无源检测环境下无人机执行任务的对策研究
2013-09-02 06:24周乃恩
指挥控制与仿真 2013年1期
吴 洋,周乃恩
(中国航天动力技术研究院,北京 100074)
随着隐身、干扰技术的发展,无人机设计和载荷应用使得常规雷达极大地制约了对无人机的检测,越来越多的国家开始研究和使用更加新型的雷达体制,以对抗无人机带来的不对称性。无源雷达[1]属被动雷达体制,由于其本身不辐射电磁波,不会以电子侦察的方式被发现,无人机载荷无法对其进行有效干扰,一旦无人机飞入无源检测环境中执行任务,其被发现和被摧毁的概率会急剧增加。美国的洛克希德·马丁公司多年前就向美国空军提供了被称为“沉默哨兵”[2]的无源雷达系统,它能在不被敌方察觉的情况下准确探测出微小或隐身目标的方位,是目前世界上最先进的反隐身雷达。如何提高在无源检测环境中无人机的生存概率已经成为亟需解决的问题。
1 无源雷达照射源类型
无源雷达常用的照射源包括敌方雷达发射波、模拟电视信号、广播、GSM、GPS、数字电视信号[6]等。实现无源检测时可以根据使用需求和信号处理能力选择相应的照射源。通过分析各照射源的优缺点,可以确定无人机总体设计时反检测的方向。
1.1 敌方雷达发射波
通过电子侦察的方法可确定敌方雷达的工作频率和信号类型,当敌方雷达开机时,可以用其发射信号作为照射源参考信号来进行目标检测。其优点是使用敌方雷达作为照射源,无需考虑照射源被摧毁的问题。但是由于当前侦察技术的发展,具有辐射的设备在战时开机均十分谨慎,己方无源雷达的使用会受到敌方雷达开关机的限制,同时由于多数雷达使用变频发射信号,侦察难度也很大。
1.2 模拟电视(广播)信号
模拟电视信号和广播的信号类型相似,两者均为民用照射源,不会有开关机时长的问题,并且两者均为窄带信号,所需信号处理量较小。信号处理难度小,易于实现。但模拟电视(广播)信号的发射功率较低,雷达作用距离较近,并且由于多使用窄带信号,其距离分辨率也相对较低。
1.3 GSM 和 GPS
GSM和GPS信号广泛存在于生活空间中,基站架设量较大,不会受到照射源位置的限制[3]。因此,可以选择使用移动式无源雷达,就近选择基站点完成无源检测。但为方便使用,通信的基站多架设在楼宇之间,地杂波和多径反射影响大,受到算法限制,GSM和GPS信号的对消增益较小,严重影响检测能力。
1.4 数字电视信号
数字电视信号作为民用照射源,不存在开关机时长问题,较宽的信号带宽提供较高的距离分辨率,发射功率约在1000W至3000W,能够作用于上百千米,同时,数字电视发射塔多为城市最高建筑之一,受到地杂波和多径反射影响较小,因此数字电视信号是无源检测中的一种理想照射源,但信号带宽较宽要求较高的基带采样率,会给信号处理引入很大的数据量,使雷达不易完成实时处理。本文针对数字电视信号照射源研究如何提高无源检测环境中的无人机生存概率。
2 战场无人机反检测策略
目前无人机对抗无源检测环境,主要通过减小机体各方向的散射截面以减小被检测概率,并未展开关于无人机在无源检测环境中反检测策略的研究,有关战场上无人机反检测方法的分析和研究应该从信号源头、己方保护和无源检测中的缺陷等多方面展开。
2.1 照射源失效
本文描述的几种照射源均为常用的照射源类型,在战争前期需要重点关注此类照射源的工作情况,以数字电视照射源为例,全球使用的数字电视标准包括中国国家标准、美国国家标准、欧洲标准三类,其信号的中心频率和信号发生形式均可查询,在战争前期或决定使用无人机执行战区任务之前,需要通过侦察打击或者单频网干扰等方法实现照射源的失效[4]。
2.2 提高己方雷达复杂度
针对可选择敌方雷达作为照射源的情况,在战争中需要提高己方雷达复杂程度,包括对雷达的变频和雷达发射的信号形式进行变换,增大己方雷达被捕获的难度,以减小和消除己方雷达被用作照射源的概率,同时在战争中需要重点关注战区内可能被用作照射源的民用设施,防止被敌方利用。由此减小敌方使用无源雷达的可能性,提高无人机出勤的生存能力[5]。
2.3 发展隐身技术
作用距离是雷达的重要性能指标之一,它决定了雷达能在多远的距离上发现目标。作用距离的大小取决于雷达本身的性能,其中涉及发射系统、接收系统、天线等分机的参数,同时又和目标性质及环境因素有关。这里所说的目标性质,为目标的散射截面积(RCS)。常规雷达作用方程如下:

其中,Rmax为雷达作用最大距离,Pt表示雷达发射功率,G为雷达天线增益,λ表示所用波长,Simin为最小可检测信号功率,σ为目标的散射截面积。方程表明作用距离Rmax和雷达参数及目标特性间的关系,Rmax与成正比,所以通过隐身技术进一步减小无人机的散射截面积,可有效地减小雷达的探测距离。
2.4 提高无人机飞行速度和进行不规则运动
雷达探测时会遇到目标运用异常运动状态实施突防的情况,在无源检测中的形式多表现为目标徙动现象。徙动是由于目标的速度特性和加速度特性使得在雷达信号处理在进行相参积累[6]时出现目标能量跨越多个参考单元格而导致可积累的目标能量分散的现象。雷达检测的中间结果可以表示为时间—频率—幅度的三维函数,即互模糊函数[7],其中时间维和频率维是以距离分辨率和多普勒频率分辨率为单元格进行划分的。当无人机飞行径向速度增加到一定值时,目标的能量就会分散在多个距离单元格,同理当无人机的飞行径向加速度增加到一定值,目标的能量会分散在多个多普勒频率单元格内,这样就会使无人机被检测的信噪比大幅度降低,无人机的被检测概率减小。
3 数字电视信号无源检测环境下的分析
在雷达系统一定的情况下,雷达的探测范围和雷达对目标的发现概率为雷达系统的重要参数指标。数字电视信号的无源检测雷达隶属于双(多)基地雷达,信号为受调制和编码的连续波,根据连续波雷达和双(多)基地雷达的原理,分析无人机在数字电视信号无源检测环境下对照射源的识别、减小探测距离和减小被发现概率的情况。
3.1 数字电视信号照射源的识别[8]
数字电视信号的帧头形式、调制方法、编解码过程等均可以通过现行的数字电视标准查询,以国标数字电视为例,根据载波形式可以分为单载波信号和多载波信号;根据 PN帧头结构可以分 PN420、PN595、PN945等,PN帧头是识别数字电视信号的重要标志,以国标PN595信号为例,在接收端按照同步采样率(7.56MHz)进行采样即可以真实地反映出数字电视的信号帧结构,如图1所示。
采集后的数字信号包含其帧体的相位信息,通过比较帧头部分各点的相位结果,即可确定出信号的形式,PN420和PN945的判断方式相同。
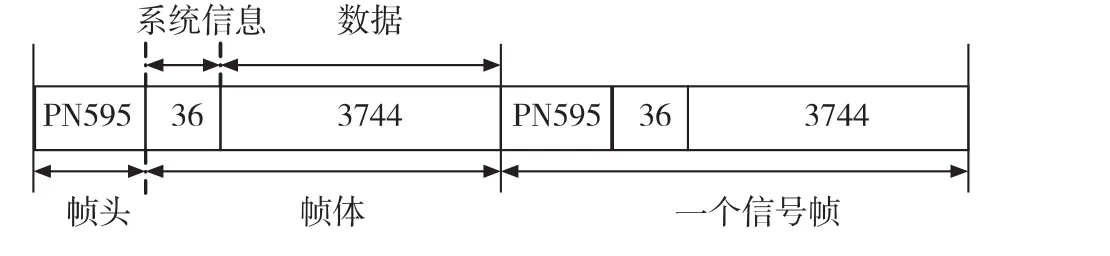
图1 国标数字电视PN595信号帧结构
信号发射功率可根据覆盖范围的要求进行调节,不能作为区分不同形式数字电视信号的依据,但由于数字电视的民用特点,可根据城市规模推算出信号发射的功率范围,以确定无源检测雷达可能的作用距离。
3.2 无人机的目标散射特点[9]
相比于非隐身有人机,无人机的目标散射截面积较小,但是这一特点并非由隐身技术实现,而是由无人机本身体积较小决定的,这就导致了无人机的目标散射截面积不可控。无人机无法对发射和接收分离的雷达体制进行有效地干扰,这样要求无人机需要在满足载荷重量要求的情况下尽可能地减小体积,同时可以参考有人机的一些物理隐身技术,在满足气动布局的情况下尽量减少大拐角的外形结构设计。
3.3 利用目标徙动现象减小被发现概率
积累过程中需要考虑到目标速度和加速度的影响[10]。假设无源雷达的双基地配置如图2所示。设初始时刻目标位于O点,目标沿双基地角平分线匀加速运动,速度为v0,加速度为 a,t时刻运动到O'点。RT0和RT分别为初始时刻和t时刻目标距发射站的距离,RR0和RR分别为初始时刻和t时刻目标距接收站的距离,β0为初始时刻的双基地角,D为基线距离。
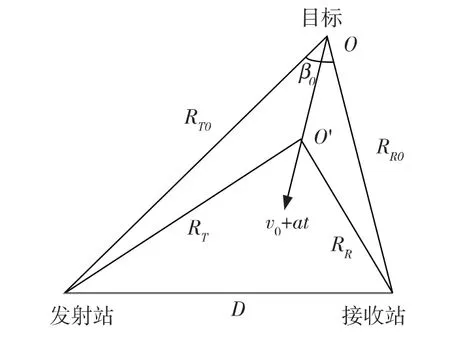
图2 无源雷达工作原理示意图
按照图2中的几何关系,余弦定理可得,t时刻目标到发射站和接收站之间的距离可以分别表示为
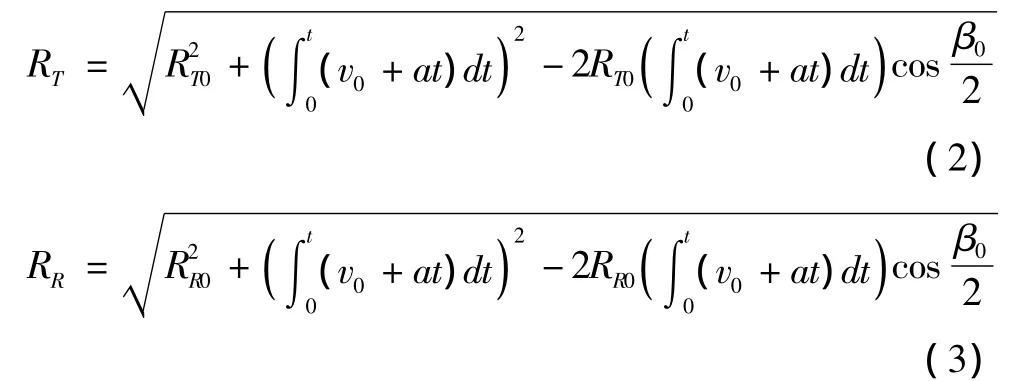
利用式(2)和式(3)可得双基地雷达的距离和为
则目标回波相对于直达波的时延τ与距离和的关系为
双基地雷达中的多普勒频率为

将式(4)代入式(6),可得
对式(5)和式(7)在t=0处进行泰勒展开,并忽略二次及以上项,可知
分别定义:

则回波可表示为

其中,A0为幅度常数,x(t)为照射源发射的信号,τ0、aτ、fd0和 af分别满足:

由式(12)可以看出,由于aτ和af的存在,回波的时延和多普勒频率不再固定不变,而会随着时间变化,即为距离徙动和多普勒频率徙动[11]。徙动的程度与积累时间成正比,同时也与目标的速度、加速度和双基地角等因素有关,其中距离徙动主要由速度引起,而多普勒频率徙动主要由加速度引起。
数字电视信号无源雷达是一种连续波雷达,信号处理过程包括前端接收机、AD采集、对消、相参积累、恒虚警检测,航迹显示等,其中相参积累是针对微小目标检测而进行的一种迭代处理方式,其实质是参考信号和回波信号进行二维相关计算,希望通过在积累时间内参考信号和回波信号的目标相关性和噪声的非相关性而增大检测的信噪比,以便有效地提取出目标信息。相参积累过程涉及到的信号延时和积累时间引出了距离维单元和多普勒维单元的概念,而在两维上都有可能会出现目标跨越多个单元而导致目标能量分散的情况,这样目标的徙动现象就分为距离维徙动和多普勒维徙动。速度和加速度引起的目标徙动与信噪比的关系分别如图3和图4所示。
图3 积累增益随目标运动速度的变化
图4 积累增益随目标运动加速度的变化
3.4 一个实例说明利用目标徙动的方法
上文中简单介绍了目标徙动对信噪比的影响,这里通过一个实例来具体说明速度和加速度的选择依据。参考某数字电视信号无源检测雷达系统指标进行实例分析,假设数字电视信号载波频率设为600MHz,信号带宽为8MHz,接收机基带采样率10MHz,参考信号和回波信号延时为0.1ms,相参积累时间为400ms。
3.4.1 利用距离徙动确定无人机所需航速
根据实例中参考信号和回波的延时为0.1ms,并已知电磁波在空间中的传输速度约为光速,单基地雷达测距公式:

其中,L表示在t时间内的目标距离,C为光速,取t=0.1ms,可以得到距离维单元分辨率为15m,而系统积累时间为400ms,若目标在400ms内跨越15m,则表明目标会跨越多个单元格,可计算出当目标速度大于V时,有

此时,目标的能量不能集中在一个距离单元格。根据线性关系可以得到,当V=70m/s时目标就会跨越2个单元格,使目标能量下降一半,信噪比降低约3dB,同理当速度越来越高时,目标会跨越更多的距离单元格,造成信噪比进一步下降。由此可以选择无人机在检测到无源雷达环境后,及时改变速度造成距离徙动现象,以减小被检测信噪比,实现突防。
3.4.2 利用多普勒徙动确定无人机加速度
根据实例中数字电视信号的载波频率为600MHz可以推算出信号的波长为0.5m,系统的积累时间为400ms可以推算出多普勒维单元分辨率为2.5Hz,多普勒频率和速度的对应关系:

其中Fd表示多普勒频率,λ表示信号波长,将Fd=2.5Hz带入关系式,可以得到速度分辨率为0.635m/s。当无人机处于无源检测环境中做加速度绝对值大于0.635m/s的不规则运动时,会在多普勒频率单元上形成跨越多个单元格的现象,当目标跨越2个单元格,目标检测的能量会下降一半,信噪比下降约3dB。由此可以选择无人机在检测到无源雷达环境后,及时针对径向方向做高加速高减速运动,减小被检测信噪比,以减小被发现概率。
3.4.3 目标徙动对检测结果的影响效果
使用实际数据对目标出现徙动时无源检测效果进行描述。无源雷达系统的积累时间为400ms,基带采样率为10MHz,无人机距离无源雷达接收站约10km,径向速度为-96.71m/s。如果目标未出现徙动现象时,在时延-多普勒频移-能量的三维图上应该呈现出板钉状的尖锐形,表示能量集中在某一参考单元内,但是上述状态下目标已出现徙动现象,如图5所示。
图5 出现目标徙动时的互模糊函数结果三维图
图6所示为能量维的平面情况。
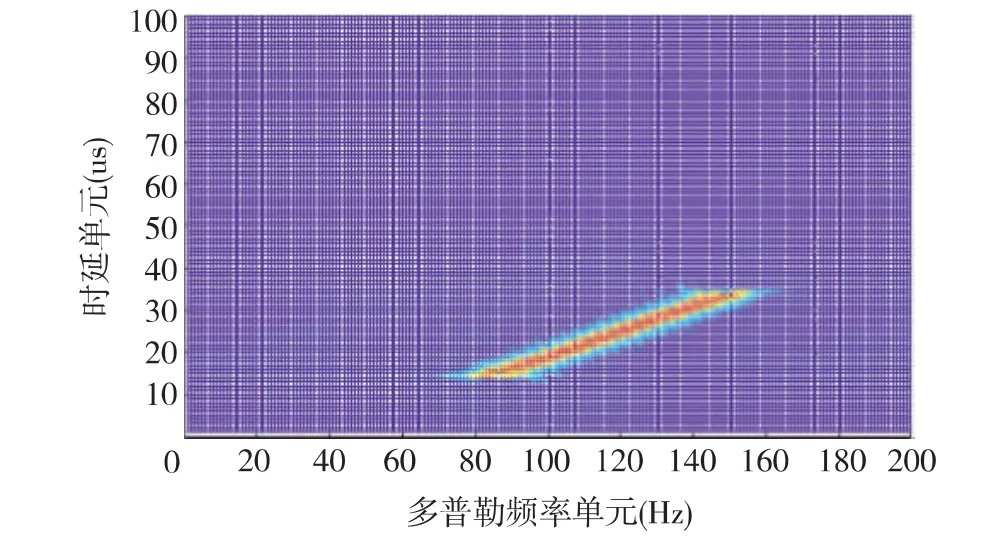
图6 出现目标徙动时的互模糊函数结果(能量维截面)
在实际设计中要求检测信噪比达到约20dB,而通过图6可以看出,目标的能量被分散在了多个单元格内,截取互模糊函数的频率维结果进行目标信噪比的估算,如图7所示,相参积累结果的信噪比为16.9558dB,说明无法满足信噪比的检测要求,故在当前无源检测环境中,无人机达到约100m/s的径向速度时即可实现突防。
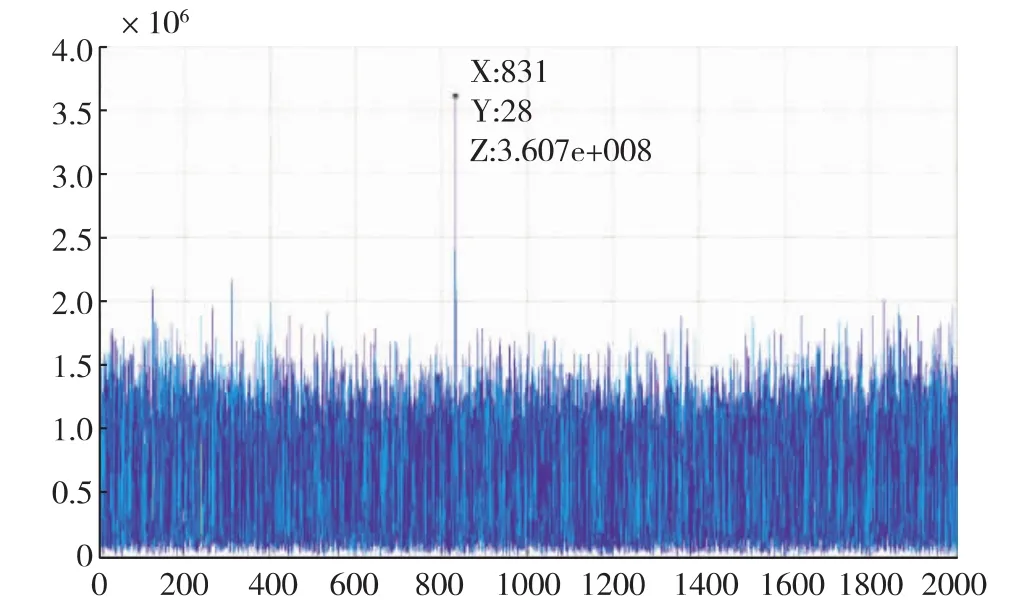
图7 出现目标徙动的频率维结果
3.4.4 利用徙动的依据——处理能力受限
由于徙动现象的影响,雷达的信号处理过程已经考虑到运用距离维徙动补偿和多普勒维徙动补偿技术[4-5],该类徙动补偿技术在算法上效果明显,但由于要时刻进行目标运动状态跟踪和目标轨迹的预测,使得各种徙动补偿方法实际中运算量很大,目前处理器无法实现所有情况的徙动补偿,或者无法完成有效的实时处理,由此可根据调研处理器运算能力,以及依据无人机的飞航技术,选择在无源检测环境下无人机合适的飞行状态以提高任务执行时的生存概率。
4 结束语
对于高科技下日益复杂的战时环境,无人机的适应能力和生存能力将受到非常严峻的挑战。本文从无源检测环境的照射源和无源检测信号处理难点出发,说明了战前对照射源类型的识别方法和针对无源环境战区执行任务时无人机的飞行状态。论文着重对数字电视信号无源检测环境进行了分析和研究,提出了通过照射源识别、利用目标徙动现象突防的无人机反检测策略,使用实际数据对该策略验证效果明显,可以用作无人机总体设计指导和战时无人机出勤航迹规划。
[1]孙仲康,周一宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996.
[2]Nordwall B.D.‘Silent Sentry’-A New Type of Radar[J].Aviation Week&Space Technology,1998.
[3]杨运甫,陶然,王越,等.一种GSM无源雷达信号模型及模糊函数性质研究[J].电子学报,2005,33(6):1048-1052.
[4]单涛.基于电视辐射源的运动目标检测算法研究[D].北京:北京理工大学,2004.
[5]何友,关键,彭应宁,等.雷达自动检测与恒虚警处理[M].北京:清华大学出版社,1999.
[6]王俊,张守宏,保铮.基于外照射的无源相干雷达系统及其关键技术问题[J].电波科学学报,2005,20(3)281-285.
[7]郭 强,陶 然.电视信号的模拟及其模糊函数[J].兵工学报,2004,25(6):702-707.
[8]黄雅琳.基于电视信号的双基地雷达信号处理技术的探讨[J].无线电通信技术,2002,28(2):57-59.
[9]Griffiths H D,Baker C J.Passive coherent location radar systems.Part1:Performance predication[J].IEEE,Proc.Radar Sonar Navig,2005,152(3):153-159.
[10]张南.高速加速运动微弱目标检测技术研究[D].北京:北京理工大学,2009.
[11]保铮.雷达信号的长时间积累[C].南京:第七届全国雷达学术年会,1999:9-15.
猜你喜欢
电脑爱好者(2021年12期)2021-06-22
电脑爱好者(2021年8期)2021-04-21
空间科学学报(2020年3期)2020-07-24
数学大王·趣味逻辑(2020年6期)2020-06-22
数学大王·趣味逻辑(2020年5期)2020-06-19
电子制作(2019年12期)2019-07-16
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
电子技术与软件工程(2015年6期)2015-04-20
中国信息化·学术版(2013年5期)2013-10-09