
自行高炮射击线稳定系统动力学建模与仿真
2013-02-28 08:07李伟韩崇伟张太平赵维陈腾飞
兵工学报 2013年10期
李伟,韩崇伟,张太平,赵维,陈腾飞
(西北机电工程研究所,陕西 咸阳 712099)
0 引言
自行高炮(SPAA)具有的行进间射击性能是其战术发展的需要,实现该性能的关键部件之一就是射击线稳定系统。它在SPAA 行进间射击时,控制高低和方向伺服电机驱动武器线趋近射击线[1],并克服载体运动对射击线跟踪性能的影响。该稳定系统属于双轴稳定结构,承载着火炮、雷达、光电跟踪等设备,具有较大的负载自重比,模型复杂,承受较大的射击冲击干扰。
国内外对用于瞄准线稳定的弹载、机载、车载等稳定平台的研究较为深入,建立了稳定平台的运动学和动力学模型,研究了平台的动力学特性,既有仿真分析,还有实验研究[2-7]。坦克早已采用射击线与瞄准线独立的指挥仪式火控系统[8]而具有行进间射击性能,而SPAA 由于受大功率伺服控制技术的限制,使得对射击线稳定的研究停留在解算式位置稳定[9-10]阶段。仅在停止间射击冲击对车体姿态扰动下研究了陀螺速率补偿的独立式射击线稳定[11],无法在车体颠簸摇摆的情况下使用。尚未查到关于射击线稳定系统的动力学分析文献,本文以中炮配置的SPAA 为研究对象,系统地建立了采用直驱式射击线稳定系统的欧拉动力学模型(暂不含电机控制模型)。
1 应用的坐标系
SPAA 射击线稳定系统采用方向轴和俯仰轴控制的两轴稳定,方向轴控制为方向力矩电机直接驱动炮塔带动火炮俯仰部分和光电搜索跟踪设备进行回转,俯仰轴控制为俯仰力矩电机直接驱动火炮俯仰部分作俯仰运动,利用旋转变压器检测相对转角。为了便于建模,假设车体、炮塔、火炮俯仰部分为刚体,并沿用传统SPAA 火控坐标定义习惯,建立大地坐标系Onxnynzn、车体坐标系Obxbybzb、炮塔回转体坐标系Ohxhyhzh、火炮俯仰部分坐标系Opxpypzp.大地坐标系:原点取在车体重心,Onxn为平行水平面指向东,Onyn为平行水平面指向北,Onzn与Onxn、Onyn垂直指向上并满足右手定则。车体坐标系:原点取在车体重心处,Obxb为车体纵轴指向前方,Obyb为车体横轴指向右,Obzb与车体竖轴同向。炮塔回转体坐标系:原点取炮塔的回转中心上,Ohxh平行于回转平面指向武器线方向,Ohzh与方向回转轴重合指向上,Ohyh由右手定则决定,Ohzh与Obzb同向。火炮俯仰部分坐标系:原点取火炮俯仰转动中心,Opxp指向武器线方向,Obyb与Ohyh同向,Opzp由右手定则决定并指向上。
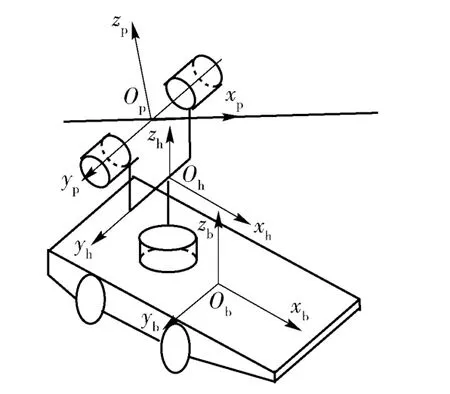
图1 SPAA 武器线稳定坐标示意图Fig.1 Coordinate schematic diagram of the weapon line stability of SPAA gun
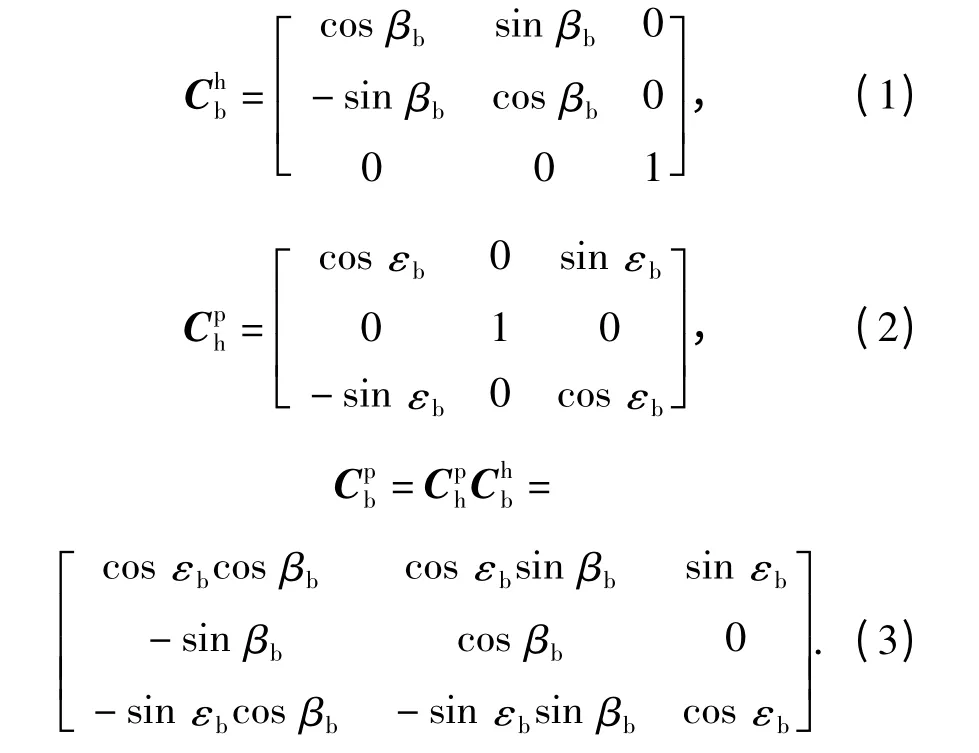
车体坐标系Obxbybzb绕Obzb转动βb角并平移一定距离得到炮塔回转体坐标系Ohxhyhzh,二者关系可用示。炮塔回转体坐标系Ohxhyhzh绕Ohyh转动εb角并平移一定距离得到火炮俯仰部分坐标系Opxpypzp,二者关系用表示。车体坐标系Obxbybzb与火炮俯仰部分坐标系Opxpypzp的关系用表示。
2 稳定系统双轴动力学模型
2.1 运动学模型
车体运动包含姿态和航向运动,将车体运动角速率ωb转换到炮塔回转体坐标系上,并考虑炮塔相对车体的旋转角速率,炮塔回转体的旋转角速率
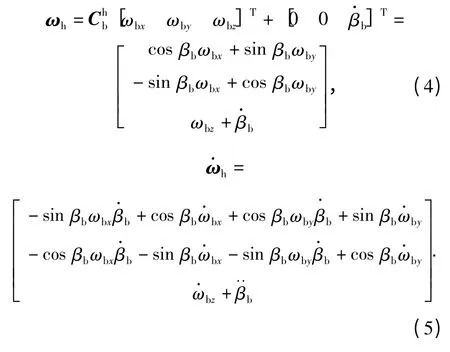
将炮塔回转角速率转换到火炮俯仰部分坐标系上,并考虑火炮俯仰部分相对炮塔的高低旋转角速率,火炮俯仰部分的旋转角速率
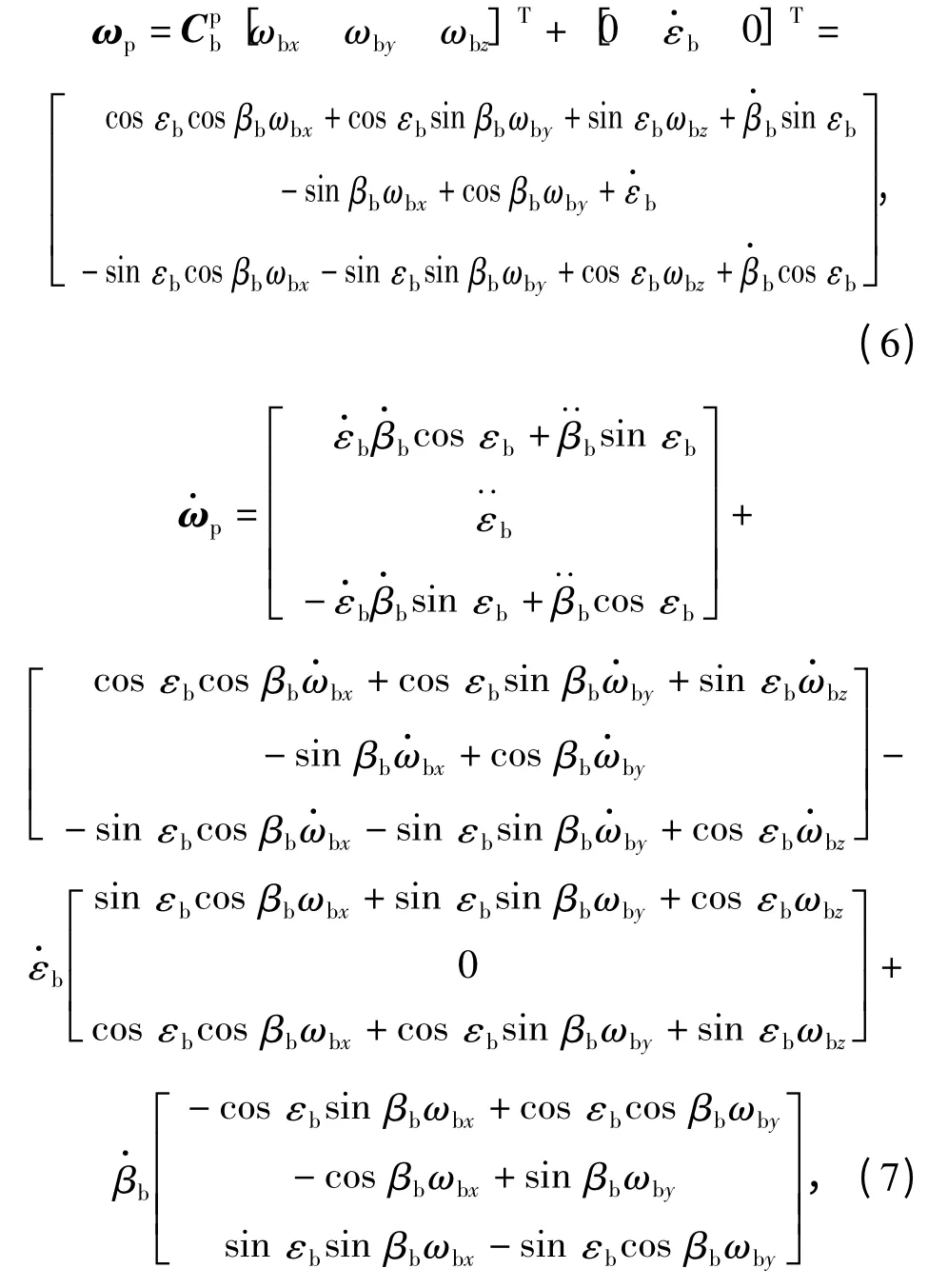
式中:ωb=[ωbz,ωby,ωbz]=为车体坐标系下的转动角速率分量;为车体运动角加速度;ωh、分别为炮塔回转总的角速度、角加速度;ωp、分别为火炮俯仰部分总的角速度、角加速度分别为炮塔相对车体旋转的速度、加速度分别为火炮俯仰部分相对炮塔转动的速度、加速度。
2.2 动力学模型
2.2.1 火炮俯仰部分
火炮俯仰部分的动力学基本公式为

式中:Mp=[MpxMpyMpz]T为火炮俯仰部分惯性力矩;Jp为火炮俯仰部分惯量阵,含俯仰伺服电机转子转动惯量。为简化分析,设火炮俯仰部分转轴与惯性主轴一致,则火炮俯仰部分惯量阵为对角阵,即Jp=diag(Jpx,Jpy,Jpz).将(8)式写成分量形式:
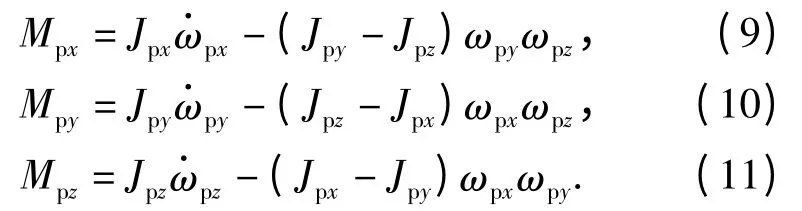
考虑俯仰控制轴Obyb中的伺服电机控制力矩Mpc、火炮俯仰部分结构质量不平衡和加速度引起的偏心力矩M'pe、俯仰轴承受的射击冲击力矩Mps、俯仰摩擦力矩Mpf,它是ε·b的函数;平衡机、弹链及其软导引的弹性力矩Me后,有

式中:Me为弹链及其软导引的弹性力矩;Kel为弹链及其软导引的综合弹性系数;fn(εb)为平衡机、弹链及其软导引的非线性或不可精确建模,即未知扰动。将各参量带入(12)式中进行推导,得到火炮俯仰部分动力学模型为

式中:
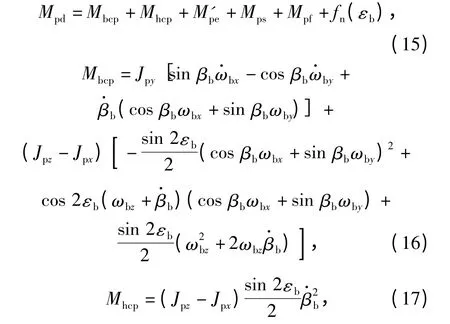
式中:Mpd为火炮俯仰部分干扰力矩总和;Kp为弹簧拖拽式高低平衡机、弹链及其软导引的综合弹性系数;Mbcp为车体对火炮俯仰部分的交叉耦合力矩;Mhcp为炮塔回转体对火炮俯仰部分的交叉耦合力矩。
2.2.2 炮塔回转体
炮塔回转体动力学基本公式为

式中:Mh=[MhxMhyMhz]T为炮塔回转体惯性力矩;Jh=diag(Jhx,Jhy,Jhz)为方向炮塔惯性矩阵;Mp为俯仰部分对回转体的反作用力矩。将(18)式对炮塔回转轴写成分量形式为

考虑炮塔回转体伺服电机控制转矩输出Mhc,炮塔回转体以为变量的摩擦力矩Mhf,炮塔回转体结构质量偏心引起的不平衡力矩Mhe,炮塔回转轴所受到射击冲击力矩Mhs.根据牛顿运动定律,(19)式可简化为

将各参量带入(17)式推导并化简得炮塔回转体动力学模型:
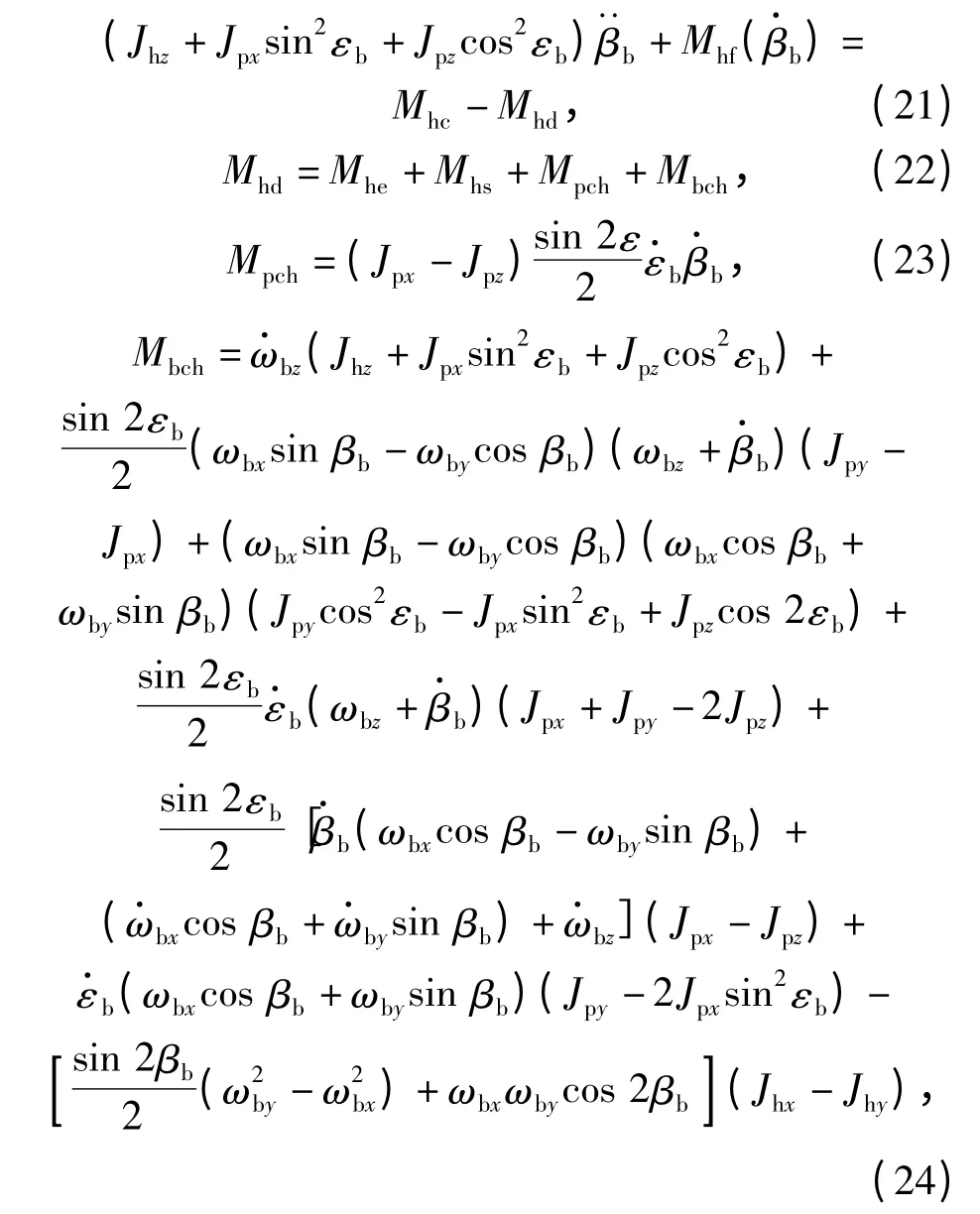
式中:Mhd为炮塔回转体所受干扰力矩总和;Mpch为火炮俯仰部分对炮塔回转体的交叉耦合力矩;Mbch为车体对炮塔回转体的交叉耦合力矩。
2.3 因结构质量偏心引起的不平衡力矩
炮塔回转体总体结构设计布置中,受火炮火线高设计要求,及雷达、光电等其他系统部件的尺寸、质量等影响,难以做到火炮俯仰部分、炮塔回转体部分的中心与各自的重心重合,存在质量偏心。因此,载体线振动产生的过载会通过质量偏心对各个轴系形成干扰力矩,并随着质心转动的空间位置不同而变化。令载体坐标系下载体的线加速度其中:gb为火炮俯仰坐标系下的重力加速度为车载惯性导航系统加速度计输出值。其结构偏心如图3 所示。
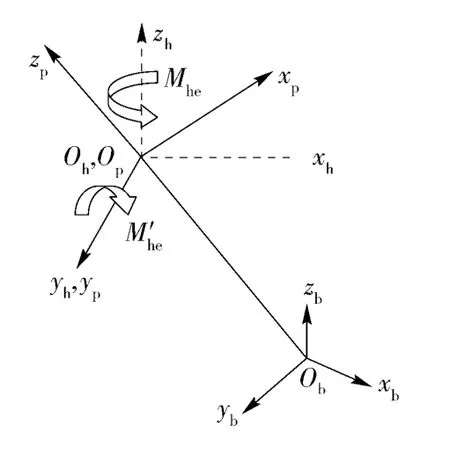
图3 结构偏心示意图Fig.3 Eccentric structure
为便于求解Mhe,将投影至炮塔回转体坐标系中,此时炮塔质量及质心位置不变。故,炮塔回转体的线加速度ah=[ahxahyahz]T,得

同理,将ah投影至火炮俯仰坐标系中得火炮俯仰部分的线加速度ap=[apxapyapz]T,有

火炮俯仰部分的重心偏移量投影至炮塔回转体坐标系下,有

炮塔回转体重心偏移主要为[xh,yh,zh],Ohzh轴上的不平衡力矩Mhe为由炮塔和火炮俯仰部分二者作用的结果,得

式中:mh为炮塔回转体质量;mp为火炮俯仰部分质量;[xp,yp,zp]为火炮俯仰部分重心距回转中心的偏心距向量。平衡机用于最大限度抵消俯仰部分的质量偏心引起的不平衡力矩,其结构简化后如图4 所示。图4 中h1和h2为滑轮,h1的半径为r1;A 为炮尾钢丝绳挂点,与Opxp的夹角为(360° -α),A 至Op的距离为LA;h1与Op的相对坐标为(x1p,y1p).根据简单几何关系可得Opyp轴上的不平衡力矩为


式中:Ke为平衡机弹性系数;Rpl为拉力力臂;Δl 为弹簧压缩行程;Rpl和Δl 分别为εb的函数,将会给控制系统引入非线性因数。
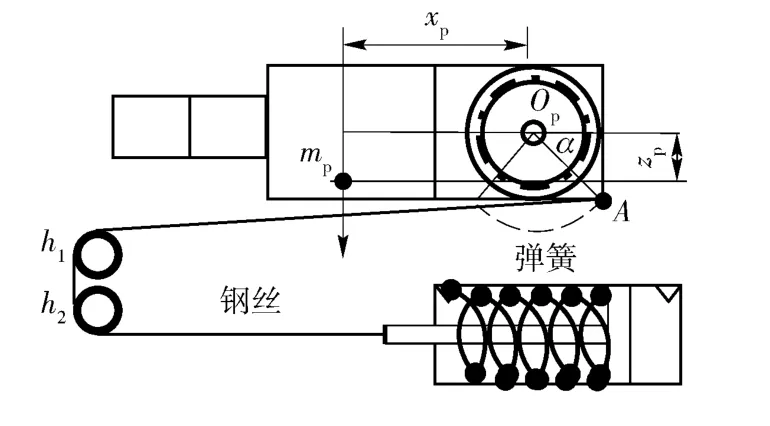
图4 火炮俯仰部分的平衡机示意图Fig.4 Schematic diagram of balancing machine of elevation part
2.4 射击冲击力矩
在结构布置中,火炮射击冲击力不通过回转中心时,产生射击力矩,它将对轴系和车体的姿态产生干扰。在此只考虑轴系干扰,而在射击冲击力矩激励下引起车体姿态的变化,涉及SPAA 武器系统的射击动力学范畴。由射击冲击力矩、路谱等综合因素激励下的车体姿态变化作为已知条件进行稳定系统动力计算。射击冲击力矩具有时间短,峰值高的特点,可看作为连续脉冲函数。将射击冲击力经傅里叶级数展开后为

由于射击冲击力的作用机理跟具体结构有关,涉及因素多。故,火炮俯仰轴所受的射击冲击力矩Mps简化处理为

式中:zps为俯仰射击力臂。将火炮俯仰部分的射击冲击力转换至炮塔回转体坐标系中,可得方向轴射击冲击力矩

式中:yhs为俯仰射击力臂。
2.5 摩擦力矩
射击线稳定系统的各个轴系必须产生运动以补偿载体的姿态变化,在运动过程中不可避免低受到轴系、动摩擦件等产生摩擦力矩的影响,主要在低速或零速段表现为死区、爬行等控制不平稳现象。炮塔与车体采用方向座圈连接,座圈半径为Rhd,座圈中滚动轴承滑动摩擦系数为μhf,座圈密封圈的粘性摩擦系数为Khf.将炮塔的质量投影到炮塔回转体坐标系的Ohzh轴上,可得炮塔回转体的平均滑动摩擦力矩

方向轴平均滑动摩擦力矩结合Tustin 摩擦力矩模型[12]可得
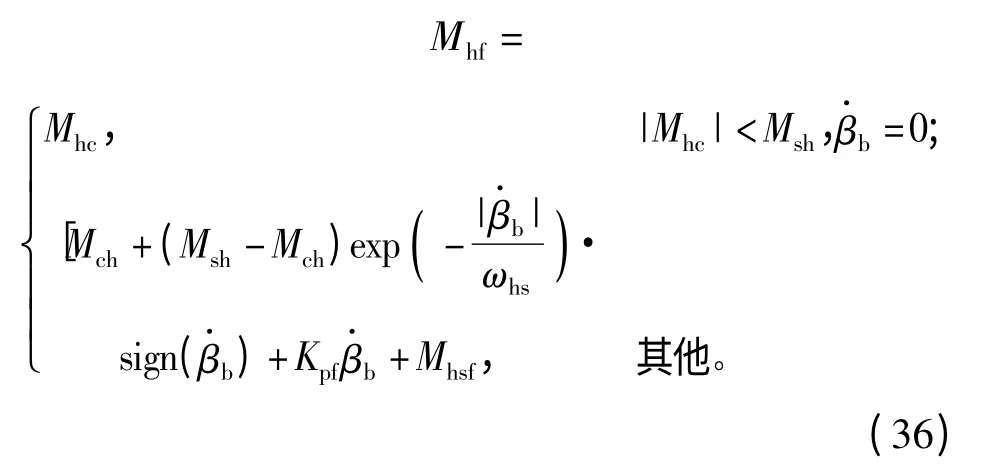
式中:Mhc为方向控制力矩;Msh、Mch分别为炮塔回转轴的静阻力矩、库伦摩擦力矩,且Msh>Mch;ωhs为方向轴stribeck 速度常值。
火炮俯仰部分通过摇架与炮塔的“丫”型体上的2 个座圈相接,如图1 所示。座圈半径为Rpd,座圈中滚动轴承滑动摩擦系数为μpf,座圈密封圈的粘性摩擦系数为Kpf.将火炮俯仰部分的质量投影到火炮俯仰部分坐标系Opzp轴上,同理可得俯仰轴的摩擦力矩和控制力矩[12]分别为

式中:Mpc为俯仰控制力矩;Msp、Mcp分别为俯仰轴的静阻力矩、库伦摩擦力矩,且Msp>Mcp;ωps为俯仰轴stribeck 速度常值。
3 仿真计算
本文在文献[9]的基础上建立了更为完善的射击诸元坐标变换模型,在给定大地坐标系下的射角εn及其角速度、角加速度方向角βn、角速度和角加速度的瞄准参数、车体运动参数的已知条件下,不仅算出车体坐标下的瞄准角度εb、βb,还算出动力学仿真计算所必需瞄准参数。然后根据射击线稳定系统动力学模型,按最大功率原则,算出武器线稳定系统的相关力矩。εn取值范围为[0° 10° … 70°],同时给定最大高低瞄准速度=70°/s;最大高低瞄准加速度=0°.每隔10°计算一次力矩,同时βn的区间在0° ~360°连续变化,同时给定最大方向瞄准速度80°/s,最大方向瞄准加速度=0°.在计算最大功率时,最大瞄准速度和最大瞄准加速度不会同时出现,按此方法计算有足够余量。按一种重型车辆并考虑射击冲击力矩扰动后的车体运动数据进行仿真计算,它们分别为:车体方向角车体俯仰角车体横滚角γ =
射击线稳定系统机械参数:Jpx=400 kg·m2,Jpy=850 kg·m2,Jpz=300 kg·m2;Jhx=4 000 kg·m2,Jhy=4 500 kg·m2,Jhz=5 500 kg·m2;mh=5 600 kg,mp=1 000 kg;xh=0.1 m,yh=0.1 m,xp=0.5 m,重力加速度gn=9.8 m/s2;Fps=20 000 N,为了观察长周期性影响,在2 s 时刻加入无限次连续射击冲击,zps=0.07 m,yhs=0.07 m,f0=15 Hz;Kfh=0.2,Kfp=0.2.由于方向轴和俯仰轴是按最大速度调转,那么摩擦力矩较之其他力矩可忽略。
炮塔回转轴和火炮俯仰轴在εn分别为0°和70°时承受的射击冲击力矩曲线如图5 所示。在2 s时刻加入了射击冲击力矩,其Mps最大值约1 590 N·m,频率为15 Hz.Mhs与Mps的大小受εn影响小。通过对比图5 和图11 可知,在εn=70°时,俯仰轴射击力矩Mps约大于Mpd的30%,在低射角下所占比例更多。根据(34)式方向轴射击力矩Mhs跟βb有关,βb对Mps进行调制,形式复杂,所受射击冲击力幅值等同于Mps.
车体停止间,平衡机设计可满足高低不平衡力矩|Mpe| <100 N·m.而车体行进间由引起|M'pe|最大达到约5 400 N·m,|Mpe|可到达400 N·m 以上。方向轴的不平衡力矩曲线如图6 所示。Mhe受εn的影响较小,受βn的影响,呈余弦变化,与βn同周期,幅值为(1 170 ±50)N·m.
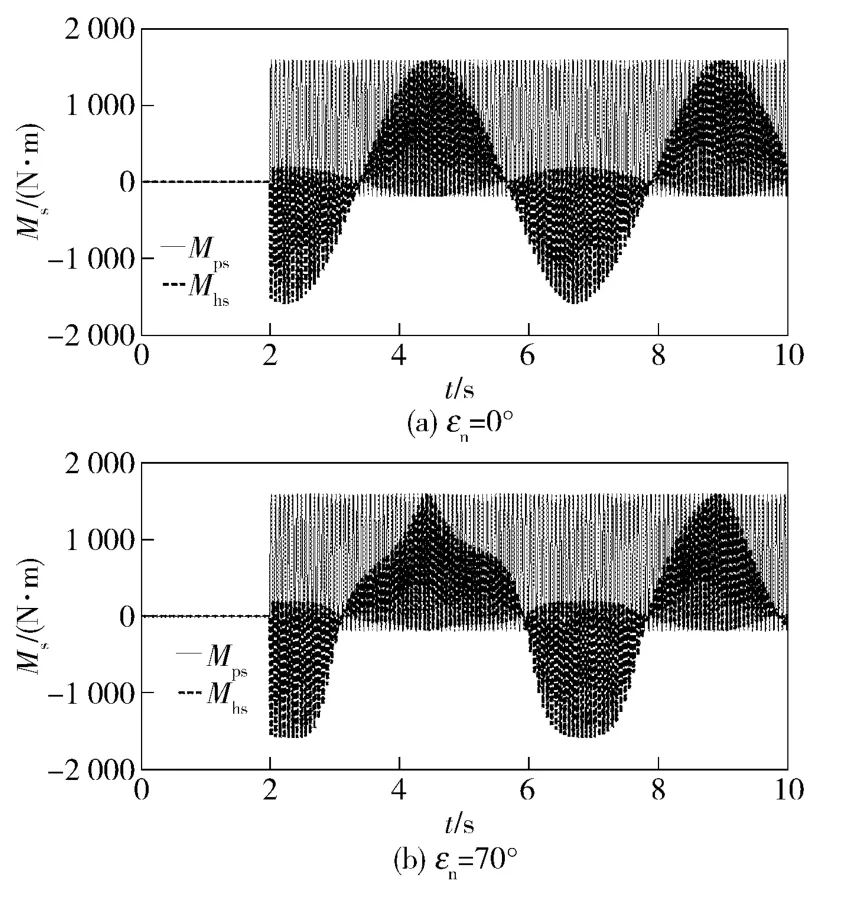
图5 炮塔回转体和火炮俯仰部分射击冲击力矩曲线Fig.5 Shooting impact torque curves of turret revolution body and gun elevation part
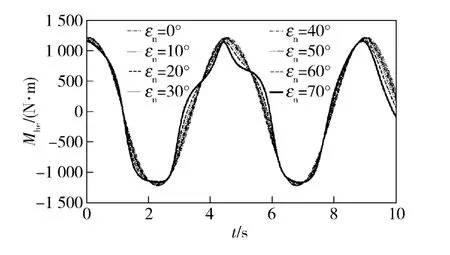
图6 方向轴的不平衡力矩曲线Fig.6 Imbalance torque curves of azimuth axis
炮塔回转体对火炮俯仰部分的交叉耦合力矩曲线如图7 所示,车体对火炮俯仰部分的交叉耦合力矩曲线如图8 所示,火炮俯仰部分对炮塔回转体的交叉耦合力矩曲线如图9 所示,车体对炮塔回转体的交叉耦合力矩曲线图10 所示。运动交叉耦合力矩随着εn增大而增大。车体运动对炮塔回转体和火炮俯仰部分的交叉耦合力矩大于炮塔回转体和火炮俯仰部分相互之间产生的交叉耦合力矩,且车体运动对炮塔回转体的交叉耦合力矩远大于炮塔回转体部分所受的不平衡力矩和射击冲击力矩。
俯仰轴和方向轴的总干扰力矩曲线分别如图11和图12 所示。经过干扰力矩的叠加,俯仰轴的总干扰力矩随着εn增大而增大,当εn=0°时,俯仰轴总干扰力矩最大值Mpdmax≈2 983 N·m;当εn=70°时,Mpdmax≈5 149 N·m.图12 中,方向轴总干扰力矩几乎重叠,受εn影响小,方向轴总干扰力矩最大值Mpdmax≈6 935 N·m.
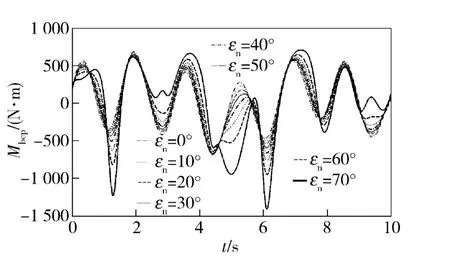
图8 车体对火炮俯仰部分的交叉耦合力矩曲线Fig.8 Cross coupling torque curves of vehicle body to elevation part
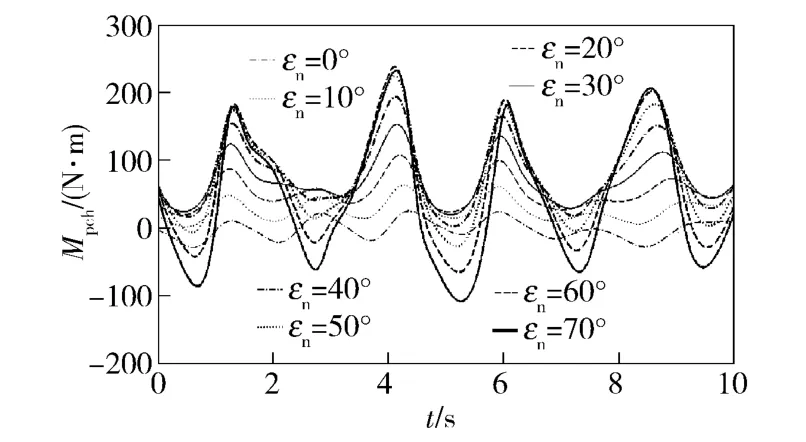
图9 火炮俯仰部分对炮塔回转体的交叉耦合力矩曲线Fig.9 Cross coupling torque curves of elevation part to azimuth turret
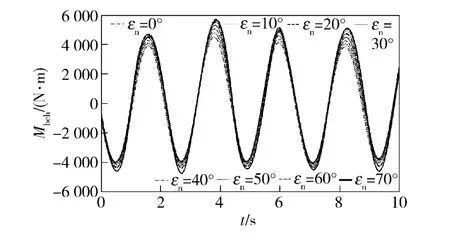
图10 车体对炮塔回转体的交叉耦合力矩曲线Fig.10 Cross coupling torque curves of vehicle body to turret revolution body
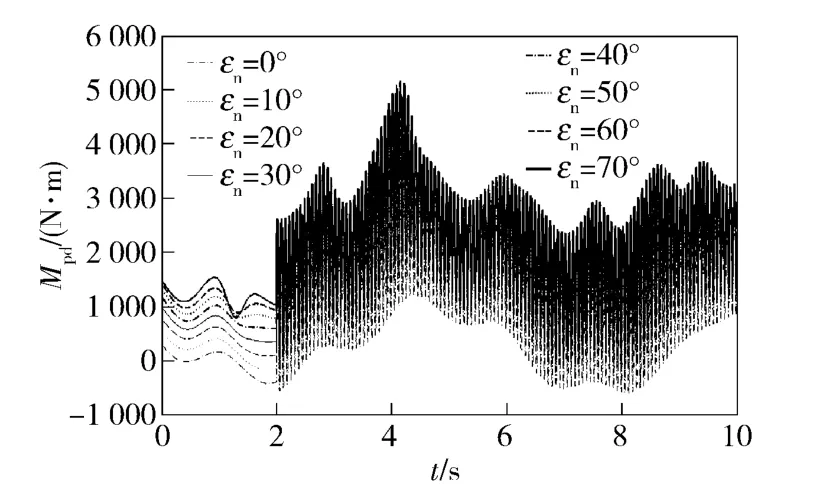
图11 俯仰轴总干扰力矩曲线Fig.11 Total disturbance torque curves of elevation axis
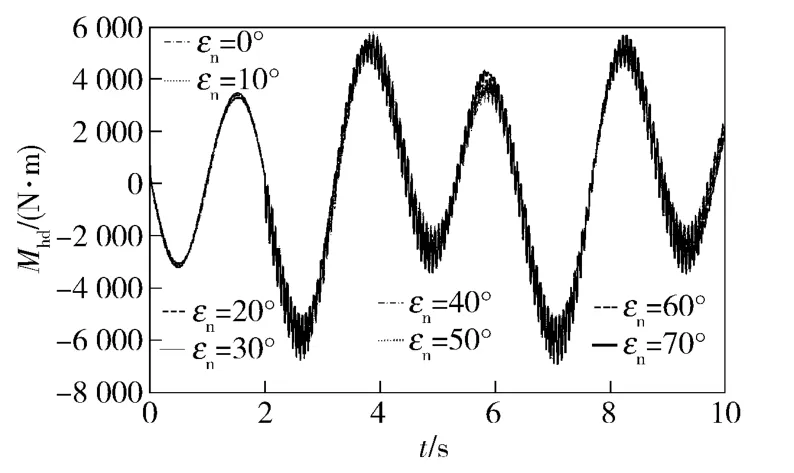
图12 方向轴总干扰力矩曲线Fig.12 Total disturbance torque curves of azimuth axis
火炮俯仰轴和炮塔方向轴的控制力矩曲线分别如图13 和图14 所示。俯仰轴控制力矩受εn影响较小,曲线几乎相互重叠。当εn=0°时,俯仰轴控制力矩最大值Mpcmax≈6 478 N·m,方向轴控制力矩随着εn增大而迅速增大;当εn=70° 时,方向轴控制力矩最大值Mhcmax≈3.25 ×105N·m.对比图11和图13,俯仰轴干扰力矩占俯仰控制力矩最大达到80%.对比图12 和图14,方向轴干扰力矩在εn≤20°时约占方向控制力矩的30%以上。随εn的变换规律可参考文献[10].当εn>20°时,由于迅速增大,此时惯性力矩也迅速增大,惯性力矩是方向轴控制力矩的主要组成部分。
综合仿真计算结果,得到如下结论:
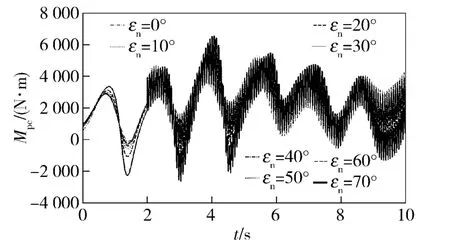
图13 俯仰轴控制力矩曲线Fig.13 Control torque curves of elevation axis
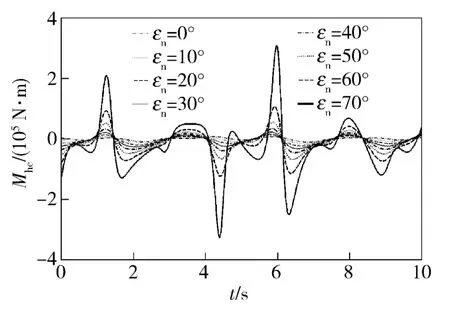
图14 方向轴控制力矩曲线Fig.14 Control torque curves of azimuth axis
1)车体运动对炮塔回转体的交叉耦合力矩是炮塔回转体受到的主要干扰力矩,且受射角影响小;方向轴控制力矩和俯仰轴干扰力矩随着射角增大而增大,而方向轴控制力矩在方向惯性力矩的影响下,增加的速度更快。
2)俯仰轴干扰力矩和低射角下的方向轴干扰力矩是相应轴控制力矩中较大的组成部分。
4 结论
本文依据动量矩定理及矢量叠加原理,系统地建立了SPAA 射击线稳定控制平台牛顿-欧拉动力学模型,并结合车体坐标系下的射击诸元参数,对射击线稳定控制平台进行了动力学仿真计算和分析。其结果表明:在一定的火炮结构空间布置和供电能源限制条件下,火炮高低向稳定具有完全可实现性;炮塔回转部分控制力矩随射角增大而成倍增大,方位向稳定只有在特定条件下才具有可实现性。这对武器系统总体设计、研究射击线稳定适用条件,确定射击线稳定系统功率,尤其对设计和优化稳定系统控制器具有重要意义。以后将继续采用上述方法并结合伺服电机模型对射击线稳定系统控制模型进行深入研究。
References)
[1]郭治.现代火控理论[M].北京:国防工业出版社,1996:116 -117.GUO Zhi.Modern fire control theory[M].Beijing:National Defense Industry Press,1996:116 -117.(in Chinese)
[2]Kennedy P J,Kennedy R L.Direct versus indirect line of sight(LOS)stabilization[J].IEEE Transactions on Control System Technology,2003,11(1):3 -15.
[3]Yang P,Li Q.Realization of TV guidance gyro stabilized platform and research of control algorithm[C]∥2nd International Conference on Space Information Technology.US:SPIE,2007,6795:431 -436.
[4]Hilkert J M.Inertially stabilized platform technology concepts and principles[J].IEEE Control Systems Magazine,2008,28(2):26-46.
[5]周瑞青,吕善为,刘新华.捷联式天线稳定平台动力学建模与仿真分析[J].北京航空航天大学学报,2005,31(9):953 -957.ZHOU Rui-qing,LV Shan-wei,LIU Xin-hua,Dynamics modeling and simulation analyzing for strapdown antenna stable platrom[J].Journal of Beijing University of Aeronautics and Astronautics,2005,31(9):953 -957.(in Chinese)
[6]张延顺,朱如意,房建成.航空遥感用惯性稳定平台动力学耦合分析[J].中国惯性技术学报,2011,19(5):505 -509.ZHANG Yan-shun,ZHU Ru-yi,FANG Jian-cheng.Analysis on dynamics coupling of inertial stabilized platform for aerial remote sensing[J].Journal of Chinese Inertial Technology,2011,19(5):505 -509.(in Chinese)
[7]满益明,江燕华,胡玉文,等.车载捷联式三轴稳定控制平台动力学学建模与分析[J].哈尔滨工业大学学报,2011,43(9):122 -127.MAN Yi-ming,JIANG Yan-hua,HU Yu-wen,et al.Dynamic model and analysis for vehicle mounted strapdown 3-axis stable platform[J].Journal of Harbin Institute of Technology,2011,43(9):122 -127.(in Chinese)
[8]周启煌,常天庆,邱晓波.战车火控系统与指控系统[M].北京:国防工业出版社,2003:6 -13.ZHOU Qi-huang,CHANG Tian-qing,QIU Xiao-bo.Firecontrol system and command control system of combat vehicle[M].Beijing:National Defense Industry Press,2003:6 -13.(in Chinese)
[9]毛征,雷加印,吕春花,等.自行高炮射击线稳定性分析[J].火炮发射与控制学报,2011,(3):92 -96.MAO Zhen,LEI Jia-yin,LV Chun-hua,et al.Analysis on firing line stability of SPAA gun[J].Journal of Gun Launch & Control,2011,(3):92 -96.(in Chinese)
[10]尤荣贤,金安石.自行高炮射击线稳定的智能控制研究[J].南京理工大学学报,1993,72(6):18 -21;YOU Rong-xian,JIN An-shi.Intelligent control research on firing line stability of SPAA gun[J].Journal of Nanjing University of Science and Technology,1993,72(6):18 -21.(in Chinese)
[11]张双运,苏娟丽,王波,等.轮式自行高炮射击线补偿的一种途径[J].火炮发射与控制学报,2009,(4):1 -3.ZHANG Shuang-yun,SU Juan-li,WANG Bo,et al.Fire line compensation method of wheeled self-propelled AA gun system[J].Journal of Gun Launch & Control,2009,(4):1 -3.(in Chinese)
[12]Márton L,Lantos B.Modeling,identification,and compensation of stick-slip friction[J].IEEE Transitions on Industrial Electronics,2007,54(1):511 -521.
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
小哥白尼(军事科学)(2020年2期)2020-06-16
智能计算机与应用(2018年5期)2018-10-20
现代兵器(2017年9期)2017-09-28
现代兵器(2017年1期)2017-02-13
现代兵器(2016年10期)2016-10-26
专用汽车(2016年12期)2016-02-11
兵器装备工程学报(2015年7期)2015-12-30
山东工业技术(2014年20期)2014-10-21
计算机辅助工程(2012年5期)2012-11-21
