模糊自适应PID在汽车底盘测功机中的仿真研究
2013-07-13 06:43陈文会刘小民
电子设计工程 2013年7期
郭 磊,陈文会,刘小民
(1.西北工业大学 电子信息学院,陕西 西安 710072;2.陕西脉航交通测控有限公司 陕西 西安 710000)
模糊自适应PID在汽车底盘测功机中的仿真研究
郭 磊1,陈文会1,刘小民2
(1.西北工业大学 电子信息学院,陕西 西安 710072;2.陕西脉航交通测控有限公司 陕西 西安 710000)
在汽车底盘测功机研究中,由于汽车底盘测功机是一个复杂的时变非线性、大惯性系统。传统的PID控制对于非线性、时变性的系统难以达到控制精度的要求,而模糊自适应PID控制具有在线自动调整的功能,从对传统的PID与模糊自适应PID比较的基础上,分析了参数对系统性能的影响,并利用MATLAB软件中的模糊工具箱对连续系统进行了仿真,离散系统采用编程仿真,比较结果表明,模糊自适应PID控制器具有良好的跟踪性能,超调量小、控制精度高、调节速度快,可以实现对PID参数的最佳调整。
模糊控制;自适应PID;MATLAB;SIMULINK
智能PID控制器把古典的PID控制与先进的专家系统相结合,实现系统的最佳调整。这种控制必须精确的确定系统的模型,首先将操作人员长期实践积累的经验知识用控制规则模型化,然后运用推理可对PID参数实现最佳调整。
文中在汽车底盘测功机控制的基础上,针对常用的工业对象模型,该系统模型具有变参数、强干扰、大滞后等特点,将模糊控制与自适应PID控制相结合,设计了模糊自适应PID控制器,能够实现对kp、ki、kd的自动在线调整。其仿真结果表明模糊自适应PID控制系统性能优于PID控制,且具有响应时间短,控制精度高,超调量小,稳定性好等优点,能够适应复杂对象的要求。
1 模糊自适应PID控制器
1.1 PID控制原理
PID控制系统原理如图1所示[2]。将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
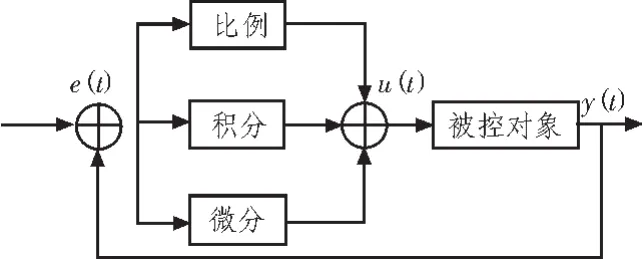
图1 PID控制系统原理图Fig.1 Schematic of PID control system

式中,u(t)为 PID控制器的输出,t为采样时间,kp为控制器的比例增益;e(t)为PID控制器的偏差输入,即给定值与测量值之差;TI为控制器的积分时间常数;TD为控制器的微分时间常数。
对于连续时间类型,PID控制系统的标准方程为:
1.2 模糊自适应PID控制器原理
自适应模糊PID控制器是以误差e和误差的变化率ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。其结构图如图2所示。

图2 自适应模糊控制器结构Fig.2 Adaptive fuzzy controller structure
从系统的稳定性、响应速度、超调量和稳态精度等各个方面来考虑,kp、ki、kd的作用如下[2]。
1)比例系数kp的作用是加快系统的响应速度,提高系统的调节精度,kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。
2)积分系数ki的作用是消除系统的静态误差。ki越大,系统的静态误差消除的越快,但ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。
3)微分作用系数kd的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向变化,对偏差变化进行提前预报。但kd过大,会使响应提前制动,从而延长调节时间,而且会降低系统的干扰性能。
1.3 模糊自适应PID控制系统的设计
设计模糊自适应PID控制系统的核心是设计模糊控制器,在设计模糊控制器的过程中,确定模糊控制器的结构、建立模糊规则并选定近似推理算法是两个核心工作,与之配套的是设计模糊化模块、选择模糊子集的隶属度函数、设计清晰化模块并选择清晰化方法。其中根据积累的人工操作经验或测试数据,建立模糊控制规则是设计最为核心的工作[3]。
1.3.1 量化因子和比例因子
量化因子和比例因子除了进行论域变换,使前后模块匹配之外,在整个系统中还有一定的调节作用。因为它的变化相当于对实际测量信号的放大或缩小,直接影响着采样信号对系统的调节控制作用。文中为了便于比较模糊自适应PID与经典的PID控制效果,将kp、ki、kd3个因子不再变化,而是通过改变模糊论域和量化因子、比例因子的方法改变输出量。
1.3.2 模糊论域及隶属度函数的确定
E为输入误差e的语言变量,EC为误差变化率的语言变量。 {-3,-2,-1,0,1,2,3}为 E 和 EC 的论域,它们的模糊子集为{NB(负大),NM(负中),ZO(零),PS(正小),PM(正中),PB(正大)}。 它们的模糊子集为{NB(负大),NM(负中),ZO(零),PS(正小),PM(正中),PB(正大)}。 kp、ki、kd的量化范围为(-0.3,0.3),(-0.06,0.06),(-3,3)。 其隶属度曲线如图 3 所示。通过各曲线的比较,隶属度曲线采用双高斯型曲线。kp、ki、kd的隶属度曲线和图3相似,只是论域范围不同。
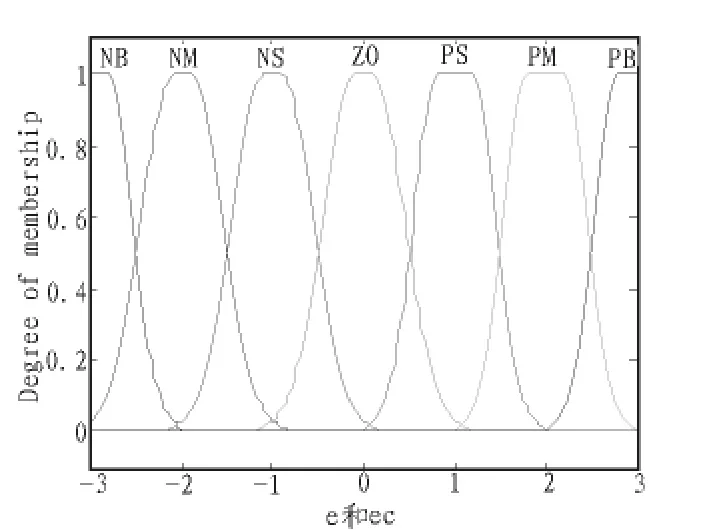
图3 E和EC的隶属度函数Fig.3 Membership function of E and EC
1.3.3 解模糊方法
模糊推理采用广泛应用的Mamdani算法,其合成方式直接采用极大极小运算。本仿真在对其他解模糊方法[3]尝试的基础上,通过比较选出最优方法——最大隶属度中取小方法即som法。
设有 n 个点的隶属度都取最大值,即 A(uj)=max(A(u)),j=1,2,....n,则取绝对值最小的点 min(|uj|)=|uk|作为模糊集合的代表点。
1.3.4 模糊控制规则
kp、ki、kd的模糊控制规则表建立好以后,根据模糊论域和隶属度函数可以求出各个子集的隶属度,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查表修正参数带入下式计算[4]:

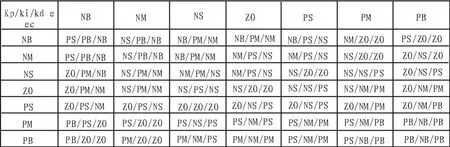
图4 参数调整规则表Fig.4 Parameter adjustment rule table
2 模糊自适应PID控制仿真及结果分析
2.1 SIMULINK仿真
打开MATLAB的SIMULINK工具箱,利用SIMULINK内的子模块库设计仿真电路,设计时调整好各个模块的参数,如各种数值算法、仿真时间、仿真步长等。为了便于调整,对其中的部分模块进行了封装,封装成不同的子模块。最后可将结果送入模拟示波器给予显示,或送到工作空间,如仿真结果不满意,可适当调整量化因子和比例因子,再调整模糊规则和隶属度函数。
仿真时采用的系统函数为工业常用的仿真系统,其系统函数为:
仿真图如图5所示,仿真时间为50 s,是对连续控制系统进行的模拟。仿真前首先在MATLAB的Command Window中输入sub_1=readfis(‘sub_1’),使模糊控制规则读入到工作空间,然后双击 Fuzzy Logic Controller,添加 sub_1(模糊控制规则)到模糊逻辑模块。为了便于比较,将模糊自适应PID控制与经典的PID控制在同一模块中仿真。
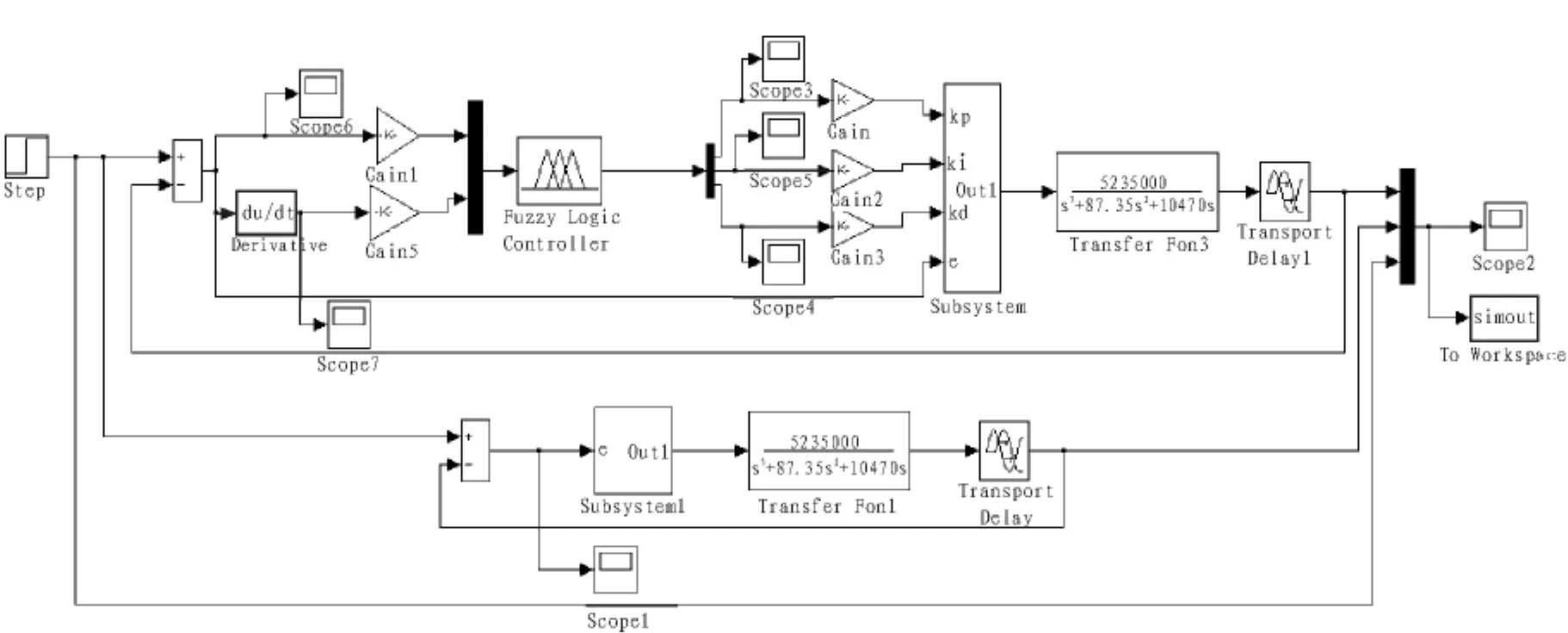
图5 连续系统的自适应模糊PID控制系统设计框图Fig.5 Continuous system of adaptive fuzzy PID control system design diagram
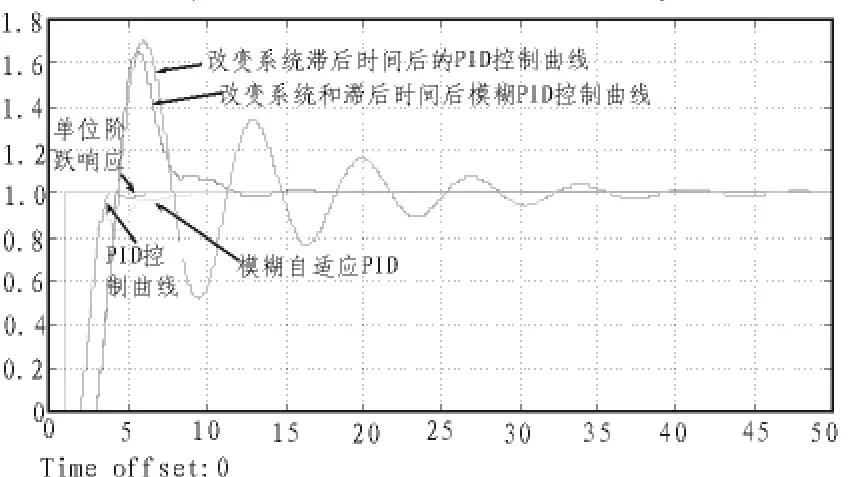
图6 模糊自适应PID与PID阶跃响应比较曲线图Fig.6 Fuzzy adaptive PID and PID step response comparison curves
其参数整定原则如下:
1)当误差绝对值较大时为使系统具有较好的跟踪性能,应取较大kp的与较小的kd。
2)当误差绝对值和误差变化率的绝对值中等大小时,为使系统超调较小,kp应取得小。
3)当误差绝对值较小时,为使系统具有较好的稳定性,kp与ki均应取大些,同时为避免系统在设定值出现振荡,当误差变化率绝对值较大,kd可取得小些,较小时,kd可取大一些。
具体调整规则如下:先整定 kp、令 ki、kd均为零,使 kp由小到大,找出最佳响应曲线,确定好kp的最优值,在此基础上将ki有小到大,找出静态误差最小时的最佳ki值,然后,观察曲线的超调量大小,若超调量过大,使kd由小到大逐步调节,边调节边观察超调量的大小,找出最佳的kd,而使超调量最小,若超调量在允许的范围内,可令kd=0,反复上述过程,找出最佳的 kp、ki、kd。
2.2 软件编程仿真
利用MATLAB提供的运行环境,编写M文件,仿真时间为1 s,采样时间为1 ms,将模糊PID控制和PID控制分别进行仿真,在第500个采样时间控制输入加入1.0的脉冲干扰,其工作流程图如图7所示。
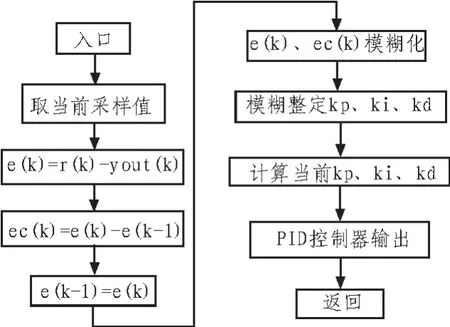
图7 工作流程图Fig.7 work folw chart
仿真结果如图8,9所示。
3 结 论
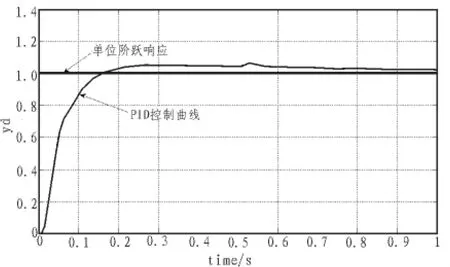
图8 离散系统PID控制曲线Fig.8 PID control curve of discrete system
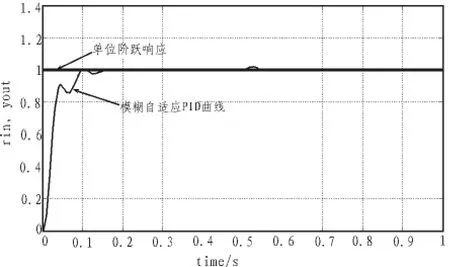
图9 离散系统模糊自适应PID控制曲线Fig.9 Fuzzy adaptive PID control curve of discrete system
在经典PID控制[7]的基础上设计了模糊自适应PID控制系统,该系统基于大滞后、时变、非线性等复杂环境,从上图的SIMULINK和软件编程仿真结果可以看出,PID参数的调节对系统的性能影响很大,良好的参数设置使得模糊自适应PID控制器具有响应速度快、超调量小、控制精度高等优点,具有良好的跟踪性能,较好的抗干扰性能,较强的鲁棒性能,可以达到系统控制精度的要求。在控制系统中被广泛应用,为下一步应用于汽车底盘测功机作准备。
[1]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2011.
[2]张金焕.PID控制系统和模糊自适应PID控制系统的研究及比较[J].武汉理工大学学报,2005,25(5):286-287.
HANG Jin-huan.Research and comparision of PID control systemandfuzzyPIDcontrolsystem[J].ManagementEngineering Wuhan University of Technology,2005,25(5):286-287.
[3]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,北京交通大学出版社,2008.
[4]张泾周,杨伟静,张安祥.模糊自适应PID控制的研究与应用仿真[J].计算机仿真,2009,26(9):133-134.
ZHANG Jing-zhou,YANG Wei-jing,ZHANG An-xiang.The research and application simulation of Fuzzy PID control[J].Computer simulation,2009,26(9):133-134.
[5]刘绍鼎,樊立萍,姜长洪.基于模糊规则参数自整定PID控制器的设计[J].微计算机信息,2007,23(4-1):50-51.
LIU Shao-ding,FAN Li-ping,JIANG Chang-hong.Self-tuning PID controller design based on fuzzy rule parameters[J].Microcomputer Information,2007,23(4-1):50-51.
[6]YANG Hua-fen,XU Jian,DONG De-chun,etla.Study on fuzzy PID control in double closed-loop DC speed regulation system[J].Department of Computer Science and Engineering,2011:1354-1358.
[7]孙晓玲,惠晶.基于自适应模糊PID算法的光伏系统MPPT控制[J].现代电子技术,2010(22):181-183.
SUN Xiao-ling,HUI Jing.MPPT strategy of PV system based on adaptive fuzzy PID algorithm[J].Modern Electronics Technique,2010(22):181-183.
Simulation research of fuzzy adaptive PID control in the vehicle chassis dynamometer system
GUO Lei1, CHEN Wen-hui1, LIU Xiao-min2
(1.School of Electronic Information,Northwestern Polytechnical University, Xi’an 710072, China;2.Pulse traffic Control of shanxi Co.Ltd., Xi’an 710000, China)
The vehicle chassis dynamometer is a complex nonlinear and time-varying inertial system.It is difficult for traditional PID control to meet the requirements of precision and it is not fit for nonlinear time-varying system and fuzzy adaptive PID control has the function of on-line automatic adjustment.In this paper,we make the comparison of the traditional PID and fuzzy adaptive PID,and analysis parameters on system performance, and take advantage of the fuzzy toolbox in MATLAB software for continuous system simulation,and discrete system using programming simulation.Results show that the fuzzy adaptive PID controller has good tracking performance, smaller overshoot control, higher precision speed adjustment,These performances can achieve the best adjustment of the PID parameters.
fuzzy control;adaptive PID;MATLAB;SIMULINK
TP29
A
1674-6236(2013)07-0076-04
2012-11-12稿件编号201211080
郭 磊(1986—),男,山东滕州人,硕士研究生。研究方向为:电子与通信工程。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
汽车维修与保养(2015年6期)2015-04-17
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年2期)2015-02-28
汽车科技(2014年6期)2014-03-11
筑路机械与施工机械化(2014年4期)2014-03-01