基于动态边缘检测的图像锐化算法
2012-11-26 09:01陈惠芳
杭州电子科技大学学报(自然科学版) 2012年4期
任 浩,谢 磊,陈惠芳
(浙江大学信息与电子工程系,浙江杭州310027)
0 引言
经过插值运算后的数码图像,噪声和伪色增加,使图像轮廓不明显,图像变得模糊不清。为了克服数码相机的缺陷,如摩尔纹、伪色和紫边效应,在结构设计中,一般要对图像进行算法处理,这些过程主要集中在数码相机图像处理模块中[1],是获得高质量数码图像的最重要途径。其中,为了补偿图像轮廓,增加图像的边缘信息,使图像变得清晰,通过增强对比度与锐度的方法增强图像的高频分量。对数码图像锐化算法的研究,主要是基于边缘检测的微分算法图像增强[2],通过增加边缘检测的方向,修改模板增强图像的边缘部分。而基于高斯-拉普拉斯和坎尼最优算子,频域高通滤波以及由休埃克尔和哈拉利克提出的拟合算子等基于边缘检测的图像增强算法,虽然经过处理的图像效果较好,但算法复杂度都比较高,运算开销较大。而数码相机对实时性要求较高,所以这些算法都达不到应用要求。基于此,本文提出了一种基于动态边缘检测的图像锐化算法,充分利用图像的时域特性与边缘检测,恢复图像在细节纹理、边缘、色彩方面的效果都较理想,对边缘噪声抑制较明显,且计算复杂度不高。
1 常用的锐化算法
常用的锐化算法主要有:线性空域锐化,微分法和频域高通滤波法。对线性空域锐化,因图像中的边沿或线条与图像频谱中的高频分量相对应,采用高通滤波可增强高频分量,使图像的边沿或线条变得清晰,实现图像的锐化,可采用卷积方法,即采用有限冲激响应线性滤波器,也即采用具有高通特性或高频提升作用的模板对图像进行处理;也可先用低通平滑方法,求出图像的低频分量,再从原图像中减去低频分量实现。最常用的微分方法是求梯度,如罗伯茨、蒲瑞维特、索贝尔、拉普拉斯算子梯度锐化[3],由于图像的内容各种各样,边沿的走向也各不相同,故应采用各向同性、旋转不变的线性微分算子才能适用于不同的边沿。由于梯度锐化的缺点是处理后的图像仅显示轮廓,灰度变化的部分因梯度值较小而显得很黑。数字图像的边缘与图像的高频分量相对应,高频滤波器可以让图像的高频分量顺利通过,让低频分量受到充分限制,从而达到图像锐化的目的[5]。常用的高通滤波有理想高通、巴特沃斯高通滤波、指数型高通和梯形高通。
2 基于动态边缘检测的图像锐化算法
基于动态边缘检测的图像锐化算法,首先进行颜色空间转换,将RGB颜色空间转换成YCbCr空间,其次划分检测窗口,每固定的5×5个象素作为一个小检测窗口,通过比较连续两帧图像,检测动态区域,然后使用边缘检测算法检出图像的所有边缘信息,进而设定阈值判决哪些是真正的边缘,哪些应被视为噪声,最后对认定为边缘的象素进行锐化,而未认定为边缘的象素保持不变。
2.1 颜色空间转换
在RGB色彩空间,无论采用哪种锐化算法,都会引起图像色彩的变化,因为人的肉眼对视频的明亮度分量更加敏感。同时,为了减小运算量,降低运算复杂度,将色彩空间RGB转换成YCbCr色彩空间,只对明亮度分量Y进行处理。
YCbCr色彩空间与RGB色彩空间之间相互转换的公式如下(R,G,B取值范围均为0~255):

2.2 动态检测
Duncan滤波是基于当前窗口的原始图像数据及前一帧参考窗口的数据,根据特定的窗口大小选择其中的有效数据,然后按照某种权值分配进行加权平均,从而得到滤波后的结果[4]。
选取5×5个象素作为一个检测窗,将连续两帧图像分别进行分割,比较前后两帧相同位置的检测窗口,如果总和的绝对差SAD大于门限值,则判为动态区域,用灰色表示;如果SAD小于门限值则判为静态区域,用黑色表示。如果检测到动态变化,则用后一帧的数据作为当前象素点的数据值,前一帧的数据被丢弃,如果检测不到动态变化,则前后两帧的数据都可被使用。
动态检测门限值的运算是由随机高斯噪声的标准偏差σ决定。一般情况下,背景噪声可以看成加性高斯噪声。加性高斯噪声具有一个重要的性质:在区间[μ-σ,μ+σ],采样点约占总点数的68%;在区间[μ-2σ,μ+2σ],采样点约占总点数的95%;在区间[μ-3σ,μ+3σ],采样点约占总点数的99%,其中μ和σ分别表示高斯分布的均值和标准差。阈值选择时利用了该性质,设动态检测后的象素值为f(x,y),则当SAD≥15σ时,判为动态图像;当SAD〈15σ时,判为静态图像,其中σ=5。
2.3 边缘检测
边缘指图像中象素值有突变的地方。常用的边缘检测方法有一阶导数和二阶导数方法。在改进方法中,在原模板算法基础上,增加了两个方向以提高边缘提取的精度,同时合理设置参数,避免一些伪边缘的提取。在静态图像的边缘检测部分,使用改进形式的索贝尔算子模板进行检测,同时考虑前一帧对应象素点周围的象素值。若当前帧象素值定义为a1,前一帧相同位置象素值定义为a2。用a1,a2分别卷积相同的模板M1,分别取最大值,求平均后作为当前象素点的新灰度值。使用的模板M1(水平、垂直、45°、135°)是。当前帧取最大值时对应的模板所表示的方向为该象素点的边缘方向。
在此,引入一个非负门限值T,设|G|表示该象素的新灰度值,当|G|≥T时,判定该点是图像边缘;否则,判定该点不是图像边缘。T采用动态阈值。若采用固定阈值,易产生伪边缘;若阈值设置过大,易使边缘间断。因为人眼对图像灰度的分辨率较差,且对图像平缓部分的噪声较敏感。
人类的视觉系统,按照“韦伯法则”描述,在高亮区域的噪声敏感度较小,在黑暗区域的噪声敏感度较大;根据“结构噪声掩膜”性质,在边缘和突变性较大区域的噪声敏感度较小,在平滑区域的噪声敏感度较大。因此,在阈值设置时,对于边缘和突变性较大的区域,视觉分辨率较高,噪声敏感度较小,相应的设置较高的阈值;相反,对于平滑的区域,视觉分辨率较低,噪声敏感度较大,相应的设置较低的阈值。由实际经验和实验结果可知,在白色区域,人眼分辨率最低;其次是黑色区域,再次是灰度级为127左右的区域,而人眼比较敏感的是灰度级为48、206左右的区域。
人眼对灰度的敏感度不是随着灰度值线性变化的。根据经验,采用抛物线计算阈值比较合理,即灰度级在[0,48]、(48,206)和(206,255)区域,阈值计算式为 T(x)=ax2+bx+c。所以,当 x=0时,T(x)=15;当 x=-48 时,T(x)=4;当 x=48 时,T(x)=4,即 a=-0.001 738,b=0.000 072,c=15。当 x=127 时,T(x)=10;当 x=48 时,T(x)=4;当 x=206,T(x)=4,即 a=-0.000 491,b=0.125 635,c=-2.030 474。当x=255时,T(x)=50;当 x=206时,T(x)=4;当 x=304时,T(x)=4,即 a=-0.009 579,b=4.885 464,c=-595.896 710。通用阈值计算式为:

如果检测到是动态的,则只是考虑当前帧的象素点,采用相同的索贝尔算子进行检测,取最大值为象素点的新灰度值,该最大值对应的模板所表示的方向为该象素点的边缘方向。T相同方法获得。
2.4 边缘锐化
对检测出是边缘的静态图像,用空时锐化进行处理,分别考虑前后两帧的图像信息,设当前帧象素值定义为a1,前一帧同一象素值定义为a2,使用相同的模板M2,用a1,a2分别卷积模板M2,分别取最大值,求平均后作为当前象素点锐化后的值。对检测出不是边缘的静态图像部分,则不做处理,保持不变。通常,经过梯度算子处理,虽然锐化后的图像边缘在一定程度上被加亮,但效果不够明显,仅能一定程度去掉图像的模糊;而经过拉普拉斯算子处理的图像,其图像边缘得到了一定程度的加强,但是图像横向条纹变严重,加剧了图像的非均匀性,此外,如果提高锐化倍数,引入的噪声也随着加倍增大。因此,将传统的梯度算子与拉普拉斯算子结合,采用一种将两种算法相结合的模板。

对检测到有动态变化的区域,通过边缘检测后,也分两种情况,如果是边缘的部分,采用空域锐化,只考虑当前帧图像信息;否则,保持不变,不进行锐化。
2.5 整体锐化
按照g(x,y)=f(x,y)+C(l(x,y)),其中f(x,y)是原图,C是常数,用以控制图像的锐化程度,l(x,y)是对已检测出的图像边缘部分进行锐化后的图像。最后,将YCbCr转换成RGB分量为:

3 仿真结果与分析
通过捕获连续两帧图像进行分析。选取Bear和Fish连续两帧动态图,即前后两帧有动态变化,采用空域锐化的方式;选取Lighthouse和Lenna进行静态图像比较,即前后两帧没有动态变化,只采用时域锐化的方式,测试图如图1所示。采用本文提出的基于动态边缘检测的图像锐化算法后的效果图如图2所示,对不同测试图像采用各种锐化算法时的运算延时比较如表1所示,单位是s。所有锐化算法都采用MatLAB进行仿真[6],且在配置AMD双核处理器,2.71GHz主频与2GB内存的计算机上运行这些算法。图2中锐化效果图可见,提出的方法改善了原图的清晰度,突出了边缘轮廓,在增强了图像边缘的同时,原图中的细微噪声信号没有被放大,也未引入新噪声,这种改进后的图像锐化算法在很大程度上减少了边缘轮廓增强时噪声随之增强对图像的影响。同时,从表1也可看出,与常用的3种锐化算法比较,在相同仿真环境下,本文提出的方法计算开销最小。
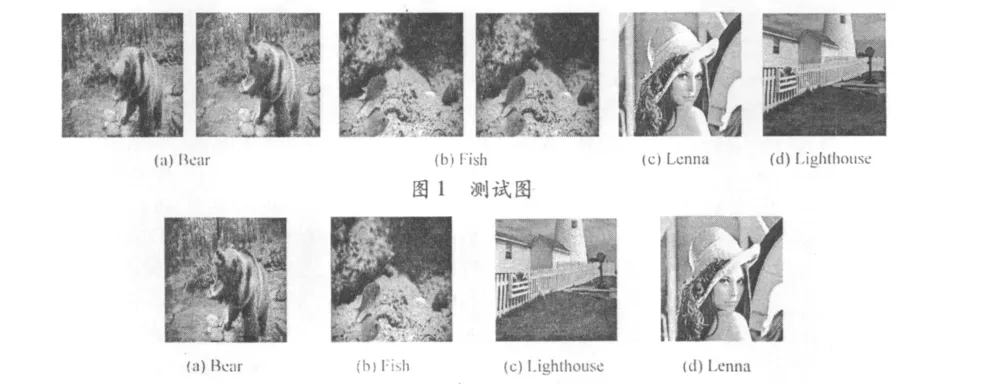
图2 图像锐化效果图

表1 不同测试图像采用各种锐化算法时的运算延时(s)
4 结束语
本文提出的图像锐化算法,充分利用图像的时域特性和边缘检测,恢复的图像在细节纹理、边缘以及色彩方面的效果都比较理想,对边缘的噪声抑制比较明显,在整个锐化的过程中,引入新的噪声较少,同时相对于常用的蒲瑞维特锐化,索贝尔锐化和拉普拉斯锐化算法,在同等仿真环境下,本算法具有运算复杂度较低的优点。
[1] 徐之海,李奇.现代成像系统[M].北京:国防工业出版社,2001:32-43.
[2] 唐慧明.数字图像处理讲义[M].杭州:浙江大学,2008:25-37.
[3] 吴海波,刘钊.基于拉普拉斯算子的彩色图像锐化处理[J].电脑开发与应用,2008,21(9):27-28.
[4] BoscoA,Findlater K,Battiato S,et al.A Noise Reduction Filter for Full-Frame Data Imaging Devices[J].IEEE Trans.on Consumer Electronics,2003,49(3):676-682.
[5] SongY,Lee C,Ho Y-S,et al.Adaptive Depth Boundary Sharpening for Effective View Synthesis[C].Krakow:2012 Picture Coding Symposium,2012:73-76.
[6] 徐飞,胡晓军.MATLAB应用图像处理[M].西安:西安电子科技大学出版社,2011:216-230.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2021年2期)2021-06-09
基层中医药(2021年12期)2021-06-05
应用数学(2020年2期)2020-06-24
智族GQ(2019年9期)2019-10-28
数学年刊A辑(中文版)(2018年2期)2019-01-08
英美文学研究论丛(2018年1期)2018-08-16
通信产业报(2016年44期)2017-03-13
电测与仪表(2014年23期)2014-04-04
雕塑(1999年2期)1999-06-28