
轮组式爬楼机器人的设计与实现
2013-08-23 08:34李正中张青松董培武
制造业自动化 2013年17期
李正中,张青松,邓 翱,卢 阳,董培武
LI Zheng-zhong, ZHANG Qing-song, DENG Ao, LU Yang, DONG Pei-wu
(重庆科技学院 自动化系,重庆 401331)
1 爬楼机器人结构
现有轮式机器人具有较好的水平移动能力,但其越障性能较差,难以满足现场工作的复杂环境要求。为了使爬楼机器人能自主探知障碍,并调整运动状态,其硬件系统应包括以下功能模块:主控模块、驱动模块、障碍检测模块、电源模块等。爬楼机器人控制系统结构图如图1所示。本系统以STC89C52单片机为控制核心,通过红外传感器探测爬楼机器人周围有无障碍以及车体离障碍的距离等信息,经CPU处理后产生行进控制信号和爬楼控制信号,分别实现直流电机的行进PWM调速控制和步进电机的爬楼越障控制[1,2]。
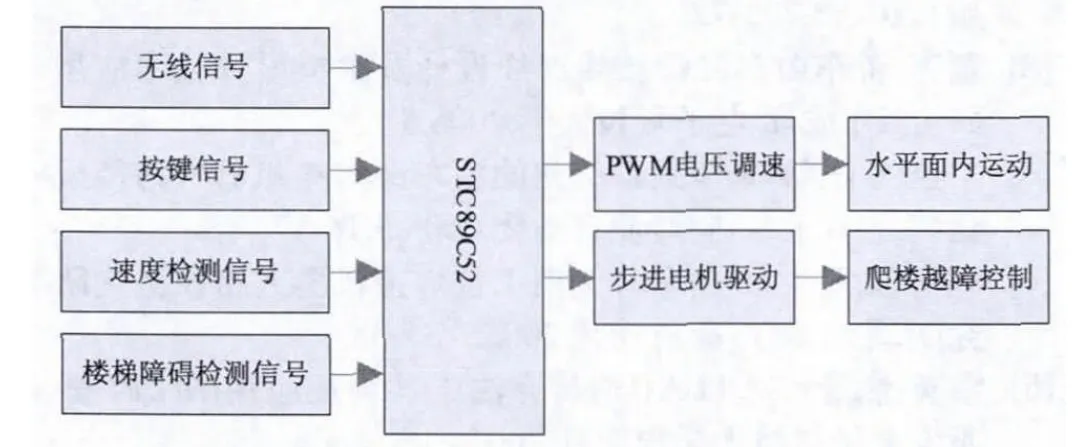
图1 爬楼机器人系统结构图
2 爬楼机器人的硬件设计
2.1 系统结构设计
轮组式爬楼机器人的整体结构由两部份组成,包括位于机器人中问部位由两个轮组驱动的主车架,及轮组机构。主车架由一根车轴及辅助支撑部分组成。机器人的控制部分固定于主车轴四周的支撑机构上,移动时和主轴一起同步旋转。轮组结构由两个双层的”Y”型铝制支架构成,三个等长的轮辐互成120o夹角,如图2所示。主轴和用于越障的步进电机分别位于固定于轮辐的交点的内外侧。车轮的传动部分位于各轮辐的端点处,由大减速比的直流电机直接驱动轮子运动。从而通过轮组的翻转与步进电机的配合实现机器人水平运动及爬楼动作。
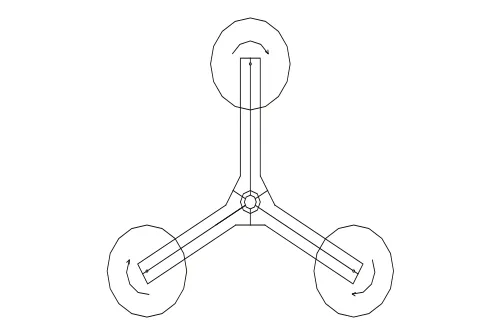
图2 轮组结构示意图
2.2 控制电路设计
该电路采用STC89C52单片机作为控制芯片,各控制部分使用模块化的设计结构。为了提高整个系统的可靠性,其输入部分采用无线输入控制与键盘输入控制两种形式相结合的方式。
2.3 电机驱动电路设计
本机器人轮辐处使用直流减速电机,采用集成芯片L298来驱动左右两组直流减速电机。L298驱动电路原理图如图3所示。其中,控制器产生的两路PWM信号分别接于L298的ENA和ENB引脚,用于调节电机的转速。同时IN1、IN2、IN3、IN4端口是L298逻辑控制端口,通过IN1到IN4电平的高低不同控制OUT1、OUT2电机的动作。

图3 直流电机驱动电路图
为了增大机器人楼爬越障时的力矩,提高其越障的成功率。因此轮组轴心处采用步进电机实现爬楼及越障功能。所用步进电机为四相步进电机,采用单极性直流电源供电。对步进电机的各相绕组按合适的时序通电,使步进电机步进转动。通过控制驱动模块ULN2003芯片10~13引脚电平的高低变化,控制CON1输出端口的通电时序来实现步进电机正传、反转和转动角度。步进电机驱动器原理图如图4所示。
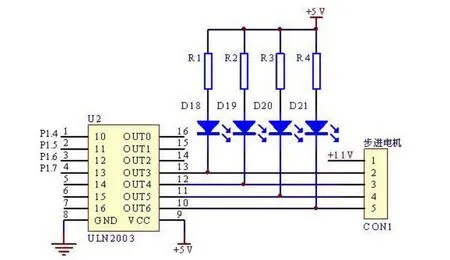
图4 步进电机驱动电路图
2.4 无线控制电路设计
爬楼机器人运动过程中可接受按键信号和无线信号,用以控制直流、步进电机正反转,实现机器人在水平面的直线、转弯等运动以及爬楼越障等动作。该无线信号控制模块采用NRF24L01模块,该模块可工作于2.4 GHz~2.5 GHz ISM频段,内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,其中输出功率和通信频道可通过程序进行配置。无线控制模块接线图如图5所示。
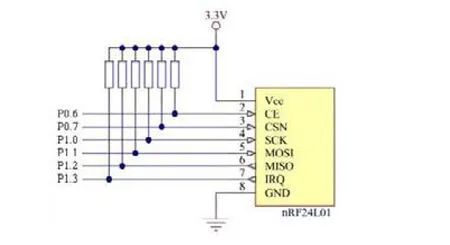
图5 无线控制电路图
2.5 传感器电路
楼梯检测采用红外测距传感器模块,用以实现机器人自主检测障碍、翻越障碍的能力。红外测距模块利用红外对管发射与接收红外线,判断机器人与障碍物之间的间距,为机器人下一步的运动方式提供依据[3,4]。采用霍尔传感器可实现测速功能,将检测到的数据传送到单片机经校正算法处理后输出校正信号。为了减少传感器之间的相互干扰,传感器的打开与关闭用处理器控制,确保不出现两个以上传感器同时打开的情况,消除相互干扰。红外测距及测速电路接线图如图6所示。

图6 测距及测速电路图
2.6 电源电路设计
电源的设计采用了电池组和电压转换电路来实现不同元器件对电压的要求。处理器、传感器、运放处理电路、电机驱动芯片供电均采用5V供电,而对于电机则直接用可充电锂电池组供电,电机两端最大电压可以达到11V,在电机的承受范围内,并且能够提高电机的最大转速。电源部分的电路如图7所示。
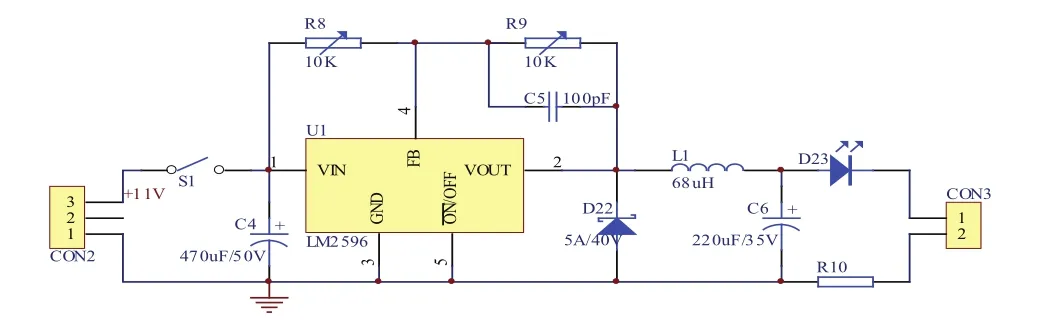
图7 电源模块
3 爬楼机器人的软件设计
根据爬楼机器人运动轨迹和控制要求,系统的控制程序要包括控制主程序、楼梯检测子程序和爬楼子程序等。主程序流程图如图8所示。运动控制主程序完成运动过程处理、数据信息采集与处理,楼梯检测子程序通过红外测距系统实现楼梯的识别,并调用爬楼子程序完成机器人的爬楼运行过程,其流程图如图9所示。
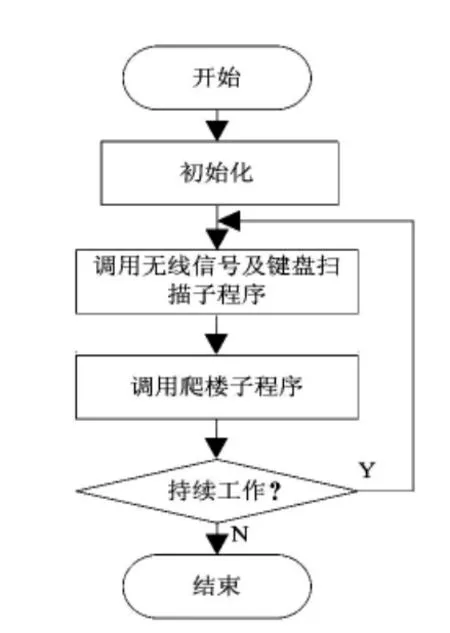
图8 控制系统主程序
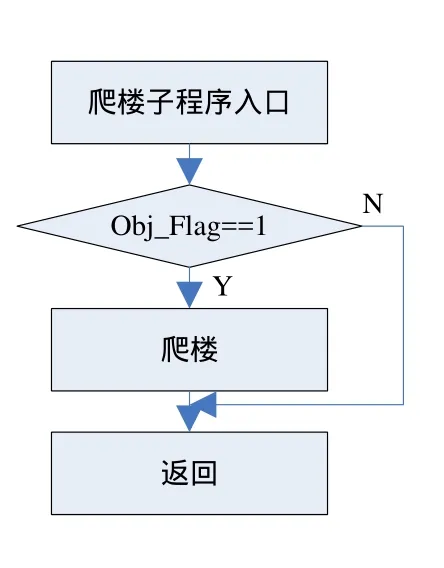
图9 爬楼控制子程序
4 结束语
完成设计之后,对爬楼机器人进行了整体测试和实验,结果显示基本达到预期效果。在机器人正常行驶过程中,固定在Y型支架顶端的直流电动机在PWM技术控制下实现机器人的变速行走。若前方有楼梯则控制固定在Y型支架中心轴上的步进电机,使Y型支架旋转一个角度,从而实现了机器人的爬楼运行。同时这种结构模式也能实现机器人翻越各种类型障碍物,适合在各种不规则区域行走。具有较强的实际应用价值。
[1]李菊叶.小型机器人避障的设计与实现[J].北华大学学报(自然科学版),2012.13(2).
[2]殷春武.主从履带复合式机器人越障研究[J].计算机工程,2012.38(23).
[3]雷艳敏,朱齐丹,等.基于激光测距仪的障碍物检测的仿真研究[J].计算机工程与设计,2012.33(2).
[4]丁伟,李海波.一种移动机器人避障与追踪技术研究[J].制造业自动化,2012.34.
猜你喜欢
起重运输机械(2022年11期)2022-06-29
中国自行车(2018年9期)2018-10-13
中国自行车(2018年7期)2018-08-14
中国自行车(2018年7期)2018-08-14
大众摄影(2018年7期)2018-07-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
