基于nanoPAN5375的地下停车场语音导航系统
2013-07-13 06:43郑逸生孙道宗姚耀华黄孝远
电子设计工程 2013年7期
郑逸生,孙道宗,姚耀华,黄孝远
(华南农业大学 工程学院,广东 广州 510642)
基于nanoPAN5375的地下停车场语音导航系统
郑逸生,孙道宗,姚耀华,黄孝远
(华南农业大学 工程学院,广东 广州 510642)
目前的GPS导航应用很成熟,精度也比较高,但在地下停车场等室内地方,GPS信号非常微弱,无法对车进行导航,同时当前的地下停车场没有很好地智能化。为避免车主盲目寻找车位,方便车主在尽可能短的时间内寻找到车位,设计并制作基于nanoPAN5375的语音导航系统。系统由4个nanoPAN5375模块、2个CC1101模块、超声波模块与isd1700模块构成。以STM32F103微控制器为核心芯片,使用nanoPAN5375模块进行无线定位,CC1101模块传输超声波模块采集到的车位信息,语音模块isd1700进行语音导航,软件采用三边质心算法和卡尔曼滤波算法。实验表明,在边长为6米的等边三角形内,x坐标的平均误差为0.42米,y坐标的平均误差为0.42米;系统在边长为12米的等边三角形内实现过较为精确的语音导航。
无线定位;nanoPAN5375模块;三边质心算法;语音导航
目前的GPS导航应用很成熟,精度也比较高,但在地下停车场等室内地方,GPS信号非常微弱,无法对车进行定位,从而实现导航功能,同时当前的地下停车场没有很好地实现智能化,车主只能盲目地寻找车位。语音作为自然的人机接口,可以使车载导航系统实现更安全、更人性化的操作。当前的地下停车场导航系统大多是以LED屏导航,相比之下,语音导航的效率更高,可方便、及时、准确、主动地为车主提供语音信息,帮车主节省停车时间,因此,实现地下停车场的语音导航就显得十分重要。文中将讲述基于nanoPAN的无线定位,从而实现语音导航的引导车载系统。
1 系统结构及硬件电路设计
系统以Cortex-M3系列ARM7芯片 STM32F103微控制器为核心,包括nanoPAN5375模块、CC1101射频模块、超声波模块、语音模块isd1700等电路,系统总体方案如图1所示。
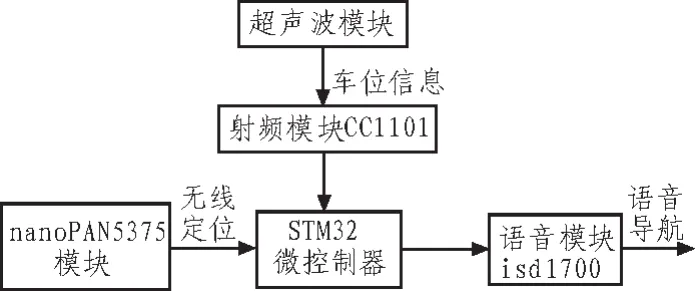
图1 系统总体框图Fig.1 Diagram of system
1.1 nanoPAN5735模块
nanoPAN5375是一款基于 2.4 GHzISM频带 (2.400~2.483 5 GHz)上整合了放大、滤波等组件的RF模块,它采用了nanotron的宽带线性调频扩频(CSS)全球专利技术,可灵活地提供31.25 kbps~2 Mbps范围的数据传输率,抗干扰性、动态特性非常好,同时提供具有极佳传输范围的可靠数据通信。通过采用一个技术成熟的MAC控制器,可大大降低对微处理器和软件的要求,轻松地完成高级别系统的设计[2]。nanoPAN5375模块如图2所示。

图2 nanoPAN5375模块Fig.2 Picture of nanoPAN5375 module
2 主要软件设计
系统主要包含主机、固定节点和车位信息采集3个部分。主机通过nanoPAN5375模块测得与3个固定节点的距离,经过三边质心算法确定车的位置,再经过卡尔曼算法滤波;通过CC1101模块接收超声波模块采集到的车位信息,控制isd1700模块播报语音[6-7]。软件主要包含nanoPAN5375的测距、三边质心算法、卡尔曼滤波算法、CC1101模块的信息接收、语音播报等功能。固定节点部分的nanoPAN5375模块处于等待接收的状态,接收到测距信息时,反馈回主机。车位信息采集是通过控制超声波模块测距,判断车位是否是空车位,通过CC1101模块发送到主机。
如图3所示,三边质心算法主要实现确定主机的位置,系统通过测量主机到3个固定节点的距离,计算相交圆的公共区域的质心来提高对主机位置估算的精度[1,3,5]。
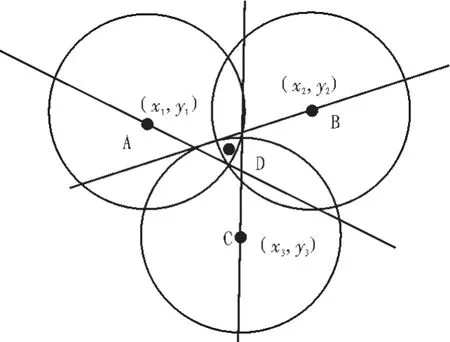
图3 三边质心法Fig.3 Method of trilateral centroid
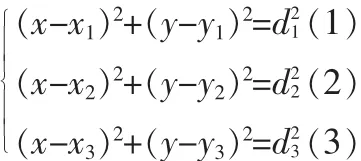
设未知节点 D 坐标(x,y),已知 A,B,C 3 个点坐标分别为(x1,y1),(x2,y2),(x3,y3) ,它们到 D 的距离分别为 d1,d2,d3。则可得如下方程组:
根据式 (1)、(2)、(3) 可解出圆 A 与圆 C 的交点(xac1,yac1),(xac2,yac2), 圆 B 与圆 C 的交点(xbc1,ybc1),(xbc2,ybc2),圆 A与圆 B 的交点(xab1,yab1),(xab2,yab2)。
通过将圆 A 与圆 C 的交点(xac1,yac1),(xac2,yac2)代入式(xx2)2+(y-y2)2,判断大小可找出2点距圆 B的圆心较近的点,假设为(xac1,yac1)。同理可找出圆B,圆C交点中距圆A较近的点,设为(xbc1,ybc1),圆A,圆 B交点中距圆 C的圆心较近的点设为(xbc1,ybc1)。
依据质心思想估算未知节点的坐标为

根据以上算法求出主机的位置之后,再利用卡尔曼滤波的推测值来校正主机的测试值,提高系统精度。
卡尔曼滤波是一种高效率的递归滤波器 (自回归滤波器),它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。目标的位置、速度、加速度的测量值往往在任何时候都有噪声。卡尔曼滤波利用目标的动态信息,设法去掉噪声的影响,得到一个关于目标位置的好的估计。这个估计可以是对当前目标位置的估计,也可以是对于将来位置的估计(预测),也可以是对过去位置的估计(插值或平滑)[4]。
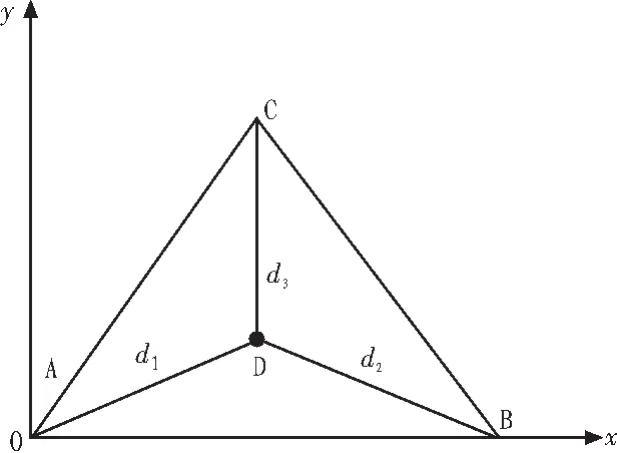
图4 主机和节点的分布示意图Fig.4 Distributed diagram of anchor and tags
3 系统测试与测试结果
系统测试节点和主机的分布示意图如图4所示。将3个节点固定在边长为12 m的等边三角形的3个顶点上,当超声波模块检测到空车位时,主机选择最近的空车位进行导航,当前方5m处有交叉路口时,提示车主“向左转”或“向右转”,将人准确地导航至目标地址。在边长为6 m的等边三角形内,测量主机的位置坐标,并记录数据如表1所示。
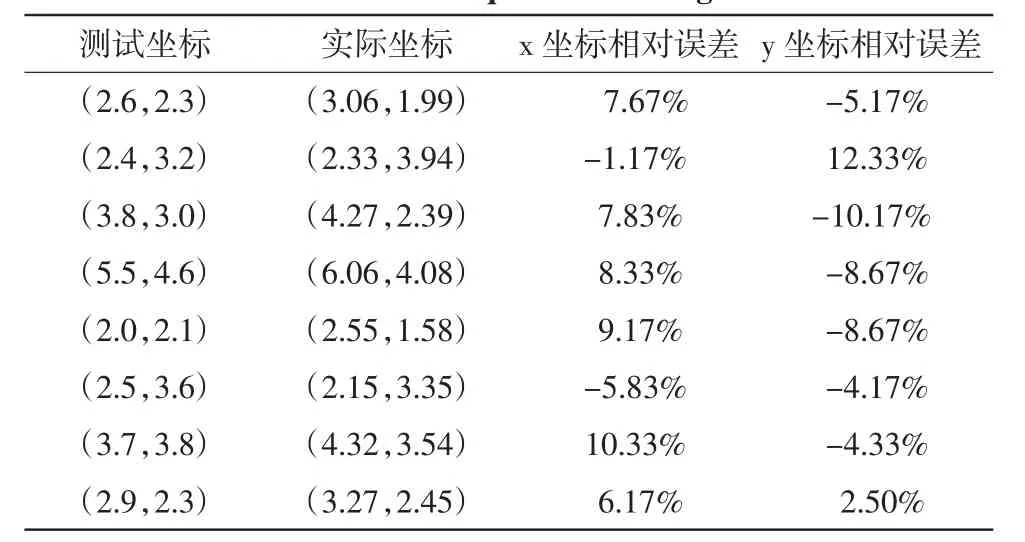
表1 在边长为6 m的等边三角形内的测试Tab.1 Test in the equilateral triangle of 6 m
实验结果表明,节点的距离增大时,经过三边质心算法和卡尔曼滤波算法,得到非常精确的坐标值,主机与3个节点在较大范围测量的距离如表2所示。
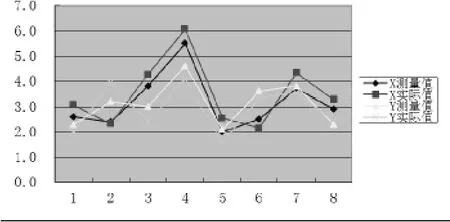
图5 表1的数据曲线Fig.5 Data curve of table 1
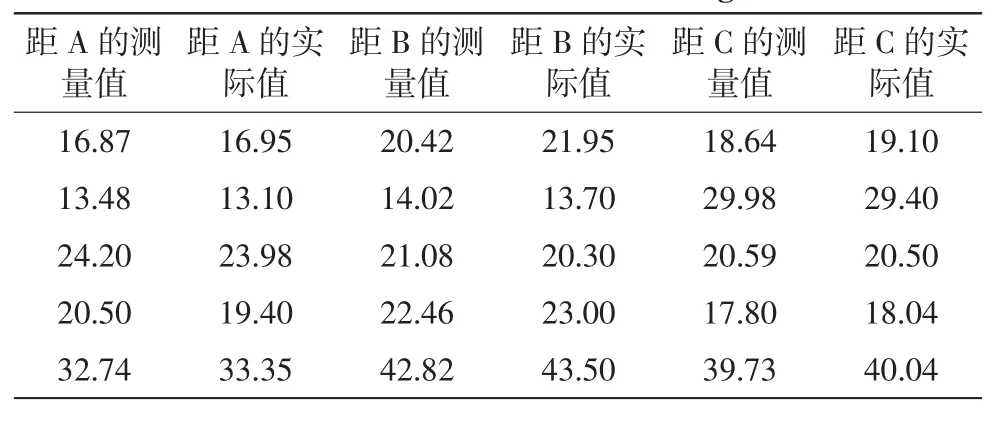
表2 主机与3个节点的距离Tab.2 Distance of anchor to tags
4 结 论
本地下停车场语音导航系统以Cortex-M3系列ARM7芯片STM32F103微控制器为核心,包括nanoPAN5375模块、CC1101模块、语音模块isd1700、超声波模块等电路,软件采用三边质心算法和卡尔曼滤波算法。试验表明,在边长为6 m的等边三角形内,x坐标的平均误差为0.42 m,最大误差为0.62 m,y坐标的平均误差为0.42 m,最大误差为0.74 m;在边长为70 m的等边三角形内,x坐标的误差为0.33 m,y坐标的误差为0.36 m。由于小汽车的长度均大于4 m,因此上述误差不影响对车的导航。经过测试,该系统能将人较为精确地导航至目标位置。
[1]高雷,郑相全,张鸿.无线传感器网络中一种基于三边测量法和质心算法的节点定位算法[J].自然科学,2009(23):138-141.
GAO Lei,ZHENG Xiang-quan,ZHANG Hong.A nodelocalization algorithm for wireless sensor network based on trilateration and centroid algorithm[J].Natural Science,2009(23):138-141.
[2]杨骏,陈建政,冯艳波.基于NanoPAN5375的测力论对无线传输系统[J].工程与实验,2009(4):75-77.
YANG Jun,CHEN Jian-zheng,FENG Yan-bo.Wireless transmission system of measuring wheelset based of NanoPAN5375[J].Engineering&Test,2009(4):75-77.
[3]叶蔚.室内无线定位的研究[D].广州:华南理工大学,2010.
[4]宋迎春.动态定位中的卡尔曼滤波研究[D].长沙:中南大学信息物理工程学院,2006.
[5]裴庆祺,赵军.基于网格分布的三角形内点测试定位算法[J].计算机工程与设计,2008(29):4658-4661.
PEI Qing-qi,ZHAO Jun.Grid placement-based point-intriangulation in wireless sensor network[J].Computer Engineering and Design,2008(29):4658-4661.
[6]刘春荣.基于SPCE061A单片机车载语音导航系统的研究[J].微计算机应用,2009(30):77-80.
LIU Chun-rong.Vehicle voice navigation system’s research based on SPCE061A microcomputer[J].Microcomputer Applications,2009(30):77-80.
[7]杜甲印,孙志锋.嵌入式车载语音导航系统的语音提示设计[J].机电工程,2007(24):28-30.
DU Jia-yin,SUN Zhi-feng.Design of the voice of embedded navigation system[J].Mechanical&Electrical Engineering Magazine,2007(24):28-30.
Voice navigation system of underground parking lot based on nanoPAN5375
ZHENG Yi-sheng, SUN Dao-zong,YAO Yao-hua, HUANG Xiao-yuan
(College of Engineering, South China Agricultural University, Guangzhou 510642, China)
Currently GPS navigation application is proper mature and has a high precision,but it has a very weak signal at underground parking lots and other indoor places.In these cases, GPS signal can’t navigate the cars, and at the same time,the current underground parking lots are not in good intelligence.In order to avoid the owner to look for the parking blindly and make the owner’s convenience to look for the parking, a voice navigation system is designed and produced based on nanoPAN5375.The system consists of four nanoPAN5375 modules, two CC1101 modules, ultrasonic module and isd1700 module.With STM32F103 micro controller as the core chip, nanoPAN5375 module for wireless positioning, CC1101 module transmission ultrasonic module to collect the parking information, voice module isd1700 for speech navigation, the software adopts Trilateral Centroid Algorithm and Kalman Filtering Algorithm.Experiments show that,in 6 meters side length of an equilateral triangle, the average error of x coordinate is 0.42 meters, y coordinate’s is 0.42 meters; the system within 12 meters side length of an equilateral triangle achieves a relatively accurate voice navigation.
wireless location;nanoPAN5375 module;trilateral centroid algorithm;voice navigation
TN962
A
1674-6236(2013)07-0062-03
2012-11-21稿件编号201211182
广东省科技计划项目(2011B020313019)
郑逸生(1989—),男,广东汕头人。研究方向:嵌入式系统在无线定位中的应用。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
河北理科教学研究(2021年2期)2021-08-18
中等数学(2021年1期)2021-07-23
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
音乐天地(音乐创作版)(2019年10期)2020-01-06
现代家长(2018年11期)2018-01-05
航天器工程(2014年5期)2014-03-11
中国工程咨询(2012年8期)2012-02-14