样机相关参数以及输入载荷进行仿真分析.如果要进行振动分析,需加载 ADAMS/Vibration模块。
本文中,笔者将所建模型以*.x_t格式导入ADAMS软件中,在模型上添加约束、力/力矩和运动参数;云台减速齿轮材料为45钢,其泊松比为μ=0.29,E=2.07×105 N/mm2,电机转速为2000r/min;云台支撑板及两侧支撑材料选用LY12,其泊松比μ=0.33,E=7.24×104N/mm2。添加云台垂直方向旋转转速为12°/s、水平方向转速为12°/s 。
给定上述输入条件后,应用step函数设定云台由匀速转动到静止的制动时间为0.1s 。根据软件分析得其仿真结果。云台载荷的运动轨迹如图3所示。其中由水平方向转动和垂直俯仰运动叠加而成。云台齿轮切向力最大值为1000N ,为垂直摆角位置,证明在该位置由于云台急停而产生了加大的冲击载荷,如图4所示。云台的垂直俯仰驱动扭矩,如图5所示。其驱动扭矩为14N/m,根据前文分析可知,云台的保持扭矩为15N/m,电机减速器输出端额定扭矩为65mN/m进而验证选的电机能够满足云台系统性能要求。
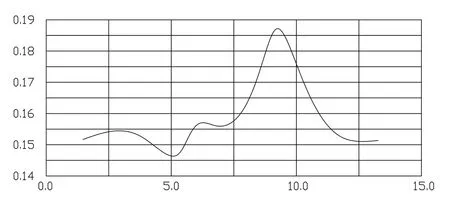
图3 载荷运动轨迹

图4 齿轮切向力
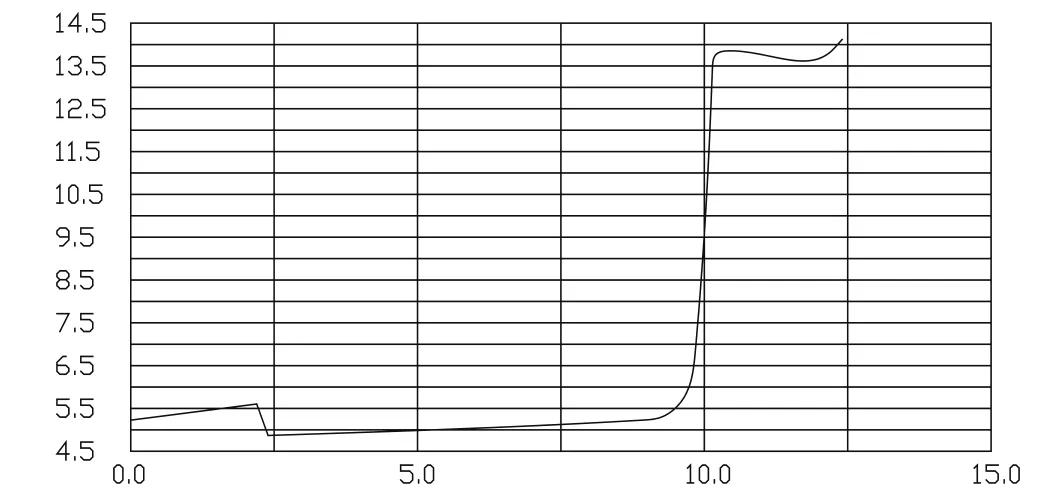
图5 云台垂直驱动扭矩
3 结论
设计了适用于变电站巡检机器人云台系统的机械结构,使此结构能够满足垂直俯仰转动和水平转动性能要求,同时对云台零部件模型利用三维模拟建模,直观了解设计动态,并采用ADAMS软件对云台结构进行动力学仿真分析,验证了所设计的机械结构能够满足变电站巡检机器人云台系统的需求,为云台系统的优化设计依据。
[1]濮良贵,纪名刚.机械设计(第七版)[M].高等教育出版社,2009.
[2]刘建胜,张凡.一种用于变电站高压触点温度在线监测的新方法[J].电力系统自动化;2004,(04).
[3]大槻,治明,宋尔纯.用计算机控制移动式机器人的方法与展望[J].机器人;1980,(02).
[4]KARL T.ULRICH;PRODUCT DESIGN AND DEVELOPMENT[M].2005.
[5]鲁守银,钱庆林,张斌,王明瑞.变电站设备巡检机器人的研制[J].电力系统自动化,2006,(13).
[6]KARL T.ULRICH;PRODUCT DESIGN AND DEVELOPMENT[M].2005.
[7]Biot M A Themoelasticity and irreversible thermodynamics[J]1956(03) DOI:10.1063/1.1722351.
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
摄影之友(影像视觉)(2020年2期)2021-01-14
装备制造技术(2020年2期)2020-12-14
商品与质量(2020年41期)2020-11-09
物流技术与应用(2020年4期)2020-05-06
影像视觉(2020年2期)2020-03-19
电子制作(2019年23期)2019-02-23
中国自行车(2018年8期)2018-09-26
摄影之友(影像视觉)(2017年11期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
