克服磁场对高精度光纤陀螺寻北影响的研究
2013-05-15 01:04邵春江刘晴晴
航天控制 2013年3期
任 磊 邵春江 周 璐 刘晴晴
1.北京航天自动控制研究所,北京 100854 2.宇航智能控制技术国家级重点实验室,北京 100854
陀螺定向是惯性技术的一个重要研究应用方向,在民用和军事领域都有广泛应用。作为新一代惯性测量仪表,光纤陀螺在成本、精度、可靠性等方面的优势使其受到世界各国的普遍重视,目前,国外光纤陀螺的研究和应用已达到很高的水平。近几年,随着国内光纤陀螺技术的不断突破,基于光纤陀螺的高精度定向技术也成为国内研究和工程应用的热点。
光纤陀螺输出特性受温度[1]和磁场[2]影响较大,这也是限制国内高精度光纤陀螺工程应用的两大因素。通常,温度变化比较缓慢,主要引起陀螺逐次上电常值零位变化及长相关的陀螺漂移,对于寻北应用,可以通过连续旋转[3-4]或多位置采样[5-7]抑制其对寻北精度的影响。光纤陀螺对磁场比较敏感,文献[6-7]在分析地磁场影响多位置寻北误差机理的基础上提出2种解决方法:1) 预先标定光纤陀螺输出随方位的变化规律,然后据此补偿地磁的影响。该方法不但工作量大,而且复杂的环境磁场也使补偿精度不高;2)对光纤陀螺进行磁屏蔽设计,这是目前工程上降低光纤陀螺磁敏感性的主要方法[8]。根据文献[9]的研究结果,磁屏蔽不能完全隔离实际的磁场环境,屏蔽后陀螺的零偏和漂移仍具有较大的磁敏感度。因此,对于高精度的定向应用,采用磁屏蔽设计后仍会引起不可忽视的定向误差。本文从系统级应用角度出发,在不增加系统设计复杂度和硬件成本的条件下,提出一种能有效克服不同方位磁场变化影响寻北精度的方法。
1 光纤陀螺寻北一致性问题
陀螺定向精度包含2个方面[10,12]:1) 寻北的系统误差,即寻北结果与方位角真值的偏差;2) 寻北的稳定性,通常以某一确定位置多次寻北结果的标准差衡量[11]。对于系统误差,工程上通常根据多个方位多次测量的统计结果对寻北仪进行预先标定,将常值部分看作是仪器常数并按系统误差进行补偿[10,12]。该方法的应用前提是,在不同方位寻北的系统误差应尽可能一致。由于磁场在不同方位的强度不同,使得光纤陀螺在不同方位寻北的系统误差不一致,存在较大的波动,按仪器常数补偿后在某些方位会产生较大的寻北误差。
2 陀螺最佳测量位置分析
光纤陀螺定向以地球自转角速度的水平分量为基本的观测量,通过测量该分量在陀螺敏感轴上的投影获取载体相对真北的方位。陀螺在不同方位对角度变化的敏感程度不同,为了得到尽可能高的测量灵敏度进而提高系统寻北精度,需要对陀螺最佳测量位置进行分析。由于本文所提方法涉及二位置和四位置寻北方案,因此,这里重点讨论二位置和四位置寻北中陀螺最佳测量位置的选择。
2.1 二位置寻北最佳测量位置
(1)
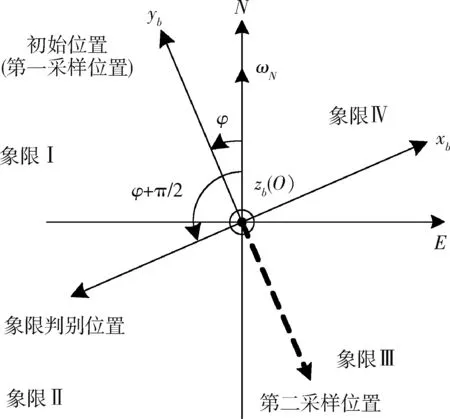
图1 二位置寻北原理示意图
由于反余弦函数的主值范围为[0,π],而方位角取值范围为[0,2π],根据式(1)不能确定方位角。因此,第2次采样后,控制转台顺时针转过90°进行象限判别,此时陀螺测量值为ω′,根据φ1和ω′可得到方位角
(2)
φ即为二位置寻北方位角测量值。由式(1)有
(3)
上式两边取微分得到
(4)
2.2 四位置寻北最佳测量位置
四位置寻北方案陀螺最佳测量位置为45°,135°,225°和315°,具体的分析过程可参见文献[13],这里不再赘述。
根据前2节的分析,传统的二位置和四位置方案均存在2个影响系统精度的因素:
1)系统开始寻北的初始方位是随机的,而不同方位磁场的分布有差异,导致在不同初始位置时的寻北一致性较差;
2)在南北向附近时,陀螺对方位角的变化相对不敏感,寻北误差较大。
3 提高寻北一致性的方法
受不同方位磁场分布变化的影响,光纤陀螺输出呈现不同的特性。然而,对于一个固定方位,磁场对陀螺的影响是不变的,因此,若在不同初始方位的寻北过程中将陀螺测量位置固定在相同方向,则可以有效消除不同方位磁场变化引起的寻北误差。考虑二位置方案速度快和四位置方案精度高的优点及陀螺测量灵敏度,本文将寻北过程分为4个阶段:第1次二位置寻北;象限判别;第2次二位置寻北和四位置精寻北,具体如图2。
首先在初始位置处进行1次二位置寻北,象限判别后得到大致的方位角φ1;控制转台转动α1到达东西向(这里取3π/2)进行第2次二位置寻北得到φ2,由于开始寻北时初始位置处于任意方位,因此第2次二位置定向的第一采样位置不能严格到达3π/2方位,而是在其附近;控制转台转动α2到达四位置寻北第一测量位置(这里取7π/4),精寻北后得到φ3。四位置精寻北第一测量位置相对初始位置转过的角度为5π/4-φ1+φ2,则方位角寻北过程中第1次二位置寻北陀螺测量方位是随机的,通过第2次二位置寻北可以将四位置精寻北时的陀螺测量方位较精确地限定在预先设计的位置。
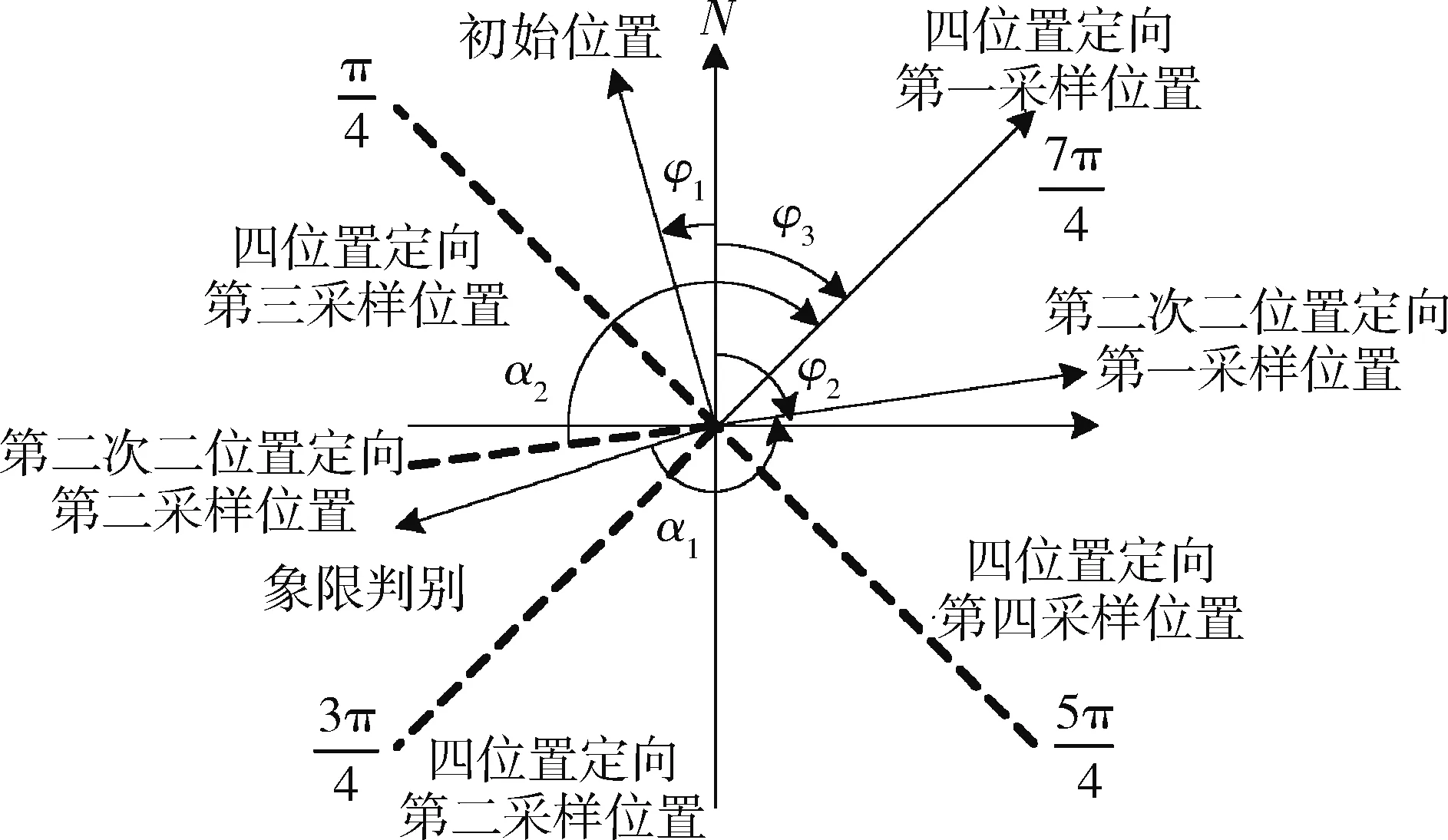
图2 寻北方案示意图
φ=2π-φ3-(5π/4-φ1+φ2)
=3π/4+φ1-φ2-φ3
(5)
4 试验验证及数据分析
在8个不同方位分别采用改进前后的寻北方案进行定向试验,验证本文所提方法的有效性。每个方位寻北10次,结果统计如表1。图3和图4直观地表示了改进前后寻北精度的变化。
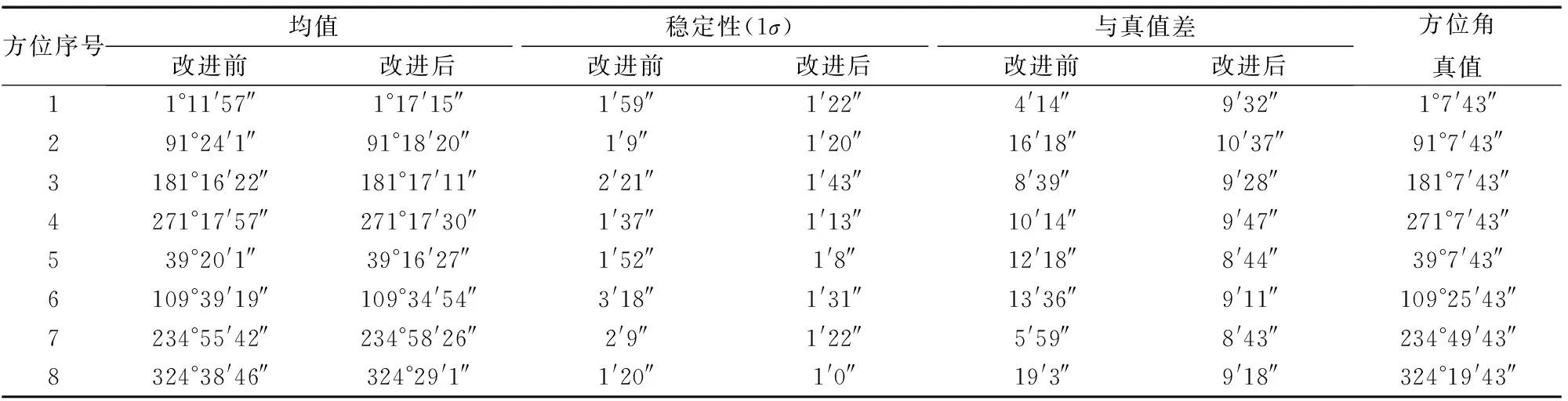
表1 改进前后寻北结果统计
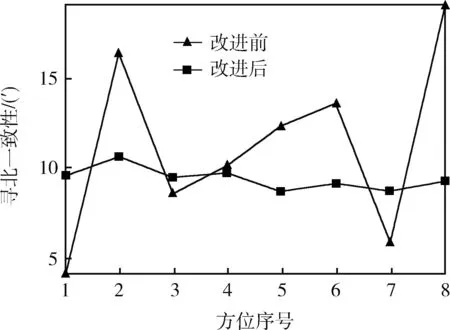
图3 改进前后不同方位寻北一致性比较
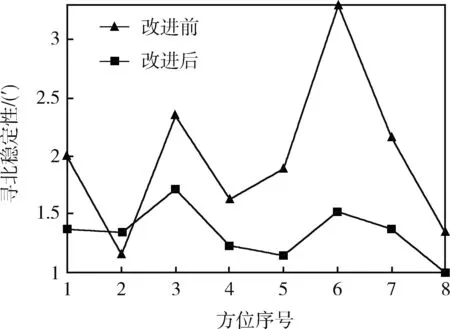
图4 改进前后不同方位寻北稳定性比较
由表1、图3和图4可以看出,采用本文提出的寻北方法后不同方位寻北一致性(由不同方位寻北均值与真值差的1σ值表示)得到明显改善,由5′2″提高到36″;同一方位多次寻北的稳定性也得到显著提高,最大1σ值由3′18″减小为1′43″。
5 结论
对不同方位磁场变化作用下光纤陀螺寻北一致性问题进行了研究,所得结论如下:
1)由于固定方位磁场对光纤陀螺的影响不变,在不同初始方位寻北过程中将陀螺测量位置固定在预先设定的方向,在不增加系统设计复杂度和成本的情况下有效克服了不同方位磁场变化对寻北一致性的影响,同时提高了同一初始方位处的寻北精度;
2)陀螺在不同方位对角度变化的敏感度存在差异,实际中应结合所采用的寻北方案选择最佳的测量位置,使仪表精度得到充分发挥,减小方法误差;
3)本文从系统角度出发,研究了寻北应用中不同方位磁场变化对寻北精度的影响,所采用的方法对光纤惯导多位置对准及光纤陀螺磁致误差的高精度补偿也具有一定参考价值。
参 考 文 献
[1] 周琪,秦永元,赵长山.光纤陀螺温度漂移误差的模糊补偿方案研究[J].传感技术学报,2010,23(7):926-930.(ZHOU Qi,QIN Yong-yuan,ZHAO Chang-shan.Research on Fuzzy Compensation Method of Temperature Drift for Fiber Optical Gyro[J].Chinese Journal of Sensors and Actuators, 2010, 23(7):926-930.)
[2] 张登伟,舒晓武,牟旭东,等.消偏光纤陀螺径向磁场问题的理论研究[J].传感技术学报,2005,18(4):867-870.(ZHANG Deng-wei,SHU Xiao-wu,Mou Xu-dong,et al.Theoretical Study on Radial Magnetic Field in Field-Optic Depola-rized Gyro[J].Chinese Journal of Sensors and Actuators, 2005,18(4):867-870.)
[3] Sung-Jin Kim,Sang-Sik Lee,Yong-Soo Kwon,et al.Dynamic North-finding Scheme Based on a Fiber Optic Gyroscope[J].SPIE,1997,3087:126-136.
[4] 邹向阳,孙谦,陈家斌,等.连续旋转式寻北仪的寻北算法及信号处理[J].北京理工大学学报,2004,24(9):804-807.(ZOU Xiang-yang,SUN Qian,CHEN Jia-bin,et al.A North-Finder Algorithm and Its Signal Processing of Continuous Rotary North-Finder[J].Transactions of Beijing Institute of Technology,2004,24(9):804-807.)
[5] 蒋庆仙,陈晓壁,马小辉,等.单轴光纤陀螺寻北仪[J].中国惯性技术学报,2010,18(2):165-169.(JIANG Qing-xian,CHEN Xiao-bi,MA Xiao-hui,et al.North Seeker Using Single Axis FOG[J].Journal of Chinese Inertial Technology,2010,18 (2):165-169.)
[6] 王立冬,王夏宵,张春熹.光纤陀螺寻北仪多位置寻北误差分析[J].压电与声光,2007,29(1):42-44.(WANG Li-dong,WANG Xia-xiao,ZHANG Chun-xi.The Multi-position North-seeking Error Analysis of FOG North-seeker[J].Piezoectrics & Acoustooptics, 2007,29(1):42-44.)
[7] SHEN Jun,GAO Wei-xi.Research of Geo-magnetic Effect on FOG North Finder[C].The 2ndInternational Conference on Information Science and Engineering, Dec.4-6,2010,Hangzhou,China.
[8] 王夏宵,宋凝芳,张春熹,等.光纤陀螺磁敏感性的试验研究[J].北京航空航天大学学报,2005,31(10):1116-1120.(WANG Xia-xiao,SONG Ning-fang,ZHANG Chun-xi,et al.Experiment Study on Magnet Sensitivity of Fiber Optic gyro[J].Journal of Beijing University of Aeronautics and Astronautics, 2005,31(10):1116-1120.)
[9] 李金涛,房建成.高精度光纤IMU的磁屏蔽方法及实验研究[J].航空学报,2011,32(11):2106-2116.(LI Jin-tao,Fang Jian-cheng.Magnetic Shielding Method and Experiment Study of Inertial Measurement Unit Based on High Precision Fiber-optic Gyroscope[J].Acta Aeronautica et Astronautica Sinica, 2011,32(11):2106-2116.)
[10] 石震,杨志强,田永瑞,等.基于高精度基准数据网的陀螺全站仪寻北精度及稳定性评价方法[J].测绘通报,2012,1:91-94.(SHI Zhen, YANG Zhi-qiang,TIAN Yong-rui,et al.A Evaluation Method for Gyro Total Station’s North-seek Accuracy and Stability Based on Reference Data Net[J].Bulletin of Surveying and Mapping, 2012,1:91-94.)
[11] GJB2863-97,《陀螺寻北仪通用规范》[S].
[12] 陈峰浴,缪玲娟.陆地导航系统寻北精度测试及标定方法研究[J].中国惯性技术学报,1993,1(1):33-36.(CHEN Feng-yu,MIAO Ling-juan.On the Measurement an Demarcation North-Seeking Accuracy of Land Navigation System[J].Journal of Chinese Inertial Technology, 1993,1(1):33-36.)
[13] 陈水华,杨清生,李永兵.光纤陀螺双四位置寻北方法研究[C].惯性仪表与元件学术交流会论文集,2003.
猜你喜欢
幼儿园(2021年12期)2021-11-06
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
火控雷达技术(2016年2期)2016-02-06