
模糊控制在污水技术评估实验室温控系统中的应用
2012-12-25 00:56张伟许春莲黄海明马爱君武少伟
环境工程技术学报 2012年6期
张伟,许春莲* ,黄海明,马爱君,武少伟
1.中国环境科学研究院,北京 100012
2.山东电子职业技术学院,山东 济南 250200
为适应我国环境保护技术的快速发展,有效提升环境保护能力,开展了水污染防治生物技术实验室验证评估。通过对生物处理新技术全面客观的验证评估,可以有效地进行新技术推广,推动环保技术的创新发展。在实验室验证评估过程中,为满足微生物的生存需要,验证评估用的原水需具有适当和稳定的温度。按照工艺流程,来自居民楼的生活污水首先经格栅处理后与冷冻液进行热交换,变为5℃的实验用原水,然后通过加药进行水质调整,使水质保持在稳定的范围内,进入污水处理设备前需经过与65~80℃热水进行热交换使水温达到13~20℃,以满足验证评估客观性和科学性的要求。
由于温度控制系统具有不确定、非线性、大滞后等特点,常规的PID控制难以满足验证评估所需原水温度控制要求[1]。1964年美国的Zadeh教授创立了模糊集合理论,1974年英国的Mamdani研制出第一台模糊控制器。模糊控制器不需要了解对象的精确数学模型,根据专家知识进行控制,用模糊控制器实现对温度控制系统的控制,大大改进了原系统的控制效果,在一定程度上满足了系统快速性的要求[2-6]。针对生物处理技术实验室验证评估过程中原水升温控制系统,笔者设计了一种自适应模糊控制器,根据温控系统中热交换器后原水温度的反馈,通过模糊规则推理和决策,在线整定控制参数,以实现对验证评估用原水温度的自适应控制。
1 原水温度控制系统
水污染防治生物处理技术实验室验证评估过程中,进入生物技术处理流程的原水应具有合适、稳定的温度。收集于生活区的原水经过低温储存、水质调整,与锅炉提供的热水通过热交换器,水温升至验证所需的温度后,直接进入生物技术处理流程,开始验证评估工作。温度控制系统主要是保证原水出水有恒定的预设温度,控制元件是热水调节三通阀,该阀门控制流经交换器热水的流量,将预设定的原水温度作为给定值,经热交换后原水的温度作为反馈值,阀门的开度作为输出值,以保证流入生物技术处理单元的原水温度的恒定。原水温度控制系统原理如图1所示。

图1 温度控制系统原理Fig.1 The principle diagram of temperature control system
2 模糊控制器设计
由于被控对象的复杂性(非线性),难以建立精确的数学模型,因此,有关被控对象的知识主要来源于领域专家或操作人员的知识和经验。针对验证评估中的温度控制系统,通过控制原理可以确定基本控制策略。因此设计一种自调整模糊控制器,可实现动态和稳态性能很好的控制。模糊控制器结构如图 2 所示[7-9]。
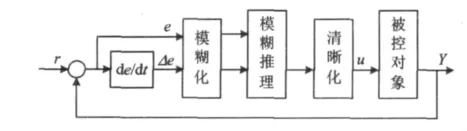
图2 模糊控制器结构Fig.2 The structure diagram of fuzzy controller
在运行中不断地检测偏差和偏差变化率,将其输入模糊控制器进行模糊化,运用模糊推理,进行模糊运算,对输出控制量在线修改并清晰化,作用于被控对象,使被控对象具有良好的静态及动态性能。模糊控制器的设计分为清晰量的模糊化、模糊控制规则和模糊量的清晰化三部分。
2.1 清晰量的模糊化
在模糊控制系统运行中,控制器的输入值、输出值是有确定数值的清晰量,而在进行模糊控制时,模糊推理过程是通过模糊语言变量进行的,因此需将物理量的清晰值转换成模糊语言变量。
该控制器中各语言变量的论域设定如下:

为计算机处理方便且不影响仿真结果,在该控制器中论域E、EC及U等语言变量的隶属函数取三角函数(图3)。
2.2 模糊控制规则

图3 E、EC及U的隶属函数Fig.3 The membership function of E,EC and U
模糊控制规则是基于手动控制策略建立的,而手动控制策略又是人们通过学习、实验以及长期经验积累而逐渐形成的[3]。从系统的稳定性、响应速度、超调量和稳态精度等各方面考虑,根据过程模糊模型生成控制规则。当偏差较大时,对偏差给予较大权重,以尽快消除误差,提高响应速度;当偏差较小时,为避免系统超调,对偏差变化率的影响给予较大的权重,以尽快进入稳态[10-12],据此生成模糊控制规则,如表1所示[2]。为表明论域E、EC及U之间的控制关系,根据模糊控制规则生成的模糊控制规则表面如图4所示。

表1 模糊控制规则表Table 1 Regulations of fuzzy control
2.3 模糊量的清晰化
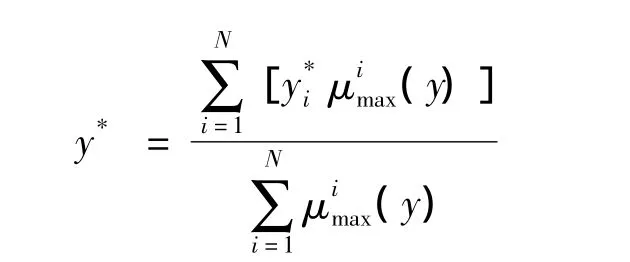
经过模糊推理决策,整定的输出量要进行清晰化取得精确值以计算输出控制量,即热水调节电动阀的开度。常用的清晰化方法包括最大隶属度法、重心法、中心平均法等。该控制器中采用中心平均法求取输出量的精确值。
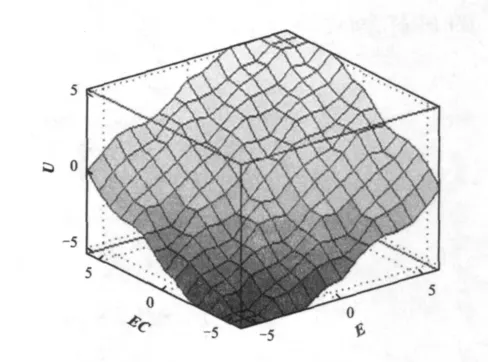
图4 模糊控制规则表面Fig.4 Rules surface of fuzzy control
中心平均法既避开了求取隶属函数的积分运算,同时又考虑了各模糊集合对精确值的影响。该方法计算较简单,清晰化的鲁棒性较好,是模糊推理系统中常用的方法[7]。中心平均去模糊化方法公式:
3 模糊控制器应用
热交换器系统模型可以用纯滞后环节和一阶惯性环节表示。对于水污染防治生物处理技术实验室验证评估过程中的热交换系统,函数模型可表示如下:
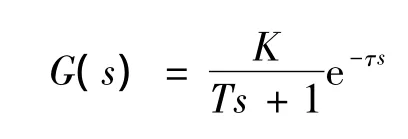
式中,K为增益系数,取值5;T为时间常数,取值3500 s;τ为滞后时间,取值200 s;s为时间变量。
在Matlab7.0工作环境下,利用模糊推理系统编辑器建立一个fis文件,定义为flc.fis。在Simulink仿真环境下,根据图2的模糊控制器结构利用工具箱编辑系统框图,输入为偏差论域E和偏差变化率论域EC,输出为温控系统模型输出,并增加积分环节与模糊控制器输出进行叠加,以消除静态误差,然后与被控对象温控系统的模型相连接,输出反馈到控制器输入端,得到控制器与一阶滞后被控对象组成的控制系统仿真框图,如图5所示。

图5 模糊自调整控制系统仿真Fig.5 Simulation block diagram of fuzzy self-adjustment control system
4 仿真结果与分析
在单位阶跃输入下,通过调整量化因子(kE,kEC)和控制增量比例因子(kU),可得到比较理想的模糊控制仿真结果。kE取值1.35,kEC取值0.98,kU取值1.05,kI取值0.0016。对积分环节采取限幅,该次仿真实验中限幅为0.2。利用仿真参数对话框,设置相关的仿真参数,仿真时间设置为5000 s,采样周期设置为1 s。对热交换器分别采用常规PID控制器和模糊自调整控制器进行调节,其中PID控制器参数按临界比例法[13]进行调整,两种控制器系统的单位阶跃响应如图6所示。

图6 两种控制器系统的单位阶跃响应Fig.6 Response of two control system on step signal
由图6可知,利用模糊自调整控制器与比例积分环节控制量叠加后,可消除静差,减小超调量,响应速度快,调节时间短。与常规PID控制器相比,模糊自调整控制器具有良好的快速性和鲁棒性,提高了系统的动、静态性能。
5 结语
针对大滞后的温度控制系统,与常规PID控制器相比,采用模糊自调整控制器可以使系统的动态性能和稳态性能得到改善,具有良好的控制效果。但通过仿真结果可以看出,控制器缺乏较强的自适应能力,系统仍有一定的超调量。因此,在今后研究中考虑综合神经网络、遗传算法的智能控制器,在线训练模糊规则、调整量化因子等,以优化温控系统的动态性能和鲁棒性,实现控制目的。
[1]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[2]孙增圻.智能控制理论与技术[M].北京:清华大学出版社,2003.
[3]易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,2003.
[4]YANG X H,LIU T R,SUN J.Optimal PID control of heat exchanger temperature[J].Advanced Materials Research,2011,204/205/206/207/208/209/210:21-24.
[5]PADHEE S,SINGH Y.A comparative analysis of various control strategies implemented on heat exchanger system:a case study[C]//Proceedings of the World Congress on Engineering:Ⅱ.London:International Association of Engineers,2010.
[6]MAIDI A,DIAF M,CORRIOU J.Optimal linear PI fuzzy controller design of a heat exchanger[J].Chemical Engineering and Processing,2008,47(5):938-945.
[7]MAZINAN A H,SADATI N.Fuzzy predictive control based multiple models strategy for a tubular heatexchanger system[J].Applied Intelligence,2010,33(3):247-263.
[8]ARTURO P,CLAUDIA R,KEVIN P,et al.On-line fuzzy-logicbased temperature control of a concentric-tube heat exchanger facility[J].Heat Transfer Engineering,2009,30(14):1208-1215.
[9] ŞAHIN ŞENCAN A,KILIÇ B,KILIÇ U.Optimization of heat pump using fuzzy logic and genetic algorithm[J].Heat and Mass Transfer,2011,47(12):1553-1560.
[10]MAZINAN A,SADATI N.Fuzzy multiple models predictive control of tubular heat exchanger[C]//2008IEEE World Congress on Computational Intelligence. Piscataway:IEEE Press,2008:1845-1852.
[11]HABBIA H,KIDOUCHEA M,KINNAERTB M,et al.Fuzzy model-based fault detection and diagnosis for a pilot heat exchanger[J].International Journal of Systems Science,2011,42(4):587-599.
[12]TABATABAEE S,ROOSTA P,SADEGHI M S,et al.Fuzzy PID controller design for a heat exchanger system:the energy efficiency approach[C]//International Conference on Computer Applications and Industrial Electronics(ICCAIE). Los Alamitors:IEEE Computer Society Press,2010:511-515.
[13]李园,李平.填料塔热交换系统的模糊模型PID优化控制[J].工业仪表与自动化装置,2006(5):50-53.○
猜你喜欢
供水技术(2022年1期)2022-04-19
环球时报(2020-08-11)2020-08-11
小猕猴智力画刊(2019年9期)2019-11-08
机电工程技术(2018年10期)2018-12-06
中国资源综合利用(2017年1期)2018-01-22
水科学与工程技术(2016年1期)2016-07-12
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
