
电动车无刷直流电机控制系统的研究
2013-03-03 03:31王伟卢雄彭安涛
湖北汽车工业学院学报 2013年1期
王伟,卢雄,彭安涛
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
电动车无刷直流电机控制系统的研究
王伟,卢雄,彭安涛
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
设计了一种以LPC1769单片机为核心的电动车无刷直流电机控制系统,给出了主要硬件电路和软件模块的设计过程。实验测试表明,该系统输出功率大,调速范围宽,具有良好的启动和运行特性,功能完善,保护措施到位,具有较高的应用和推广价值。
电动车;无刷直流电机;控制系统;逆变器
无刷直流电机(BLDCM)是随着新型电力电子器件和永磁材料的发展而成熟起来的一种新型电机,它属于同步电机的范畴,既具有交流异步电机运行可靠的优点,又具有传统有刷直流电机优越的调速性能,因此具有广泛的应用前景[1-2]。电动车用电机已由早期的传统直流电机和交流异步电机发展到无刷直流电机阶段[3],BLDCM控制系统一般有两种形式:复杂的纯模拟器件构成的控制器和以微控制器为核心的数字式控制器,早期的电动车以及当前少量的电动观光车采用纯模拟器件构成的无刷电机控制器,而当前的数字式控制器使电动车控制器设计更灵活,功能更丰富,因而得到广泛应用[4-5]。
本系统采用时代超群80BL145-440无刷直流电机,额定参数为电压48V,额定功率550W,额定转 速 4500 r·min-1。 采 用 恩 智 浦LPCXpressoLPC1769单片机为核心,自主设计了无刷直流电机的软硬件控制的完整系统。测试结果表明,该系统工作稳定,满足了电机的各项运行指标。
1 系统结构与功能
BLDCM是一种典型的机电一体化产品,它是由电机本体、位置检测器、逆变器和控制器组成的自同步电动机系统[6-7]。位置检测器检测转子磁极的位置信号,控制器对转子位置信号进行逻辑处理并产生相应的开关信号,开关信号以一定的顺序触发逆变电路中的功率器件。系统结构如图1所示。

电动车用无刷电机智能控制系统主要包括:由逆变主电路、逆变功率开关驱动电路构成的输出驱动电路;以LPCXpressoLPC1769单片机为核心的主控模块;调速把、刹车把、限速、定速巡航及液晶显示构成的人机接口电路;相电流、母线电压采集电路;转子位置检测电路。
为使电动机在起动阶段能维持最大允许起动力矩,充分利用电动机的过载能力获得最快起动效果,并且系统可在稳态条件下实现转速无静差的理想效果,采用了是转速电流双闭环控制策略。系统控制结构如图2所示。

电机正常运行时,控制器根据转子位置信号计算出当前转速,与设定的转速信号进行PI运算[8],得到电流的给定电压参考值,电流反馈信号经 A/D接口送入控制器,经转换后得到电流的反馈值和参考值进行PI运算,得到电流调节器的输出调节占空比,控制功率管的开/关状态,从而实现对电机的转速和电流的双闭环控制。
2 系统硬件设计
如图1所示,无刷直流电机控制系统的硬件结构是以单片机为核心,在单片机内完成所有的数据采集、处理和控制功能。外围电路主要有功率驱动电路、霍尔位置信号处理电路、电流采样及过流保护电路、电池电压采集电路、人机接口电路等。下面将对主要的硬件电路设计进行说明。
2.1 功率驱动电路
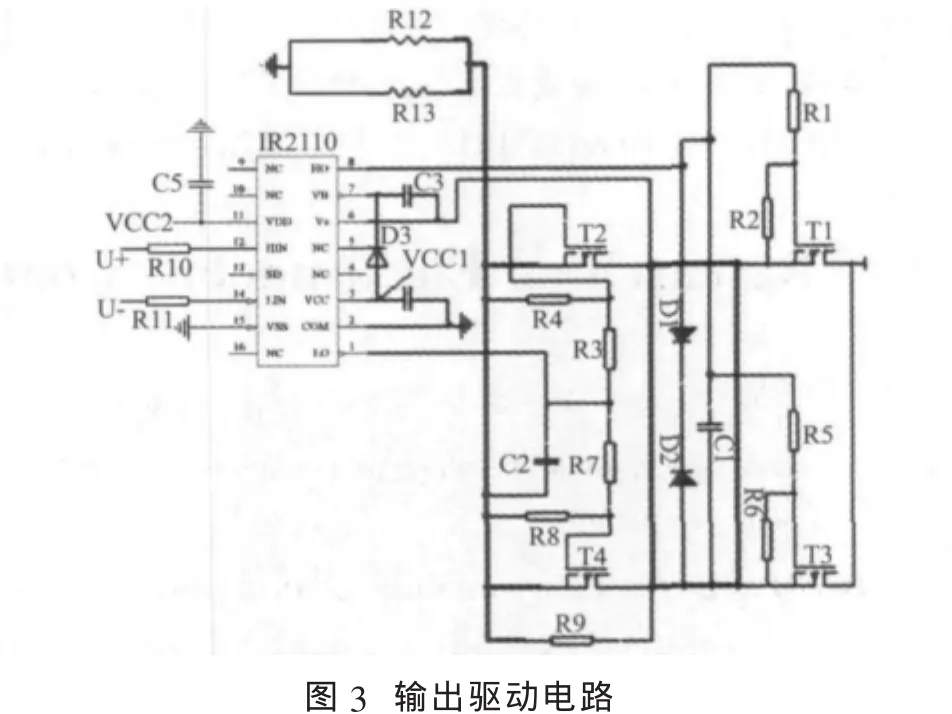
为了满足大功率无刷电机驱动的需求,系统采用三相桥式逆变电路,采用12只MOS管构成,其中每个桥臂4个MOS管,上下桥臂各2个。上下桥臂的中间节点作为电机的驱动信号输出端,分别接于电机的三相绕组,三相绕组呈星型联接。
以一相为例,如图3所示,当IR2110的HO输出为低,LO输出为高,上管截止下管导通时,输出端与地相连,输出端相当于地;当IR2110的输出HO为高,LO输出为低,上管导通下管截止时,输出端与电源相连,输出端相当于电池电压48V。为避免上下桥臂短路烧毁,在任何时刻禁止HO和LO同时为高。
2.2 霍尔信号处理电路
霍尔传感器输出的三路位置信号通常受到电机运行过程中的噪声干扰,一般都含有很多毛刺,采用图4所示的阻容滤波电路。同时因为霍尔传感器是开漏输出,所以必须进行上拉。

2.3 电流采样及过流保护电路
本系统采用直流母线电流采样方式,电机回路电流信号经采样电阻转成电压信号送入运算放大器LM358,由LM358构成一个电压比较器,把检测的电流信号与阈值电压比较,得到过流输出信号,过流时比较器翻转触发单片机中断,及时关断MOS管。同时由LM358构成的比例放大电路,将将电流信号放大转换成的电压信号,分别代表瞬时电流和平均电流信号送入单片机采集处理,如图5所示。

2.4 人机接口电路
人机接口电路有设定转速的转速把电压的采集电路,刹车制动电路,限速设置电路,定速巡航设置电路,液晶显示电路等。
设计了液晶仪表显示器(图6),在显示面板的左侧为电池电压显示,右侧为电机运行电流显示,中央为电机转速显示,采用液晶模拟显示的方法,更加直观地获得电机转速。

3 系统软件设计
无刷直流电机控制系统的软件设计采用模块化思想,将整个控制系统的软件划分为2个部分,即主程序和主中断程序,以利于软件设计、调试、修改和维护。系统实现电子换相、柔性刹车、无级调速、限速、定速巡航和显示等功能性要求,以及过流保护、电池欠压保护等安全性要求。
软件系统中,设计了速度电流双环电机驱动控制程序、转子位置检测程序、电流采样程序、转速估算程序、PWM发生程序、限流驱动程序、过流欠压保护程序等中断服务子程序和人机界面程序。
3.1 主程序
主程序负责建立整个程序的一个运行框架,完成控制器初始化、控制器运行环境的定义等任务。系统主程序流程图如图7所示。后台循环程序只需实现2个功能:在没有主中断请求时,后台循环程序不断执行LCD显示程序和开关处理程序,实现人机界面功能;当有主中断请求的时候,跳转到主中断服务子程序。
3.2 主中断程序
主中断程序是系统软件的核心部分,从功能上分为:系统故障检测及故障处理程序;无刷电机驱动控制程序。在进入主中断服务程序时,首先进行系统故障检测,当发生故障时,程序跳入故障处理程序,系统停机。如果没有发生故障,系统正常,则进入电动驱动程序,控制电机运转。
1)系统故障检测及故障处理程序 本系统设定了母线电压过压/欠压故障、过电流故障的检测。当发生故障的时候,调用故障处理程序,故障处理程序将PWM信号封锁。系统故障检测及故障处理程序流程图如图8所示。


2)电机驱动控制程序 电机驱动程序根据功能主要分为速度调节模块、电流调节模块、PWM发生模块、电流采样模块、转子位置检测模块、转速估算模块。电机驱动控制程序流程如图9所示。由于在电机起停、负载突变或者快速的加减速过程中,无论速度环还是电流环,其设定值与反馈值之间都会出现较大的误差,微分项对误差和噪声非常敏感,因此对速度和电流的调节均采用PI控制策略。
转速环包含位置检测模块、转速估算模块、速度调节4个模块。速度估算模块根据位置检测模块的中断标志信号、位置信息和软件时间估算出当前电机转速,将反馈速度送入速度调节器与给定速度相比较并进行PI调节,实现速度环的调节作用。速度调节器的输出为参考电流。
电流环包含电流采样模块、电流调节器、PWM发生模块3个模块。电流采样模块根据当前转子位置状态采样相应相电流,并求出当前定子电流幅值,将反馈电流送入电流调节器与参考电流相比较并进行PI调节,实现电流环的调节作用。电流调节器的输出为PWM波的占空比。PWM发生模块根据占空比以及当前转子位置信息确定PWM波的输出波形。
3.3 中断服务子程序
中断服务程序主要完成转子位置检测、转速估算、PWM信号发生、系统保护、人机接口等功能。限于篇幅,本文只对转子位置检测和转速估算程序进行设计分析,其流程图如图10~11所示。

转子位置检测程序对驱动程序非常重要,转子位置信息为转速估算程序、电流采样程序、PWM导通关断逻辑提供重要信息。要实现转速闭环,必须提供电机转速信息,本系统根据位置传感器信号利用软件方法估算电机转速。电机转速估算程序在每个霍尔位置信号的跳变边沿进行,以I/O口捕捉中断标志位有效与否判断是否执行电机转速估算子程序。
4 系统测试
将上述软硬件进行联调测试,系统实物如图12所示。首先分别检验控制系统的电机驱动模块、霍尔位置信号检测模块、PWM发生模块、转速估算模块、过流保护模块、电池电压采集模块、电机信息显示模块、单片机和系统板供电模块以及刹车、巡航、限速、调速把模块。
图13是用双通道示波器测量的重要信号波形,其中图13a是相邻两项霍尔信号,任一霍尔信号有限电平均为180°,且互差60°;图13 b是单片机输出的某一相的驱动信号,即逆变桥的驱动信号,其中一通道显示的采用电平控制信号,二通道显示的是采用PWM控制信号;图13c相邻的电机两相电压波形,在一相绕组施加电压时,另一项继续存在反电动势产生的衰减电压信号。将各个调试好的模块联合构成本系统,由于测试条件有限,在系统双闭环控制策略的调试过程中,给电机人工施加负载的条件下,先调节速度外环的PI参数,再调节电流内环的PI参数。整个调节过程中,一直通过万用表监测母线电压和相电流,使电机能够输出额定功率,并具有足够的负载能力。

经过反复测试,各项功能模块均工作正常,电机起动平稳、加速平滑,电机在额定4500 r·min-1范围内转速任意可调;人为增加电源电压到52 V以上和降低电源电压到42 V以下时,过压和欠压保护均得到实现;在运行过程中突加负载导致电机堵转3 s时,立即进行过流堵转保护;当转速把(实验中采用电位器模拟)设定转速保持8 s不变时,电机即进入巡航状态;通过示波器观测到的霍尔信号、PWM发生信号、电流采样等信号,信号均稳定且噪声很小,说明电路设计可靠,系统工作正常。
5 结束语
以LPCXpressoLPC1769单片机为控制核心的电动车用无刷直流电机智能控制系统,通过硬件的设计与制作、软件的设计与编写,完成了电动车无刷直流电机控制器的实验系统。并针对应用额定电压为48V,额定功率为550W的无刷直流电机进行安装调试,很好地完成无刷直流电机的调速、刹车、定速巡航、限速等功能性要求和过压/欠压保护、过流保护等安全性要求。实验结果表明,该系统体积小,重量轻,精度高,相比传统模拟控制器具有更大的灵活性和可靠性,容易实现附加功能和全数字化控制。
[1]王贵明,王金懿.电动汽车新产业链的理想运行模式探讨[J].汽车工业研究,2011(2):10-16.
[2]王凤琥,孙跃东.电动汽车传动系统方案研究[J].制造业自动化,2012(2):75-78.
[3]陈清泉.现代电动车、电机驱动及电力电子技术[M].北京:机械工业出版社,2006.
[4]余浩赞,王辉,黄守道.永磁同步电机控制系统全数字化实现[J].电力电子技术,2009(1):25-27.
[5]张洁.简论纯电动汽车的驱动电机及其控制系统[J].国内外机电一体化技术,2012(3):40-41.
[6]卫国爱,全书海,朱忠尼.电动汽车驱动用无刷直流电动机的控制与仿真[J].电机与控制应用,2009,36(1): 16-19.
[7]郭庆鼎,赵希梅.直流无刷电动机原理与技术应用[M].北京:中国电力出版社,2008.
[8]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
(指导老师:黄海波)
Research on Electromobile Control System of Brushless DC Motor
Wang Wei,Lu Xiong,Peng Antao
(School of Electrical&Information Engineering,Hubei University of Automotive Technology,Shiyan 442002,China)
An electromobile control system of brushless DC motor was designed based on LPC1769 microcontroller,the design process of the main hardware circuits and software modules were given.The experimental testing shows that this system has the characteristics of large output power,wide speed range,good starting and running performance,perfect functions,protection in place,and better application and promotion value.
electromobile;brushless DC Motor;control system;inverter
TP301;TM33
A
1008-5483(2013)01-0071-05
10.3969/j.issn.1008-5483.2013.01.019
2012-12-12
湖北汽车工业学院大学生创新性实验项目(SJ201219)
猜你喜欢
大电机技术(2022年5期)2022-11-17
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
人大建设(2019年12期)2019-05-21
瞭望东方周刊(2017年42期)2017-12-05
电子制作(2017年1期)2017-05-17
环球时报(2017-03-30)2017-03-30
中国卫生(2015年3期)2015-11-19
淮南师范学院学报(2015年3期)2015-03-22
