
恒流模式直流流强检测系统的优化
2012-10-16 06:22阎映炳冷用斌赖龙伟王宝鹏陈之初
核技术 2012年2期
熊 云 阎映炳 冷用斌 易 星 赖龙伟王宝鹏 张 宁 陈之初
1(中国科学院上海应用物理研究所 上海 201800)
2(中国科学院研究生院 北京 100049)
上海光源(Shanghai Synchrotron Radiation Facility, SSRF)自2009年5月在Decay模式下投入运行以来,有力地推动了我国重要前沿领域基础研究和高新技术开发应用研究。但是,为更好地满足光源用户的需求,SSRF须产生更高亮度、更高稳定性的束团,这就需要采用恒流注入模式(Top-up Mode),即宏观上束流流强不随时间衰减,微观上束流流强好于 1%的恒定水平。同时,这也需要高精度、高时效的直流流强检测系统对恒流注入实施诊断。本文介绍恒流模式下上海光源储存环直流流强检测系统。
1 原直流流强检测系统
原直流流强检测系统基于Bergoz NPCT型探头和 PXI数据采集处理平台,系统软件在 Windows平台上采用 LabVIEW 图形化编程语言进行开发,通过Shared Memory IOCcore技术来实现EPICS的数据接口,完成 LabVIEW 应用程序和控制系统之间的数据交换[1]。
原系统计算流强的算法为算术平均滤波法:以10 kHz数据采样率,累积采样0.3 s,取其算术平均为直流流强值。算术平均滤波算法较为简单,适用于对带有随机干扰的信号进行滤波。
图1(a)为原系统流强分辨率,束流流强小于300 mA时,流强分辨率优于1.5 μA。图1(b)为原系统采样数据剔除直流分量后的频谱图,束流的直流分量为200 mA,可见束流平均流强为200 mA时在483.63 Hz处有一个较大单频干扰信号。由于此干扰信号的存在,用算术平均滤波算法效果不理想,会与真值产生偏差,故须优化原束流流强算法。

图1 束流流强分辨率(a)和原始信号噪声频谱(b)Fig.1 The measured resolution of beam current (a) and noise pattern of the original signal (b).
再则,基于 Windows平台的直流流强测量系统,因软件病毒及网络资源泄漏等问题,长期运行稳定性欠佳,平均无故障时间低于1个月。为提高系统平均无故障时间,须优化原有系统。
该Decay模式下的直流流强测试系统的硬件分辨率达μA量级,完全满足恒流模式下对直流流强监测系统的要求,可沿用原的系统硬件配置:(1) 法国Bergoz Instrumentation公司第三代的NPCT175;(2) 直流流强变压器前端电子学(DCCT Front-end electronics);(3) NI PXI-4070数字万用表;4) NI PXI-8196 2.0 GHz CPU控制器。
2 软件优化
SSRF用EPICS (Experimental Physics and Industrial Control System)作为的控制系统,其有基于工具集的开发环境,我们将其作为软件开发平台。由于Linux操作系统的高可靠性、高扩展性以及优异的网络性能,考虑系统的稳定性以及与EPICS的兼容性需要,我们采用Linux操作系统。
系统的软件结构如图2所示。PXI-4070数据采集卡处于系统的最底层,也是整个上层软件的控制对象。在安装了Linux操作系统、采集卡的底层驱动(可通过命令 nilsdev查看是否检测到硬件)以及EPICS开发环境之后,即可在新建的IOC下根据用户手册编写符合实际需求的功能配置模块。随后在IOC中还需对采集到的信号进行数据处理,处理结果通过Database及Channel Access实现与其它IOC及中控室OPI的通信。
软件开发包括:(1) 束流流强数据采集。通过调用PXI-4070数字万用表驱动程序的API函数,配置PXI-4070数字万用表的初始状态,采集储存环束流流强信号;(2) 应用层软件。在EPICS框架下编写相应的设备支持模块(device support module),针对直流流强检测系统编制其相应的运行数据库,并对采集的原始束流流强数据进行数据处理,得到束流流强、束流寿命以及置信度等信息,具体的数据处理方法将在算法部分给出;(3) OPI(操作员界面)的编写。将运行数据库中的束流流强以及束流寿命等需要监控的信息显示在中控室的人机界面上。软件配置为:Mandriva Linux 2006;BaseR3.14.10;NI-DMM 2.5。
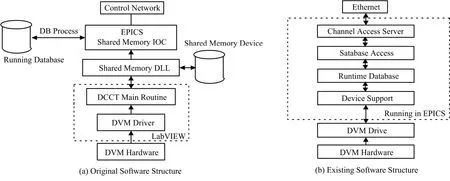
图2 系统软件结构Fig.2 Software structure of DCCT system.
3 算法优化
3.1 信号模型
分析SSRF储存环直流流强检测系统采集的流强数据,流强信号的组成为:PXI4070与NPCT175的联机噪声信号;束流的流强信号,其随时间的变化可描述为:I(t)=I0exp(–t/τ),其中,τ为束流寿命;I0为初始流强(设定为200 mA)。于是,束流流强信号的模型为:Is(i)=I0exp{–i/(fsτ0)},i=0,1,…,Tfs, 其中τ0为束流真实寿命,Is为流强采样值,fs为采样频率(设定为10 kHz),T为累积采样时间(设定为0.3 s)。由此计算得到一组无测量误差的流强采样数据。
在每个采样数据上叠加一个随机测量误差noise1(i)=A1random(1,TFs),不同采样频率下,噪声水平不同。因为恒流模式DCCT系统设定的DVM的采样频率为fs=10 kHz,则noise1(i)=0.016 random(1,TFs)[1];在上述数据基础上叠加一个单频干扰信号采样值 noise2(i)=A2sin(2πif/fs+ψ),其中A2为干扰信号振幅,f为单频干扰信号频率,ψ为初始相位。
3.2 束流流强算法
针对原系统的算术平均滤波算法,在不同的单频干扰振幅及单频干扰频率条件下,对计算值与真实值的偏差值进行了 Matlab仿真,仿真结果如图3(a)所示。考虑原始信号中的随机测量噪声以及单频干扰信号,当累积采样时间内刚好采集整数周期的单频干扰信号时,单频干扰信号将对算术平均值没有影响。所以对累积采样时间内采集的单频干扰信号最大整数周期的原始数据进行算术平均,而不是简单的对累积采样时间内采集的所有数据进行算术平均,这样可以减少与真值偏差。针对不同频率以及振幅的单频干扰信号,Matlab仿真结果如图3(b)所示。对整数周期算术平均算法而言,无论单频干扰信号的幅度多大,都可以保证束流流强偏差值小于1 μA。仿真程序中做FFT时所用点数为262 144,补0做FFT主要是为了提高计算分辨率,使求得的单频干扰频率更准确,从而使进行算术平均计算所需的原始数据点数更准确。针对整数周期算术平均算法,仿真不同振幅及频率的单频干扰信号对束流流强分辨率的影响,仿真结果如图3(c)所示。不同振幅以及频率的单频干扰信号下,束流流强的分辨率都好于0.38 μA。
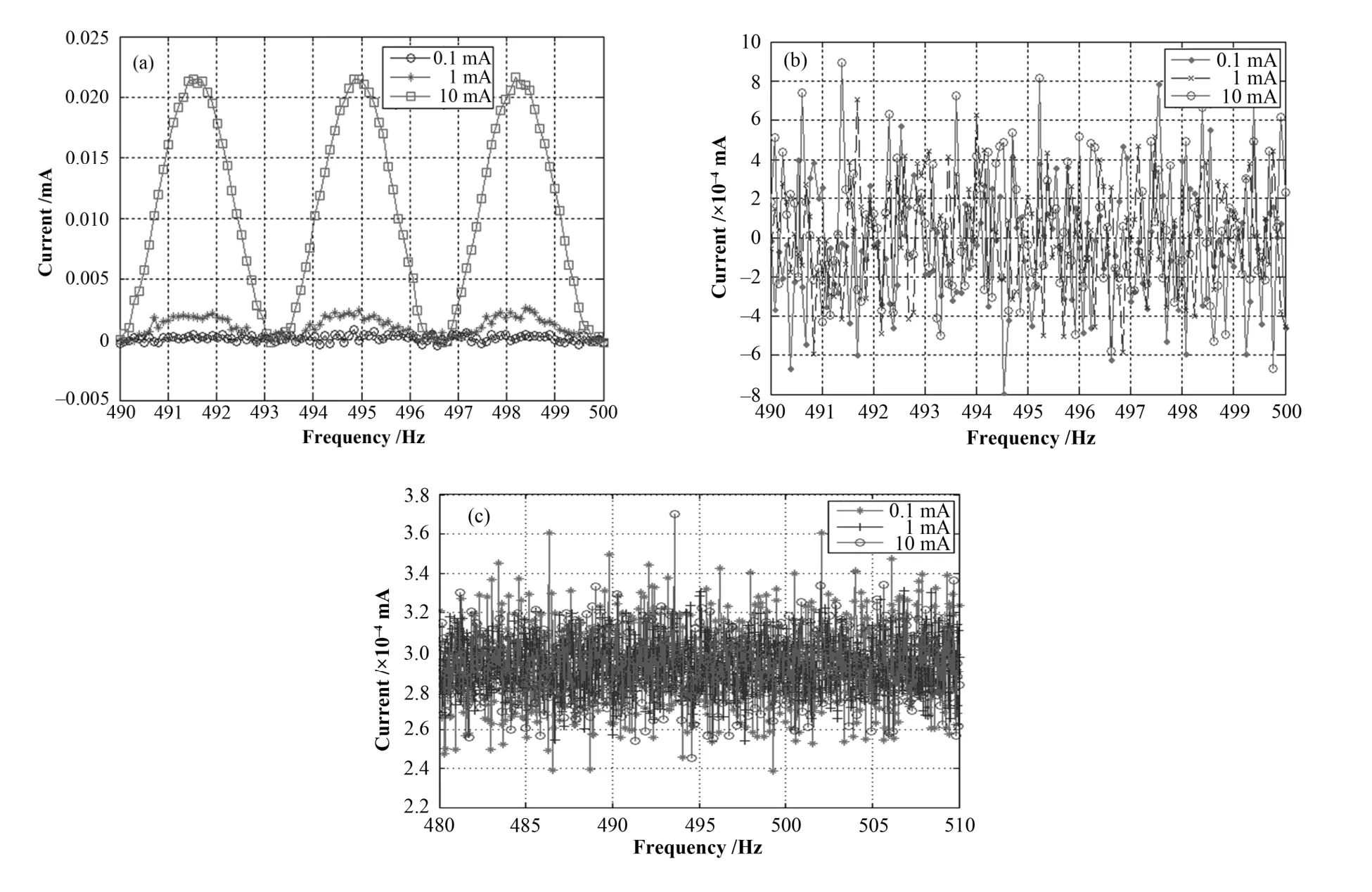
图3 算术平均算法的偏差值(a)、整数周期算术平均算法的偏差值(b)和整数周期算术流强分辨率(c)Fig.3 Deviations of arithmetic mean algorithm (a) and the integer cycle arithmetic mean algorithm (b),and resolution of integer cycle arithmetic mean (c).
3.3 束流寿命算法
Top-up模式下直流流强检测系统的束流寿命算法为曲线拟合算法,与 Decay模式相同,但由于Top-up模式下束流的特性不同于Decay模式,故用图4 中的(t1,I1)、(t2,I2)两点进行曲线拟合,于是
针对两点曲线拟合求束流寿命的方法,Matlab仿真结果如图5(a)所示。当单频干扰信号的振幅小于1 mA时,束流寿命的绝对偏差小于0.04 h。单频干扰信号的振幅为1 mA时,束流寿命的分辨率仿真结果如图5(b)所示。不同频率的单频干扰信号下,束流寿命的分辨率好于0.018 h。

图4 曲线拟合示意图Fig.4 The curve fitting schemes.
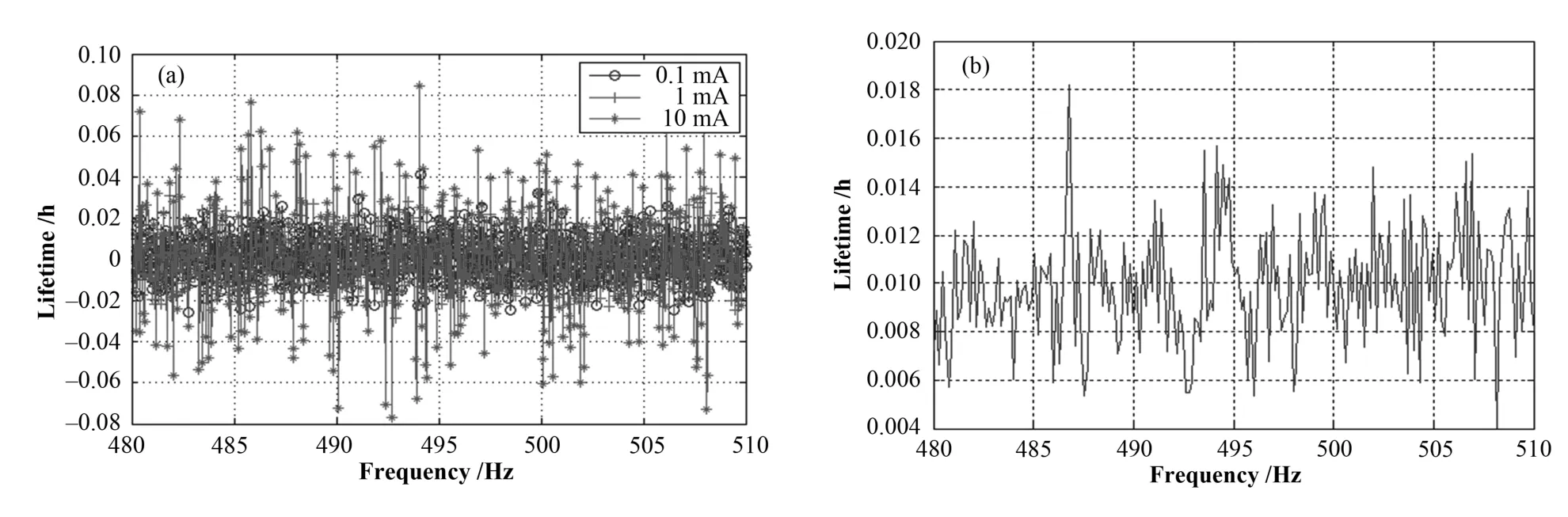
图5 曲线拟合束流寿命偏差(a)和束流寿命分辨率(b)Fig.5 Beam lifetime error of curve-fitting (a) and resolution of beam lifetime (b).
3.4 置信度算法
引入置信度算法,来确定直流流强检测系统每次给出的束流平均流强值以及寿命值的可信度,每次系统根据当前的状态来预测下一个数据,然后同依据采样数据计算得到的束流流强值以及寿命值进行比较,得差值,依据此差值给出实测值的可信度。置信度算法中主要是数据预测算法。我们使用Kalman算法,它是最优化自回归数据处理算法,无需保存先前的数据,进行新的测量时,也无需对原来数据进行处理。直流流强检测系统的 Kalman算法为:
(1)X(k|k–1)=2X(k|k) –X(k–1|k–1),其中X(k|k–1)是利用上一状态预测的结果,X(k–1|k–1)是上一状态最优结果;
(2)P(k|k–1)=P(k–1|k–1)+Q,其中P(k|k–1)是X(k|k–1)对应的协方差,P(k–1|k–1)是X(k–1|k–1)对应的协方差,Q为过程噪声的方差;
(3)Kg(k)=P(k|k–1)/[P(k|k–1)+R],其中Kg为卡尔曼增益(Kalman Gain),R为量测噪声的方差;
(4)X(k|k)=X(k|k–1)+Kg(k)[Z(k)–X(k|k–1)],其中Z(k)是k时刻的实测值;
(5)P(k|k)=(1–Kg(k))P(k|k–1),其中P(k|k)是X(k|k)对应的协方差;
(6)E(k|k)=X(k|k–1)–Z(k),其中E(k|k)是k时刻的预测值与实测值的差值。
给定下列变量的初始值:量测噪声的方差R,过程噪声的方差 Q,第一点的预测值X(1|0),第一点的协方差P(1|1),Kalman算法就会自动收敛。利用某次实测的数据进行Matlab仿真,数据预测算法仿真结果如图6(a)所示。置信度的仿真结果如图6(b)所示。

图6 数据预测算法仿真结果(a)和置信度仿真结果(b)Fig.6 Simulated result of data prediction algorithm (a) and simulation result of confidence level (b).
对比分析图6(a)与6(b),可分为以下几个阶段:
(1) 收敛阶段(1–5):第1个预测值是初值,与实测值差值大于160 μA,置信度为0,到第5个预测值时,与实测值差值小于10 μA,预测值的置信度为1;
(2) 稳定阶段(6–454):束流自然衰减,预测值与实测值差值小于10 μA,预测值的置信度为1;
(3) 突变阶段一(455–634):第 455个测量点,储存环掉束,预测值与实测值差值大于160 μA,置信度为0;从456点到634点,储存环中并无束流,预测值与实测值差值小于10 μA,预测值的置信度为1;
(4) 突变阶段二(635–653):束流注入过程,束流变换流强变化快,预测值跟随实测值变化;
(5) 收敛阶段(654–660):预测值与实测值差值慢慢减小,直到稳定在10 μA之内。
重复上述五个阶段,其中对于第三个阶段,若无掉束现象,第三个阶段就不存在。
3.5 软件实现
中央控制室需显示的参数是束流平均流强以及寿命等参数。Top-up模式下的束流流强测量以及计算方法通用于Decay模式,唯束流寿命算法不同。SSRF现尚运行于Decay模式,故选择两种模式结合的实施方案:在现有的软件模块上增加新的模块,实现Top-up模式下束流寿命的计算。软件的流程图如图7所示。
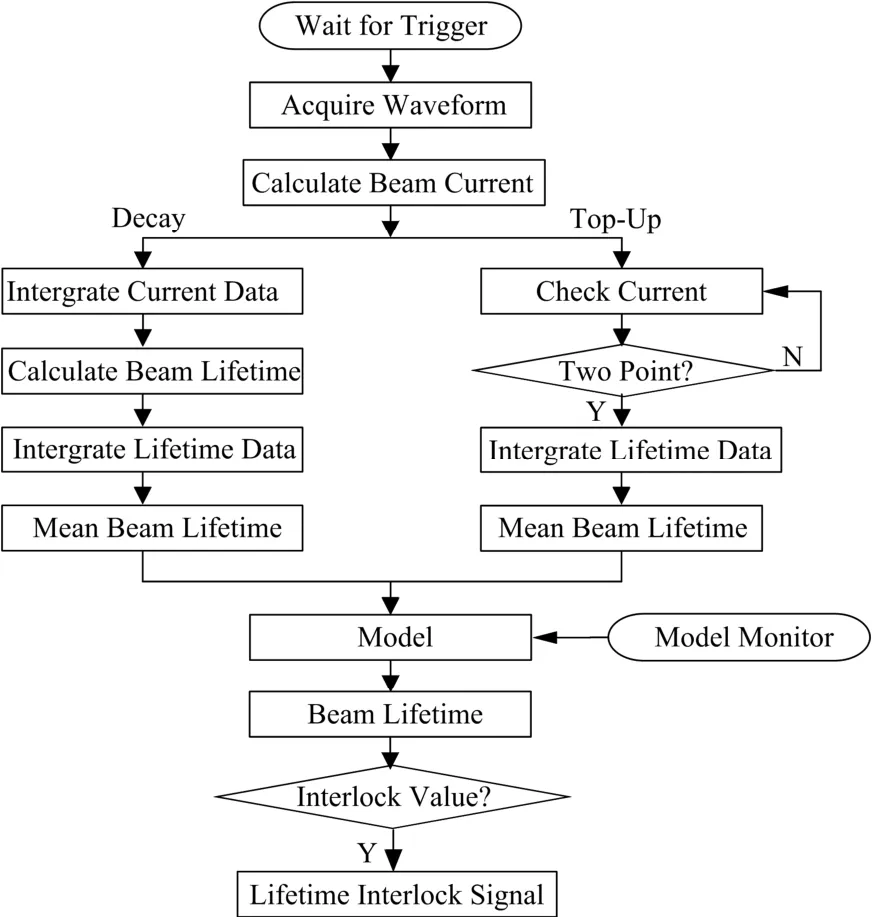
图7 直流流强检测系统软件流程图Fig.7 Flow chart of DCCT system.
4 结语
介绍了恒流模式下上海光源直流流强检测系统的软硬件结构。针对恒流模式下储存环束流的特性,对束流流强以及束流寿命算法进行了实验室仿真。提出了计算束流流强的整数周期算术平均算法以及计算束流寿命的两点曲线拟合法。引入了置信度算法对系统给出的束流平均流强值以及寿命值进行评估,实验室仿真结果显示,该算法准确、快速、高效。最后,给出了直流流强检测系统的软件流程图,实现了上海光源Decay与Top-up运行模式的统一。
目前,优化后的系统已在上海光源稳定地运行,下一步的重点工作是对代码的优化,提高代码的执行效率。对算法可能存在的缺陷进行优化,提高算法的效率、健壮性,提升整个系统的性能。
1 冷用斌, 周伟民, 陈永忠, 等. 上海光源储存环直流流强监测系统设计[J]. 核技术, 2007, 30(6): 477–480 LENG Yongbin, ZHOU Weimin, CHEN Yongzhong,et al. DCCT system design for SSRF storage ring[J]. Nucl Tech, 2007, 30(6): 477–480
2 Sreenivas T V, Rao P V S. FFT algorithm for both input and out—put pruning[J]. IEEE Transactions on Acoustics Speech and Signal Processing, 1979, ASSP-27(3): 291–292
3 Nagal K. Pruning the decimation in-time FFT algorithm with frequency shift[J]. IEEE Transactions on Acoustics Speech and Signal Processing, 1986, ASSP-34(4): 1008–10101
4 Schütte W. Algorithm for the lifetime/loss measurement with a high precision DC transformer[C], 4th European Particle Accelerator Conference, London, UK, 27 Jun-1 Jul 1994, 1631
5 Sreenivas T V, Rao P V S. High-resolution narrow-band spectra by FFT running[J]. IEEE Transactions on Acoustics Speech and Signal Processing, 1980, ASSP-28(2): 254–257
6 胡广书. 数字信号处理理论、算法与实现. 第2版[M].北京: 清华大学出版社, 2003: 169–192 HU Guangshu. Digital signal processing theory, algorithm and implementation. 2nd ed[M]. Beijing: Tsinghua University Press, 2003: 169–192
7 Kalman filter http://en.wikipedia.org/wiki/Kalman_Filter [OL]
猜你喜欢
核科学与工程(2021年4期)2022-01-12
环境保护与循环经济(2021年7期)2021-11-02
哈尔滨轴承(2020年1期)2020-11-03
中国奶牛(2019年10期)2019-10-28
原子能科学技术(2019年9期)2019-09-14
原子能科学技术(2019年9期)2019-09-14
电子制作(2018年23期)2018-12-26
计算机应用(2018年5期)2018-07-25
西北工业大学学报(2015年3期)2015-12-14
轴承(2015年2期)2015-07-25
