
矩阵式变换器PMSM直接转矩控制系统
2012-10-16 03:56孙少伟郭兴众陆华才
河北工程大学学报(自然科学版) 2012年4期
孙少伟,郭兴众,陆华才
(安徽工程大学安徽检测技术与自动化装置重点实验室,安徽芜湖241000)
传统的交-直-交变换器由于存在中间储能环节,因而动态响应较慢,输入电流中含有大量的谐波,容易造成对电网的污染,同时也难以实现能量的双向流动等缺点。交-交矩阵式变换器(Matrix Converter,MC)体积小、自身结构简单,具有能量双向流通、输出电流正弦性良好、输入功率因数可控等特点。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)以其高效率、高转矩惯量比、高功率密度和低维护费用等特点,使其在现代交流调速系统中成为了异步电机强有力的竞争对手[1]。国内外许多学者提出了很多关于矩阵式变换器供电的IM的直接转矩控制(Direct Torque Control,DTC)的控制策略[2-3],但把 MC 与永磁同步电动机DTC相结合的应用研究则相对较少。
本文在矩阵式变换器的空间矢量调制算法的基础上,结合PMSM的定子磁场定向直接转矩控制原理,提出一种将二者优点相结合的组合控制策略。并运用Matlab/Simulink仿真工具箱对系统模型进行了仿真试验。
1 矩阵式变换器的输出电压矢量
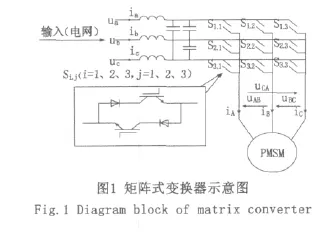
三相交-交型矩阵式变换器的电路拓扑结构和双向开关的组成方式如图1所示,它允许任意输入相到任意输出相的链接。实现三相交-交型矩阵式变换器的主回路由9个双向开关(S1.1~S3.3)组成,每个双向开关都具有双向通断能力,以此实现能量的双向流动,可由2个快速恢复二极管器件和2个 IGBT构成[4]。线路中的 LC滤波器,一方面是为了交流开关的换向,使负载感性电流可以在各项之间切换;另一方面是为了减少滤波线路电流的谐波。
矩阵式变换器的换流控制必须严格遵循两个基本原则:一是三相输入侧任意两相电路没有短路;二是输出侧任意一相电路没有断路。因为这两个基本原则的限制,所以在矩阵式变换器一共允许的27种可能的开关组合中,DTC只可以使用其中的21种(见表1)。其中|u0|和α0分别为对应开关组合的输出电压矢量在定子静止坐标系中幅值和辐角;表1中前18种开关组合(分别命名为 +1,-1,+2,-2,…,+9,-9,)均为有两输出相同时连接到同一输入相上,称为运动矢量。表1中后3种开关组合均实现了输出三相的短路,输出电压和输入电流均为零,称为零矢量[4]。

表1 DTC中使用的开关组合Tab.1 The switching state used by DTC
2 基于矩阵式变换器的DTC的策略
2.1 转矩和磁链的控制原理
[4] 得出PMSM直接转矩控制的最终表达式

由式(1)可知,PMSM的输出转矩与定子磁链、转子磁链幅值及转矩角 δ的正弦成正比。PMSM转子磁链幅值一般为恒值,可以通过改变转矩角的大小来改变电动机转矩大小,这就是PMSM直接转矩控制理论基础。
DTC对转矩和磁链的控制是通过滞环比较器来实现的,利用转矩滞环比较器、磁链滞环比较器及定子磁链所处的位置选出一个最佳电压矢量作用于永磁同步电机,以此实现对转矩和定子磁链的双闭环控制。
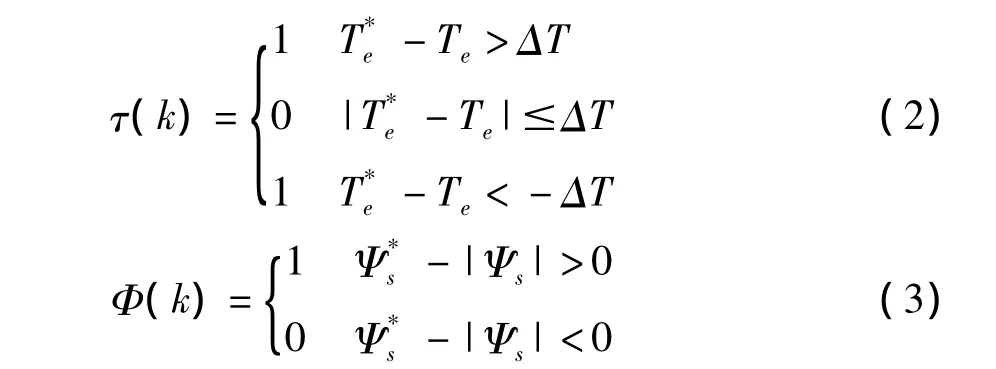
转矩滞环比较器和定子磁链滞环比较器的输出量τ,Φ的函数定义如下:
矩阵式变换器用于DTC的开关状态共有21种,由此可见,矩阵式变换器可比传统三相交-直交型逆变器输出更多的电压矢量,即矩阵式变换器驱动永磁同步电机DTC系统还可以控制除转矩和定子磁链的另一个变量。文献[5] 中将输入电压矢量和输入电流矢量夹角φi的正弦量的平均值作为第3个控制变量。其中,转矩、定子磁链和sinφi的控制器均通过滞环比较器来实现,通过查表的方式来选择一组最佳的电压矢量作用于永磁同步电机,从而达到同时控制3个变量的目的。
为实现转矩和磁链对矩阵式变换器电压矢量的最优控制,通常遵循的原则是:在每个输入电压扇区中,把矩阵式变换器输出电压矢量按照对转矩和磁链的控制效果相同等效为两电平逆变器DTC中电压矢量作为选择原则控制转矩和磁链。当有多个电压矢量均能满足转矩和磁链的控制要求时,则还要根据功率因数控制的要求决定。
2.2 最优开关组合及系统结构
矩阵变换器最优开关矢量表见表2。表2中第一列为DTC中保持定子磁链与转矩在滞环比较器容差范围内时所选择的电压矢量;第一行为电网侧输入电压所处位置的扇区号;cφ为功率因数控制滞环比较器的输出值,以现实电网的单位功率输入。通过对3个变量的控制,来选择一个最优电压矢量作用于永磁同步电机。当需要一个零矢量输出时,则根据功率开关次数最少的原则,输出一个0 矢量[6]。
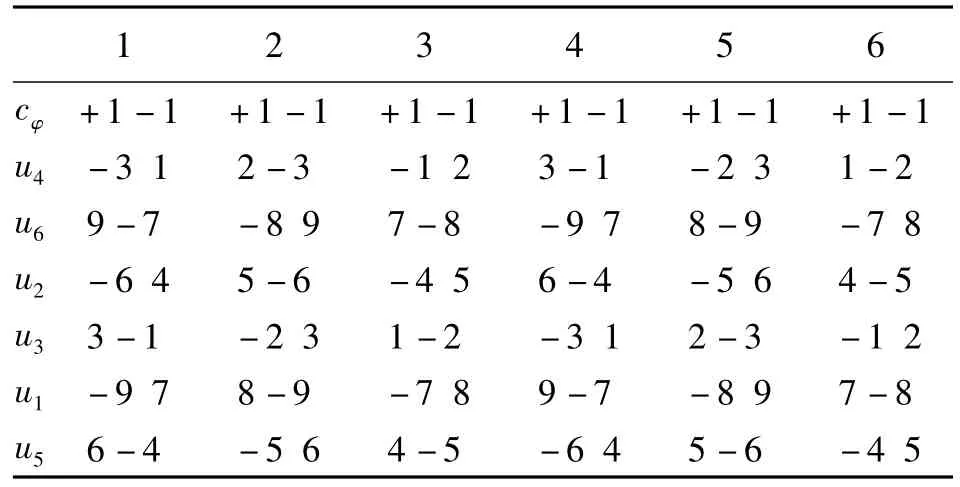
表2 矩阵式变换器最优开关矢量表Tab.2 Matrix converter optimal switch vector
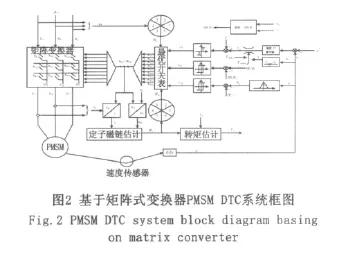
根据前面转矩、磁链及功率因数控制原理的分析,本文提出一种将矩阵式变换器和永磁同步电机直接转矩控制相结合的系统,构成磁链、转矩和功率因数的闭环控制,其系统框图如图2所示。
3 系统仿真
为了验证采用基于矩阵式变换器的永磁同步电机直接转矩控制系统的性能,利用Matlab/Simulink仿真工具箱对系统模型进行仿真实验。选择永磁同步电机参数如下:极对数p=2,额定电压U=220 V,频率 f=50 Hz,直轴电感 Ld=0.008 5 H,交轴电感 Lq=0.006 5 H,等效励磁磁链 ψf=0.175Wb,定子电阻 Rs=0.57 Ω,转动惯量为0.001 1 kg·m2,所加负载转矩 T0=10 N.m。摩擦系数为0。系统给定值为:定子磁链幅值为0.6 Wb,直流电压为300 V;sinφi给定值为0(电网侧单位功率因数运行)。
对本文所提出的系统模型进行以下两种情况仿真:
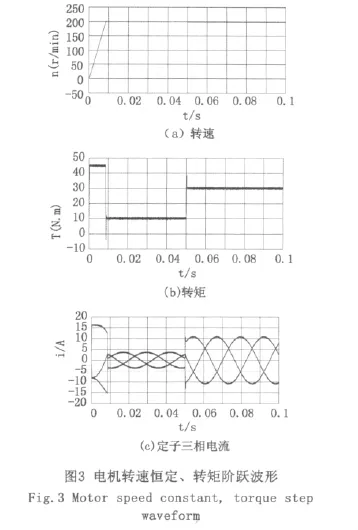
1)给定转速恒定为200 r/min,初始给定转矩为10 N·m,电机运行0.05 s后,将转矩负载突加到30 N·m,其仿真结果如图3所示。从中可以看出给定转速恒定不变,让电机的转矩增加到30 N·m,对转速的影响很小,定子电流和电磁转矩相应的增大,而后电流依然保持正弦稳定。
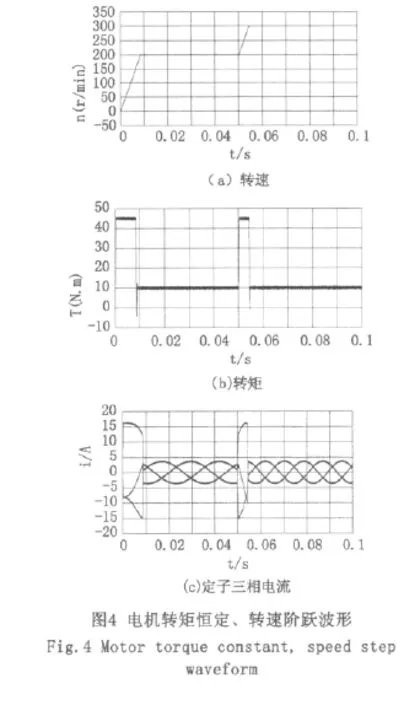
2)给定转矩恒定为10 N·m,初始给定转速为200 r/min,电机运行0.05 s后,将转速突加到300 r/min,其仿真结果如图4所示。从中可以看出转矩恒定为10 N·m,转速突加到300 r/min,转速反应迅速,定子电流和电磁转矩在经过小幅震荡后依然能保持给定,具有很好的鲁棒性。
4 结论
永磁同步电机在参数变化时,系统具有很好的鲁棒性,转速和转矩动态响应良好,并且三相输入电流具有很好的正弦性。由于该系统具有结构简单,算法易于数字实现,鲁棒性强、良好的传动和动态性能等特点,因此具有很好的工程应用前景和理论研究价值。
参考文献:
[1] 李永东,朱昊.永磁同步电机无速度传感器控制综述[J] .电气传动,2009,39(9):3 -10.
[2] KYO BEUM LEE,FREDE BLAABJERG.Sensorless DTC-SVM for induction motor driven by a matrix converter using a parameter estimation strategy [J] .IEEE Trans on Industry Electronics,2008,55(2):512-521.
[3] XIAO D,RAHMAN M F.A modified direct torque control for a matrix converter-fed interior permanent magnet synchronous machine drive[C] .IEEE PESC,2006:1-7.
[4] 任海涛,刘贤兴,仲崇毅.矩阵变换器-永磁同步电动机直接转矩控制系统研究[J] .微特电机,2009(1):39-41.
[5] CASADEI D,GIOVANNI S.The use of matrix converter in direct torque control of induction machines[J] .IEEE Trans on Industry Electronics,2001,48(6):1057-1064.
[6] 周扬忠,钟天云.矩阵变换器供电同步电动机直接转矩控制研究[J] .电气传动,2008,38(10):3-8.
猜你喜欢
湖南电力(2021年1期)2021-04-13
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年12期)2015-04-09
大电机技术(2015年5期)2015-02-27
汽车零部件(2014年7期)2014-06-23
电测与仪表(2014年9期)2014-04-15
电测与仪表(2014年23期)2014-04-04
