直升机光纤陀螺IMU抗振设计及实时滤波方法
2013-03-19 08:23房建成
北京航空航天大学学报 2013年4期
任 剡 房建成
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
许 端
(北京航空工程技术研究中心,北京 100076)
惯性测量单元(IMU,Inertial Measurement U-nit)是直升机航姿测量系统的核心部件,利用3轴陀螺、加速度计敏感的角速度和加速度数据,计算载体当前的位置和姿态等信息[1],其中陀螺的性能主要决定了IMU的性能.光纤陀螺是一种基于Sagnac效应的角速度传感器,具有结构简单、启动快、体积质量小和性价比高等优点,是直升机IMU理想角速度传感器.
单轴光纤陀螺受结构、光纤绕环以及封装限制,当载体振动频率较高、振幅较大时,会产生零偏漂移和非线性、非高斯随机噪声[2],并导致FOG(Fiber Optic Gyroscope)捷联IMU非互易性解算误差,如何抑制光纤陀螺及其惯导系统的振动误差是直升机航姿系统重要问题.目前,国内外研究机构和学者针对光纤陀螺及系统的振动误差,提出了各种抑制措施[3],如加装减振装置[4];对光纤陀螺改进设计[5-7],提高抗振性能和环境适应性;采用有效的滤波方法降低振动引起的陀螺噪声和漂移,消除高于载体姿态运动频带宽度的噪声,提高姿态计算精度[8].但目前采用任何单一措施都不能完全解决光纤陀螺、IMU的测量误差和噪声问题.
针对直升机工作环境及小型FOG IMU振动特性,本文提出一种机械减振优化设计与高性能数据滤波相结合的组合抗振方法,建立减振系统数学模型,通过优化设计实现线、角运动通道解耦,从物理上屏蔽高频有害干扰振动;设计实时、低时延数据滤波方法,抑制机械减振系统谐振频点的振动干扰和信号噪声,减小振动噪声引起捷联IMU非互易性解算误差,最终保证FOG捷联IMU工作稳定性和精度,为研制高性能直升机高性能航姿系统奠定基础.
1 FOG IMU减振系统优化设计
从直升机航姿系统总体要求出发,为了准确测量载体位置和姿态,克服振动力学环境的限制,要求FOG IMU结构体谐振频率必须高于载体振动截止频率[8],同时还必须满足对线、角振动冲击的隔离要求.通过减振装置屏蔽外界阵风、湍流以及发动机等高频振动冲击引起的惯性器件零偏漂移、非线性与非高斯噪声.为了保证FOG IMU在线、角振动环境下的精度,应确保各自由度之间的振动相互解耦,并希望6个自由度的固有频率相接近.基于减振装置的FOG IMU线、角动力学模型可表示为

式中,m为IMU质量;a,Ω为IMU外界输入线加速度和角速率矢量,cos(ωbt);g为重力加速度矢量;Δ为IMU质心相对外部载体线位移矢量;C,K为IMU减振装置线阻尼系数和线弹性刚度;I为IMU转动惯量矢量;θ为IMU相对外部载体扭转角矢量;D,T为IMU减振装置扭转阻尼系数和抗扭弹性刚度;M0为加速度引起的扭转力矩常值项,M0=m R(g+a),R为IMU质心到减振装置中心的距离,FOG IMU 3轴线运动动力学方程为

式中,cki,kki分别为第k个减振器沿i轴向阻尼系数和弹性刚度;xk,yk,zk分别为第k个减振器相对减振装置几何中心的距离;n为减振器数量.根据式(2),FOG IMU 3轴角运动动力学方程可表示为


式中,Ix,Iy,Iz为 IMU 绕 x,y,z轴的转动惯量;Ixy,Iyz,Izx为 IMU 对 x,y,z轴的惯性积.各自由度之间相互耦合,只有设计IMU质心和转动惯量主轴坐标系原点重合,并以转动惯量主轴作为参考坐标系,IMU 对 x,y,z轴的惯性积为 0,Ixy=Iyz=Ixz=0,即消除了各轴向转动惯量的耦合.沿着参考坐标系各轴成组对称安装同一规格减振器,并设计该减振器沿3轴向具有相同减振特性,即kkj=kj=k;ckj=cj=c;xk=x;yk=y;zk=z,对称力和力矩积分为0:

因此消除各自由度间弹性力和力矩耦合;同一规格减振器kkj/ckj为定值,消除各自由度间阻尼力和力矩耦合,即

由于FOG IMU质心和参考坐标系原点重合,可得

在外部线、角运动的激励下,FOG IMU 6自由度动力学方程简化为

式中,Ci为减振装置沿i轴向阻尼系数,Ci=nc;Ki为减振装置沿i轴向弹性刚度,Ki=nk;Di为减振器沿i轴扭转阻尼系数,为减振装置沿i轴向扭转弹性刚度
减振装置抑制谐振频率点以上外界高频干扰振动传递到FOG IMU,减小高频振动、冲击对光纤陀螺和石英加速度计的不利影响,载体外界线振动引起IMU相对线位移可表示为


式中

式中,ω0j为固有角振动频率;为角运动振动频率.从式(12)和式(13)可知,为了保证FOG IMU在线、角振动环境下的精度,应确保各自由度之间的振动相互解耦,减振装置从物理角度避免了外界高频振动传递到FOG IMU,因此消除了高频干扰振动引起的零偏漂移和非线性、非高斯随机噪声.
2 近似线性相位IIR数字滤波方法
尽管减振装置可以消除外界高频振动对FOG IMU的影响,但根据质量-阻尼-刚度系统特性,在减振装置谐振频率点附近将产生有害的“共振”现象;通过增大减振装置阻尼系数可减小其影响,但对于优化直升机FOG IMU性能而言,该影响却不可忽视;另外,载体的中低频振动也会引起FOG IMU随机噪声和非互易性解算误差,因此需要采用滤波技术进一步提高系统的振动环境下工作稳定性和精度.要求该滤波器运算量小、可实现实时解算,同时要求具有时间延迟小的优点[9].根据系统实时、小时延的需求,本文提出在减振装置优化基础上的近似线性相位IIR(Infinite Impulse Response)低通滤波方法.
设定一个IIR滤波器,利用最小二乘估计使其在优化跟踪所期望频率特性的线性相位FIR(Finite Impulse Response)滤波器的单位冲激响应[10].设滤波器的激励信号为x(k);FIR滤波器输出为 yf(k);其参数为 h0,h1,…,hN-1;IIR 滤波器的输出为 y(k);其参数为 a1,a2,…,an,b0,b1,…,bn,则有
设计N-1阶线性相位FIR滤波器传递函数为

n阶IIR滤波器的传递函数表示为

以IIR滤波器参数作为状态估计变量X=[a1,a2,…,an,b0,b1,…,bn]T;以其输入输出组成量测矩阵 H=[-y(k-1),…,-y(k-n),x(k),…,x(k-n)],建立最小二乘估计方程为

则最小二乘递推算法如下:

式中,P(k)为系统估计量的协方差矩阵;r(k)为遗忘因子,为兼顾最小二乘收敛速度和灵敏度取0.980 < r(k)<0.998.
3 减振装置及数字滤波器设计
IMU由3个石英挠性加速度计、3个光纤陀螺组成.综合考虑成本、体积和精度等因素,加速度计和固态角速度陀螺采用成熟国产GJ-27石英挠性加速度计和11-FA2型光纤陀螺,其中GJ-27石英挠性加速度计精度优于1mg;11-FA2型光纤陀螺精度优于3(°)/h;这两种惯性原件均为高可靠性固态元件,平均无故障工作时间为30×105h,具有价格便宜、可靠性高及较高精度等特点.
3.1 基于减振装置FOG IMU结构设计
通过优化3个加速度计的安装位置和方位,减小了加速度计测量点相对减振装置几何中心的距离,设计3个光纤陀螺和加速度计安装面的平面度和正交度,减小系统安装误差Eij;在一定尺寸、重量条件下,增加IMU转动惯量,可有效提高系统抗角振动性能,减小陀螺抖动引起的尺寸效应、圆锥漂移等误差[11-12].
在IMU结构减振装置和方式方面保证减振器的机械强度、减振效率和位移等符合系统的抗振动冲击要求,根据上文中的优化设计准则,FOG IMU采用两侧对称八点相同减振器与外部载体固联,提高各自由度间振动去耦效应,并使各固有频率相互接近,获得较窄的频率分布,避免载机振动和冲击引起IMU共振,从而影响到系统的测量精度.
3.2 近似线性相位IIR滤波器设计
以设计11阶IIR低通滤波器为例,按表1中FIR滤波器指标参数,设计逼近过程需要的线性相位FIR低通滤波器Hf(ejω)

表1 FIR低通滤波器设计指标
在IIR低通滤波器线性相位时域逼近过程中,以高斯白噪声为激励信号,通过最小二乘参数估计算法式(19)估计IIR滤波器参数,最小二乘参数估计初值为0.表2为最终设计完成的11阶IIR滤波器性能统计,图1为应用IIR滤波器后的效果对比图.可以看出线性相位IIR滤波器噪声抑制能力提高至50 dB,通带纹波降低至0.27 dB,且运算量与18阶FIR滤波器相当.

图1 IIR滤波器滤波效果对比

表2 最小二乘优化后11阶IIR滤波器性能
4 验证试验
为了验证FOG IMU机械减振与数据滤波相结合的振动抑制方法的有效性和实用性,将该方法应用于自主研制的FOG IMU,开展了地面车载验证实验.将系统原理样机与一台高精度惯导系统一起安装在一辆北京212吉普车进行跑车动态实验,高精度惯导系统为成熟航空产品,陀螺误差小于 0.01(°)/h,加速度计误差小于 50 μg,其惯性导航姿态误差小于0.03°.二者跑车横滚轴对比情况如图2所示,试验结果表明:利用本文提出的减振系统优化设计原则,减低了外部复杂振动环境引起的器件级和捷联算法非互易性误差,提高抗振性能和环境适应性;采用本文提出的小运算量、低时延近似线性相位IIR滤波器,可有效降低振动引起的陀螺噪声和漂移,消除高于载体姿态运动频带宽度的噪声,提高姿态计算精度.采用综合误差标定补偿后,FOG IMU横滚角误差小于1°,满足直升机导航信息与航向姿态参考系统对惯性测量单元的精度要求.
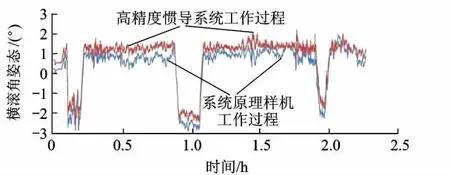
图2 FOG IMU与高精度惯导跑车实验横滚轴对比图
5 结论
本文提出的FOG IMU机械减振与数据滤波相结合的振动抑制方法,可实现线、角通道振动解耦,减小光纤陀螺捷联惯导误差.实验结果表明:采用该方法能有效地抑制外界干扰振动和系统噪声,保证FOG IMU工作稳定性和精度,为研制直升机高性能航姿系统奠定基础.
References)
[1] Wis M,Colomina I.Dynamic dependent IMU stochastic modeling for enhanced INS/GNSS navigation[C]//Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing(NAVITEC),2010 5th ESA Workshop.Shandong:IEEE,2010:1 -5
[2]陈文海,牟旭东,舒晓武,等.光纤陀螺的振动特性研究[J].光学仪器,2003,25(5):19 -23 Chen Wenhai,Mou Xudong,Shu Xiaowu,et al.Study on characteristic of vibration of fiber optical gyroscope[J].Optical Instruments,2003,25(5):19 - 23(in Chinese)
[3]舒建涛,李绪友,吴磊,等.高精度光纤陀螺振动误差抑制技术[J].红外与激光工程,2011,40(11):2201 -2206 Shu Jiantao,Li Xuyou,Wu Lei,et al.Vibration error restrain technology for high-precision fiber optic gyroscope[J].Infrared and Laser Engineering,2011,40(11):2201 - 2206(in Chinese)
[4] Aritaka O,Sbinji M,Ryuji U,et al.Development of fiber-optic gyroscope with environmental ruggedness[C]//Fiber Optic Gyros:15th Anniversary Conference 1991.Los Angeles:SPIE,1992(1585):82-88
[5]孟照魁,邵洪峰,徐宏杰,等.固胶对保偏光纤环的影响[J].北京航空航天大学学报,2006,32(8):958-961 Meng Zhaokui,Shao Hongfeng,Xu Hongjie,et al.Effect caused by coating adhesive on polarization-maintaining fiber coil[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(8):958 -961(in Chinese)
[6]宋凝芳,张春熹,李立京,等.数字闭环光纤陀螺振动误差分析[J].北京航空航天大学学报,2004,30(8):702 -704 Song Ningfang,Zhang Chunxi,Li Lijing,et al.Analysis of vibration error in digital closed-loop fiber optic gyroscope[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(8):702-704(in Chinese)
[7]易康,李廷志,吴文启.FLP滤波算法在光纤陀螺信号预处理中的应用[J].中国惯性技术学报,2005,13(5):58 -62 Yi Kang,Li Tingzhi,Wu Wenqi.Application of forward linear prediction filter in signal process of FOG[J].Journal of Chinese Inertial Technology,2005,13(5):58 -62(in Chinese)
[8]张志鑫,张大伟.捷联惯组减振系统角振动、线振动共振频率理论分析[J].中国惯性技术学报,2009,17(6):654 -657 Zhang Zhixin,Zhang Dawei.Theory analysis on resonance frequencies of linear vibration and torsional vibration of strapdown IMU damping system [J].Journal of Chinese Inertial Technology,2009,17(6):654 -657(in Chinese)
[9] Brandenstein H,Unbehauen R.Weighted least-squares approximation of FIR by IIR digital filters[J].IEEE Transaction Signal Processing,2001,49(4):558 -568
[10] Jiang A,Kwan H K.IIR digital filter design with new stability constraint based on argument principle[J].IEEE Transaction on Circuits and Systems,2009,56(3):583 -593
[11] Li JL,Fang JC,Du M.Error analysis and gyro-bias calibration of analytic coarse alignment for airborne POS[J].IEEE Transaction on Instrumentation and Measurement,2012,61(11):3058-3064
[12] Zhang L D,Lian JX,Wu M P,et al.Research on auto compensation technique of strap-down inertial navigation system[C]//International Asia Conference on Information in Control,Automation and Robotics.Bangkok:IEEE,2009:350 -353
猜你喜欢
空间电子技术(2021年4期)2021-11-10
导航与控制(2020年3期)2020-09-09
中国民航大学学报(2020年2期)2020-06-15
小学生学习指导(低年级)(2019年10期)2019-10-16
电子制作(2019年11期)2019-07-04
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
快乐语文(2018年36期)2018-03-12