基于路径流的多粒度交通仿真研究
2013-07-31 21:35田宗忠周学松
交通运输系统工程与信息 2013年2期
杜 鹏,田宗忠,周学松
(1.北京交通大学交通运输学院城市交通复杂系统理论与技术教育部重点实验室,北京100044; 2.内华达大学里诺分校,里诺89557,内华达州,美国;3.犹他大学,盐湖城84112,犹他州,美国)
基于路径流的多粒度交通仿真研究
杜 鹏*1,田宗忠2,周学松3
(1.北京交通大学交通运输学院城市交通复杂系统理论与技术教育部重点实验室,北京100044; 2.内华达大学里诺分校,里诺89557,内华达州,美国;3.犹他大学,盐湖城84112,犹他州,美国)
针对局部交通状况分析所需要的多粒度仿真功能,本文分析了从宏观规划模型到微观仿真模型转换时的逻辑保证和数据需求,设计了一种基于路径流的多粒度交通仿真方法,从物理、逻辑和运行三个层面实现了从基于点和线的宏观路网到基于车道的微观路网的转换.针对转换过程中交通小区质心及其路网连接线等虚拟实体的处理问题,本文进一步提出了新的支路近似方法.基于上述方法,开发了适用于TransCAD和VISSIM模型转换的软件包,方便地实现了从宏观路网中局部区域交通状况分析到微观路段交通流量仿真的一致性转换.
交通工程;多粒度仿真工具;一致性转换;局部交通分析;基于车道的扩展;连接线转换
1 引 言
近年来,对宏观路网中局部区域交通状况进行更为细致地展示和分析已逐渐成为交通工程领域一种重要的研究手段,这种局部交通状况分析需要对相应的路网和交通行为进行多粒度刻画.目前,根据所针对的路网规模和对交通设施实体刻画程度的不同,交通工程领域常用的软件工具一般可以分为宏观软件、中观软件和微观软件三类,各类软件对交通设施实体的刻画程度往往固定,很难实现对交通流的多粒度展示.因此,在进行局部交通状况分析时,合适的软件工具便显得非常重要.
Horowitz[1]提出了一种中微观交通仿真方法,可以在基于中观仿真的大范围路网中定义一个局部区域,并针对该区域进行微观仿真.Horowitz的方法对多粒度数据进行分层管理,设计了网络层、路段层、坐标层、规则层和物理层.当分析角度在个体车辆和车流之间转换时,这种层次型数据结构极大地提高了计算效率.Burghout[2,3]将基于事件的中观模型Mezzo分别与微观模型MITSIMLab和VISSIM集成,提出了两种中微观混合仿真模型,其中Mezzo用于对区域路网的仿真,而对于重点关注的局部,则可通过微观仿真进一步研究.Burghout的混合仿真模型对于保持不同粒度模型在路径选择、路网表示和交通流特征等方面的一致性给予高度重视.尽管该模型采用组件技术方便了微观仿真器的集成,但并不能集成所有的功能.Casas等人[4]设计了一个基于元事件的仿真器(Meta-Event-Oriented Simulator)来同步中、微观两种粒度的仿真,使中、微观仿真能够同时运行,在不牺牲中观仿真计算效率的同时也提供了较为详细的微观刻画精度.李永刚[5]等建立了基于GIS的多粒度复杂网络模型,用于研究城市交通网络故障的动态演化.
通过以上分析可以看出,多数研究是在既有单一粒度模型基础上进行集成,开发一套全新的多粒度仿真工具的情况并不多见.采用集成方法来进行多粒度仿真研究已经成为一个趋势.集成方法的优势在于可以充分利用既有的成熟模型及成果,所建立的多粒度模型具有较高的可信度.
本研究针对在宏观交通规划建模中进行微观交通仿真的需求,提出了一种基于路径流的多粒度仿真方法,实现了从宏观路网中局部区域交通状况分析到微观路段交通流量仿真的转换.文章对其中所涉及的路网扩展、车辆路径生成和虚拟交通网络点线的处理给出了详细的解决方案,并进行了实例验证.
2 基于路径流的多粒度仿真模型
从宏观模型到微观模型的转换中,需要将点线网络转换为基于车道的网络,将路段车流量转换为个体车辆的运行路径.从以上回顾中,可以总结出进行局部交通状况分析时需要的多粒度仿真工具一般应具备以下功能:
(1)从区域交通网络中定义并选择一个局部地区;
(2)扩展以点线形式描述的路网至基于车道的路网;
(3)重新构建局部地区的质心和连接线并与原模型保持一致;
(4)重新构建局部地区的交通出行并与原模型保持一致.
不同粒度模型的转换过程中,必须保持路网和车辆行为的一致性,为此我们提出了基于路径流的方法,其主要转换流程和不同粒度实体间的对应关系如图1所示.
面向规划的宏观模型一般包括点线路网和集计的车流数据两大类,如图1左列所示.其路网中既有表示交叉口和路段的物理点线,也有表示质心和连接线的虚拟点线.微观仿真模型所需要的数据尽管也可分为路网数据和车辆数据两类,如图1右列所示,但是对实体的刻画程度要求不同,例如路网以车道为基础,车辆信息要求能够刻画个体车辆行为.图1中间列描述了本文提出的从宏观规划模型到微观仿真模型的一致性转换流程.网络结构转换中,点线形式的宏观路网扩展为基于车道的微观路网,虚拟的质心转换为车辆产生和消失点,连接线近似为车辆进入和离开路网的支路;交通量转换时,通过中观层面的流量分配获得基于路径的交通量.
在选定的局部地区,需要沿边界产生新的交通小区.考虑到在宏观模型中由路段流量倒推出OD比较困难,因此尽管局部地区的路段流量与原网络相比保持不变,却不能用来构建新的OD矩阵.本研究中,中观配流工具DTALite[6]被集成到软件包中,用于产生基于个体车辆的路径流,进而生成局部地区的与原网络一致的OD矩阵及交叉口转向流量等数据.
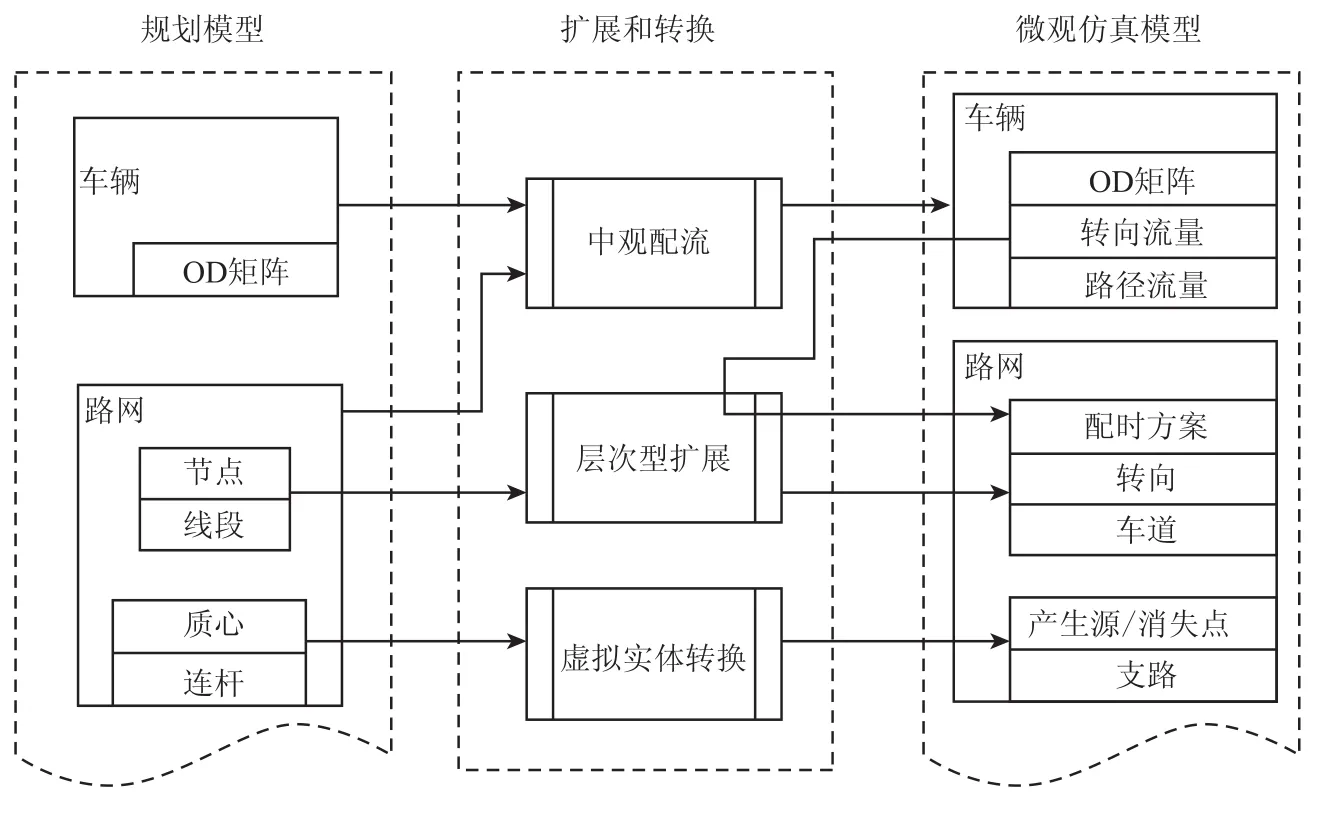
图1 多粒度仿真模型框架Fig.1 Cross-resolution simulation framework
3 路网和车流的一致性转换
3.1 层次型扩展
在规划模型的点线网络结构基础上,本文提出了层次型扩展方法,通过物理层、逻辑层和运营层的扩展,将点线网络扩展为基于车道的微观网络,如表1所示.
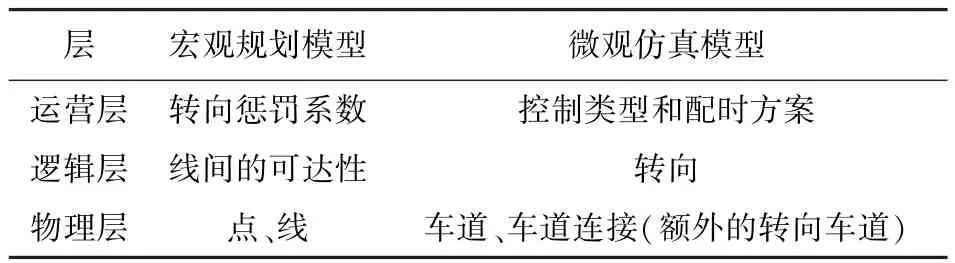
表1 规划模型到微观仿真模型的层次型扩展Table 1 Hierarchical expansion from macro-model to micro-model
物理层扩展时,进入和离开交叉口的路段依据车道数和转向规则等属性进行扩展.考虑到车道的连续性,软件包将根据不同的情况自动在路段与交叉口衔接处增加左转弯转向车道或右转弯专用车道.在进行逻辑层扩展时,结点所衔接路段间的可达性被扩展为相应的转向,并被定义在物理层的转向车道或车道组上,同时,根据各流线间的空间和逻辑关系,软件包自动判断并生成冲突区域.在交通运营实际中,交叉口的控制类型及信号控制路口的信号配时方案对于各方向的通行能力至关重要.因此在运营层的扩展中,软件包能够自动根据前两层扩展所获得的路口几何形状和转向车流量判断并确定交叉口控制类型,如果是信号控制交叉口,同时生成配时方案.
3.2 虚拟实体的近似处理
交通规划模型中交通分析小区(TAZ)的质心和连接线是为了简化建模而设置的虚拟实体,承担了出行产生、消失和转移的功能,但在实际交通系统中并不存在.在析出局部地区的过程中,除了对物理网络实体进行扩展外,如何处理虚拟实体及如何重新生成车流量数据对于保持局部地区与原宏观模型的交通状况一致性至关重要.

图2 转换虚拟实体方法示意图Fig.2 Conversions of virtual objects
图2(a)显示了一个典型的规划模型中的路网的一部分,结点E、F、G和H为代表实际交叉口的物理结点,相互间的线段代表实际路段,即图中实线表示的线段,而其中结点O、P和Q则是表示小区质心的虚拟结点,连接虚拟结点与实际路网间的连接线也是虚拟实体,即图中虚线表示的线段,箭头表示车流产生和消失的方向.结点A、B、C和D也是虚拟结点,虽在物理路段上,但却区别于表示交叉口的物理结点.
规划模型中的虚拟实体如果直接转为微观模型的交叉口和路段,会产生很多不合理的问题.例如,如图2(a)所示,不加处理的直接转换后,包括O、P和Q及A、B、C和D在内的虚拟结点都转换成了交叉口,虚线所表示的虚拟连接线也成为了物理路段,显然不切实际,违背了微观模型与宏观模型一致性的原则.另外,从车流的角度,会出现穿过质心的车流,以及只经过连接线的车流,如图2(a)中所示沿O、B和Q走行的车流,这些不切实际的车流也会使仿真模型不可信.因此必须设计合理的处理方法,保持微观模型与宏观模型间的一致性.
方法0 不做处理
如前分析,将导致微观模型与宏观模型不一致,仿真结果不可信.
方法1 完全删除
与前一方法完全相反,该方法在转换前删除所有虚拟实体.为保持出行径路的完整,质心被合并到临近的交叉口,连接质心和实际路网的连接线也不再存在.这种方法产生的路网贴近实际,但是车辆的产生和消失均发生在交叉口,显然与实际车辆行为不符,影响仿真结果的可信度.
方法2 部分删除
为了既保留车辆产生的功能,又不至于影响交叉口的车辆行为,橡树岭国家实验室的DYNASMART采用了部分删除虚拟点线的方法,即保留质心和进入实际路网的连接线,删除车辆消失的连接线,质心只有产生车辆的功能,车辆的消失点被映射到质心临近的实际路段上,如图2(b)所示.与图2(a)相比,虽然质心和连接线仍然被转换为物理实体,但是仅有单方向车辆行驶.对路段上车辆实际行驶行为刻画的真实程度有所提高,但是路网中仍存在实际情况中没有的交叉口,而且出现了车辆在路段中间的某处突然消失的情况,这些现象不符合实际情况.
方法3 禁止部分转向行为
与前几种方法处理网络结构不同,该方法并不处理网络结构,而是通过在微观仿真模型中增加规则,禁止不切实际的车辆行为来实现微观模型和宏观模型的一致性.例如,图2(a)中,B点不是真实的交叉口,因此OB方向过来的车辆在B点禁止直行,从而避免了类似OBQ之类的不切实际的车流.但是该方法增加了微观模型的建模工作量,且微观模型中的路网中仍然有质心和连接线,与实际路网仍有较大差异.
方法4 复制质心、分离产生和消失点
文献[7]提出了一种处理质心的方法,如图2(c)所示,将原有质心复制为两个独立结点,分别表示车辆的产生源和消失点,并通过单向的连接线连入路网.该方法与方法2有些类似,避免了一些不切实际的车流,而且车辆的产生和消失行为显得更加自然.但是,连接线与实际路段的衔接点仍被视为交叉口,需要进一步处理.
方法5 支路近似
为方便微观仿真建模,并保持宏观模型和微观模型间的一致性,本文在回顾以上方法优缺点基础上,提出了“支路近似”的转换方法,如图2(d)所示,其实现流程如下:
Step 1 将连接线与质心断开,断开处生成一个新的车流产生消失点(如质心只衔接一条连接线,该步可省略);
Step 2 将连接线与真实路段的衔接点近似处理为支线,增加规则禁止直行车流;
Step 3 删除原有的质心和连接线,用新的车流产生消失点和支线更新路网结构.
路网结构更新后,由路段链表示的车辆路径亦同步更新.
事实上,在规划模型中,将质心与物理路网衔接起来的连接线在出行产生和消失过程中起着重要的作用,不能简单删除,因此,在本方法中将这些连接线近似为连接小区和主要道路间的支路.
图3(a)给出了一个典型交通小区及周边道路的示意图,图3(b)是在此基础上建立的规划模型网络,其中O为该小区的质心,OA、OB、OC和OD是将质心连接到物理路网的连接线.从图中可以看到,这些连接线基本上就是从路网中的支线近似而来.按照本文提出的方法,该区域被转换为如图3(c)所示的微观路网模型,质心O不再存在,原连接线的位置自动生成支路A′、A、B′B、C′C和D′D,车辆的产生和消失在支路的尽端点A′、B′、C′和D′发生.
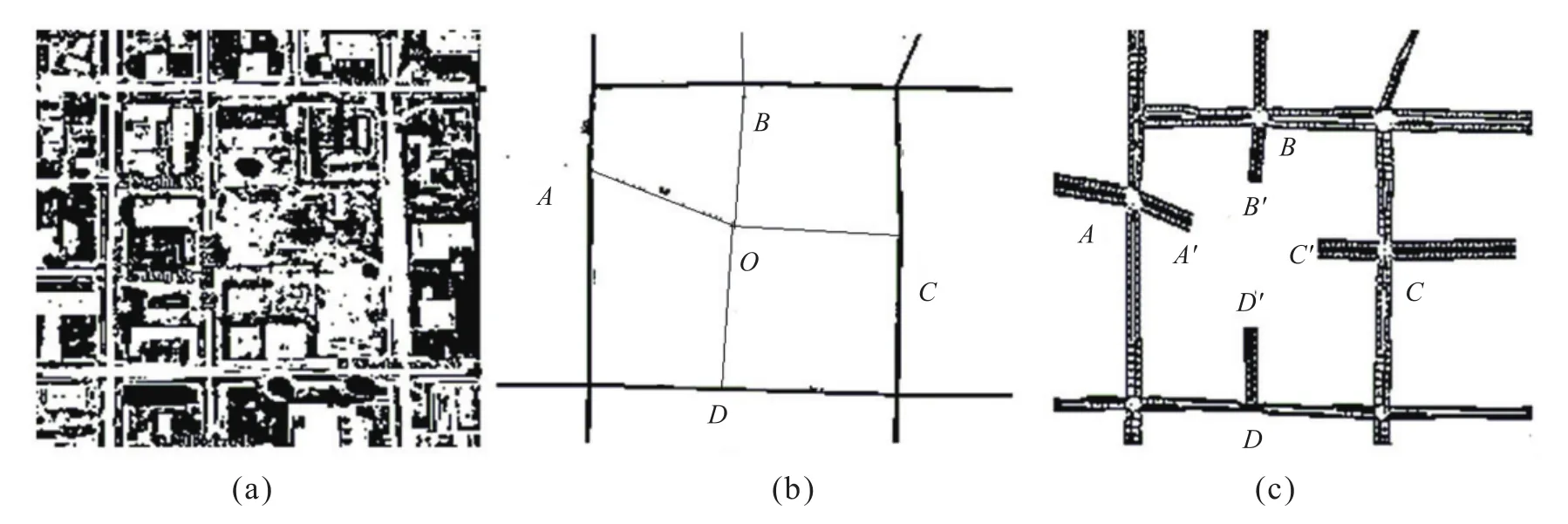
图3 支路近似处理示意图Fig.3 Approximation of connectors
3.3 局部地区车辆数据的重置
微观模型所需要的OD矩阵、路径流和路口转向流数据在与宏观模型保持一致性的前提下按以下步骤生成.
(1)符号说明.
K——车辆集;
KB——经过或产生、消失于局部地区的车辆集;
k——车辆索引,k∈K;
L——路段集;
LB——局部地区边界的路段集;
Ls——局部地区的路段集;
i,——路段索引;
f(i),t(i)——路段i起始和终止点;
v(k)——第k辆经过的路段链;
Z——TAZ集;
ZB——局部地区的TAZ集;
p,q——TAZ索引;
(p,q)——TAZ p到q的OD;
o(k)——第k辆车的起始TAZ;
d(k)——第k辆车的终到TAZ;
t(p,q)——OD(p,q)间的流量;
r(p,q)——OD(p,q)间第r路径上的流量;
m(i,j)——路段i到j的流量.
(2)生成流程.
Step 1 选择局部区域内的TAZ,并在边界处生成新的TAZ.
对于每个线段i∈L,如果该线段两端点均在局部区域内,则将该线段放入LS;
对于每个p∈Z,如果所有的连接线均在LS内,则将p放入ZB;
对于每个线段i∈L,如果只有一个端点位于局部区域内,则将该线段放入LB;
对于每个跨边界的线段i∈LB,如果该线段是连接线,则将该连接线所属的TAZ放入ZB,如果该线段是实际路段,则产生一个新的TAZ并放入ZB.
Step 2 删除质心、生成支路和新的车辆产生/消失点.
对于每个TAZp∈ZB,删除质心、生成支路和新的车辆产生/消失点,更新局部区域路网.
Step 3 扫描车辆,保留局部区域相关车辆并更新路径.
对于每个车辆k∈K,其路径中的任意一段i∈v(k)满足i∈LS∪LB,则将k放入KB,并更新路径v(k)及起始TAZ:p(k)和q(k).
Step 4 生成路径流量.
初始化任意路径流量r(p,q)为0,对每辆局部区域相关的车辆k∈KS,其路径v(k)对应的流量增加1,即r(p,q)=r(p,q)+1
Step 5 生成OD流量.
初始化任意OD流量t(p,q)为0,对每辆局部区域相关的车辆k∈KS,对应的OD流量增加1,即t(p,q)=t(p,q)+1
Step 6 生成转向流量.
初始化所有转向流量m(i,j)为0,对每辆局部区域相关的车辆k∈KS,对其路径中每辆各相邻路段i∈v(k),j∈v(k),对应的转向流量增加1,即m(i,j)=m(i,j)+1
4 模型标定
微观模型的标定从车流量和路网两个层面进行.这里以TransCAD产生的流量为例进行标定.相同的路网结构和OD矩阵下,采用BPR函数的DTALite配流结果与TransCAD配流结果的回归分析如图4所示,y=0.983 3x,R2=0.846 1,显示两套数据具有较好的一致性.

图4 TransCAD和DTALite配流效果回归分析图Fig.4 Regression analysis of link volumes of Trans CAD and DTA Lite
关于微观模型中交叉口的车道和转向逻辑的生成,软件包可根据路段和交叉口的宏观属性自动生成默认方案,同时提供交互式界面供用户修改,以保证与真实交叉口几何形状、控制方式及配时方案等属性的一致.事实上,在自动生成的默认方案上,用户改动的工作量非常小.
5 案例分析
选取美国内华达州 Carson城规划模型(TransCAD)中沿Carson大街的一个局部区域,使用本研究所开发的软件包转换为微观仿真模型(VISSIM).模型标定时,交叉口几何形状根据实际情况进行了少量修改.图5(a)和图5(b)分别显示了沿Carson大街的17条路段南北方向微观仿真得到的路段流量与规划模型配流结果的比较,可以看到,表示TransCAD路段流量的折线几乎总是在表示仿真结果的折线之上,这说明宏观配流结果路段流量被高估.

图5 规划模型与仿真模型产生的路段流量比较Fig.5 Comparison of link volumes between planning model and micro-simulation
选择其中一个编号为1300的交叉口进一步分析,表2列出了两种方法得出的各方向车流量及仿真运行中各方向的平均队长和延误时间,图6显示了各条路段上的车流量对比.

表2 编号1300交叉口各方向数据Table 2 Turning volumes at node 1300
通过对比可以看出,该交叉口南北双方向通行能力紧张,配流结果高估了这两个方向的通行能力,其结果分别为1 101辆/小时和1 240辆/小时.而仿真运行结果则显示,两个方向每小时各自只通过了1 011辆和1 139辆车,比配流结果少了约10%.这表明交叉口通过能力被高估是导致配流结果中路段流量偏高的原因之一.

图6 编号1300交叉口衔接路段流量比较Fig.6 Entrance and exit volumes at node 1300
6 研究结论
本文提出了一种基于路径流的多粒度仿真方法,可以方便地将宏观交通模型中的局部路网及车流量转换为微观仿真模型,微观模型在路网、车流量方面与宏观模型保持一致.案例研究验证了该方法的可行性和有效性.研究结果显示,仿真运行中由于较为深入地刻画了交叉口的车辆行为,所获得的路段流量往往低于规划模型中的路段流量,反映出规划模型由于难以深入考虑交叉口的通行能力,往往导致路段流量被高估.本方法目前只考虑了固定配时方案,期望将来多种配时方案的引入和其他功能的不断完善,使该方法在局部区域交通状况研究中发挥更好的作用.
[1]Roberto Horowitzs.Development of integrated meso/ microscale traffic simulation software for testing fault detection and handling in AHS[R].California PATH Research Report,UCB-ITS-PRR-2004-19.
[2]Burghout W,Koutsopoulos H,Andréasson I.Hybrid mesoscopic-microscopic traffic simulation [J]. Transportation Research Record, 2005, 1934: 218-255.
[3]Burghout W,Wahlstedt J.Hybrid traffic simulation with adaptive signal control[J].Transportation Research Record,2007(1999):191-197.
[4]Vilar J C,Torday A,Gerodimos A.Combining mesoscopic and microscopic simulation in an integrated environment as a Hybrid solution [J]. IEEE Intelligent Transportation Systems Magazine,2010,2(3):25-33.
[5]李永树,刘刚,张帅毅.基于GIS的多粒度复杂网络模型[J].西南交通大学学报,2012,47(3):406-412. [LI Y S,LIU G,ZHANG S Y.Multi-granularity complex network model based on GIS[J].Journal of Southwest Jiaotong University,2012,47(3):406-412.]
[6]DTALite home page[EB/OL].https://sites.google. com/site/dtalite/.Accessed July 15,2012.
[7]Zhen(Sean)Qian,Michael Zhang.On centroid connectors in static traffic assignment:Their effects on flow patterns and how to optimize their selections[J].Transportation Research Part B,2012,46(10):1489-1503.
Path-Flow-Based Cross-Resolution Conversions for Simulation Model
DU Peng1,TIAN Zong-zhong2,ZHOU Xue-song3
(1.MOE Key Laboratory for Urban Transportation Complex Systems Theory and Technology, School of Traffic and Transportation,Beijing Jiaotong University,Beijing 100044,China; 2.University of Nevada,Reno,NV 89557,USA;3.University of Utah,Salt Lake City,UT 84112,USA)
Sub-area traffic analysis is one of critically needed capabilities in practical traffic engineering applications.This paper aims to develop a fully automated network conversion and calibration tool to assist engineers easily extract a portion of a macroscopic planning network to construct a consistent sub-area of interest,and then convert it into a detailed model suitable for microscopic simulation.A cross-resolution simulation(CRS)method is adopted in this paper,which allows a rapid extraction of selected sub-areas from a regional planning network with OD matrix,and a lane-based expansion of the network topology,a consistent regeneration of subarea path flow and link volume.This paper integrates the above-mentioned key modeling components into an open-source package and conducts a case study to demonstrate its effectiveness.
traffic engineering;cross-resolution simulation tool;consistent conversion;sub-area analysis; lane-based expansion;connector conversion
U268.6
A
U268.6
A
1009-6744(2013)02-0027-07
2013-01-28
2013-02-22录用日期:2013-02-27
国家自然科学基金重点项目(71131001);国家基础研究计划项目(2012CB725406).
杜鹏(1974-),男,河南焦作人,讲师.
*通讯作者:pdu@bjtu.edu.cn
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
环球飞行(2018年7期)2018-06-27
中国公路(2017年11期)2017-07-31
中国公路(2017年7期)2017-07-24
中国公路(2017年10期)2017-07-21
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
航天器工程(2014年5期)2014-03-11