针对隐身突防的海上编队雷达网建模与仿真*
2013-09-02 06:24李照顺
指挥控制与仿真 2013年1期
童 剑,李照顺,柳 强,董 蒙
(1.海军指挥学院浦口分院,江苏 南京 211800;2.解放军94736部队,江苏 南京 210042)
在近几次的局部战争中,隐身飞机以其优良的反探测性发挥了重大作用[1],对防空系统构成了巨大的威胁。隐身技术是特征控制技术,通过控制信号特征使得目标探测更为困难,其本质是从不同领域用相应的方法来减少目标散射截面积,从而达到目标隐身的目的。然而,隐身飞机并非全向隐身,其雷达反射面积(RCS)在空域、频域及极化域等方面均呈现出不一致的特性。目前的雷达反隐身手段主要有频域反隐身[2-3]和空域反隐身[4-5]。前者利用了隐身飞机不能在所有频段都具有良好隐身性能的缺陷,通过提高或改变雷达自身性能达到反隐身的目的;后者利用了隐身飞机RCS值的有向性,采用双/多基地雷达、气球载或机载等空基雷达、雷达组网等空间技术来反隐身。
而雷达组网抗击隐身目标是现代防空雷达的一个重要发展方向。从公开的文献可以看出,目前雷达组网反隐身优化布站方法研究主要针对陆基雷达[4-6],而目前针对海上编队雷达网反隐身还停留在技术可行性研究上[7]。本文在文献[8]所建立的相关模型的基础上,根据文献[6]总结的典型机型RCS特性,建立了雷达对隐身飞机的探测模型,针对隐身飞机的隐身有向性,建立了海上编队雷达网反隐身优化模型,通过对编队雷达网面临隐身飞机在有无干扰情况下从空中和低空突防时对抗过程的仿真,得出了较优的舰艇编队的部署阵位,实现海上编队雷达组网反隐身的目的。
1 海上编队雷达网反隐身功能仿真
本文讨论的海上编队雷达网反隐身功能仿真主要模拟舰艇编队雷达网面临隐身飞机在有/无干扰情况下空中和低空突防的对抗过程。海上编队雷达网反隐身优化仿真功能框图如图1所示,其主要由实体模型和认知模型两部分组成。海上编队雷达网反隐身优化仿真过程是:实体模型中编队指挥舰上的雷达网数据处理机通过通信电台接收舰艇编队各平台雷达模型的探测数据以及平台的相关信息进行处理,激发认知模型;认知模型对有无隐身飞机突防进行判断,如果没有,调用雷达网初始化优化模型对编队中各平台的初始位置进行求解,结果传给仿真控制模型,如果有,调用雷达网反隐身优化模型进行求解,如果有敌方干扰,继续调用干扰条件下的雷达网反隐身优化模型进行求解,把结果传给仿真控制模型;认知模型中的仿真控制模型通过参数设置可以进行人工干预,参数设置包括仿真的暂停、继续、停止以及隐身机平台模型和干扰机平台模型的激活和停用状态,仿真控制模型中的进程控制模块一方面将接收的优化结果进行结果显示,另一方面根据参数设置决定是否停止仿真或将优化结果和相关命令反馈给编队中各平台模型,继续下一步仿真。
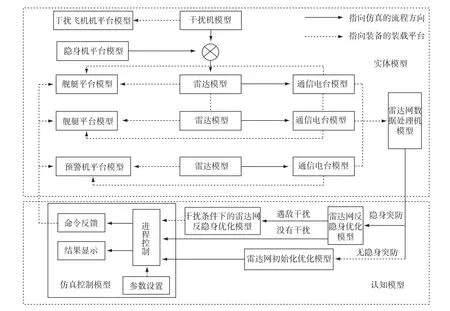
图1 海上编队雷达网反隐身优化仿真功能框图
2 海上编队雷达组网反隐身实体模型
实体模型包括平台模型和装备模型。平台模型包括舰艇平台模型和固定翼飞机平台模型,固定翼飞机平台模型又包括预警机平台模型、干扰飞机平台模型和隐身机平台模型。装备模型包括单雷达模型、干扰机模型、通信电台模型和数据处理机模型。舰艇平台模型装载雷达、通信电台、数据处理机等装备模型;预警机装载雷达、通信电台等装备模型,干扰飞机装载干扰机模型。平台模型是实体模型中最基本的模型,它涉及当前的地理位置、速度、方向等状态信息。
装备模型中通信电台模型负责舰艇之间的探测数据交互,雷达网数据处理机负责各雷达模型探测的数据收集和处理并激发认知模型。干扰机模型根据干扰方程建立,当Prj/Pri≥Ka时,雷达被干扰,Prj为雷达接收的干扰机功率,Pri为雷达接收到的目标信号功率,Ka为压制系数[8]。
本文中的雷达模型主要是在文献[8]建立的雷达模型的基础上针对隐身飞机平台的探测进行了修改,其隐身目标的雷达截面积σ不仅与雷达的自身参数有关,而且还随着隐身目标的入侵方向的改变而改变。雷达对隐身目标探测模型示意图如图2所示。
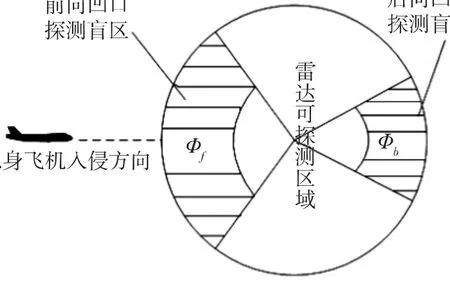
图2 雷达对隐身目标探测模型示意图
图2中,φf,φb分别为隐身机鼻锥和尾锥方向盲区夹角。隐身目标的雷达截面积σ的计算公式如下:

式中,fi为第i部舰载雷达的工作频率;γi为第i部舰载雷达的极化方式;φ隐为隐身机的入侵方向;φ探为雷达探测方向;B为为隐身目标RCS特性查表函数[6]。
3 海上编队雷达组网反隐身认知模型
海上编队雷达组网反隐身认知模型主要包括海上舰艇编队雷达网优化模型和仿真控制模型。雷达网优化模型包括雷达网对常规目标的初始化优化模型、雷达网反隐身优化模型和干扰条件下的雷达网反隐身优化模型。雷达网对常规目标的初始化优化模型与有无干扰情况下雷达网反隐身优化模型的主要区别是后者在前者的基础上要对隐身目标入侵方向从0°至360°方向进行遍历,保证雷达网无缝连接,内部无盲区,以此作为一个约束条件在雷达网优化的数学求解模型中体现。仿真控制模型一方面是为了读取仿真结果数据,另一方面是通过人机交互对下一步仿真进行干预。
3.1 海上编队雷达组网反隐身优化数学模型
海上编队雷达组网反隐身优化数学模型的建立需要一个雷达网反隐身性能的指标。这里主要考虑雷达网的探测性能,结合海上舰艇的编队原则[9],将警戒区域覆盖率作为雷达网反隐身的评估指标。
由于海上舰艇编队面临着空中和低空/超低空的多重威胁,各艘舰艇既有对空警戒雷达,又有对海警戒雷达。根据编队雷达网的探测数据,以编队指挥舰为核心划分对空警戒区域和对海警戒区域。从探测角度考虑,舰艇编队在保证队形和间距符合编队原则的基础上,要获得尽可能大的对空警戒区域和对海警戒区域,并且要求雷达网内部满足无缝连接,不存在盲区。
上述几方面的要求不一定能同时满足。这里采用文献[8]和文献[10]提出的用加权合成的方法将上述的多目标函数优化问题转化为单目标函数优化问题。设N部雷达组成的雷达网,对海警戒区域覆盖率为fs,对空警戒区域覆盖率为fa,要选择一种最优的方案,使fs和fa都趋向最大。利用加权合成的编队雷达网反隐身探测效能优化目标函数如下:

式中,ω∈[0,1],为选取的权系数。
此目标函数有3个约束条件:①舰艇编队需保持自己的阵形;②舰艇编队雷达网需满足无缝连接,内部无盲区;③舰艇间距要受到火力协调和指挥通信的影响限制。
设编队指挥舰的位置为(x0,y0),编队其它各平台机动后的位置为(xi,yi),i=2,3,4,…。
针对约束条件(1),需满足:

式中,θi为第i个编队平台相对于编队指挥舰的固定舷角。
针对约束条件(2),利用网格覆盖的连续性判断函数来保证要求。判断函数的判决过程是:对警戒区域划分的网格逐行进行扫描,判断每行中被雷达网覆盖的网格是否连续,如果不连续,扫描停止,并返回盲区区域的位置。对于海上编队雷达网对常规目标优化模型求解的结果,只要判断函数扫描结束后判断出内部无盲区,其优化过程就可以结束。而由于隐身飞机的飞行航向的不可预知,雷达网反隐身优化模型需对隐身目标从0°至360°的入侵方向形成的不同雷达网都要进行无盲区判断,直到无论隐身飞行航向如何,雷达网内部都不存在盲区才可结束。
针对约束条件(3),需满足:

式中,Rmaxi和Rmini为第i艘舰艇与编队指挥舰之间由于通信和火力协同的距离限制极值。
3.2 海上编队雷达组网反隐身覆盖率计算
根据雷达的距离方程和图2可得出在干扰和隐身条件下,其探测责任区是不规则的。这里采用网格法计算雷达网对空和对海覆盖率。根据文献[11,12]提出的网格计算方法,将对空警戒区域A分为Q×L个小格,计算每一小格中心点距离编队指挥舰的距离,如果该点在海上编队雷达网对空探测范围内,则该小格被雷达网覆盖,则对空警戒区域网格覆盖个数na加1;同理,将要求的对海警戒区域S分为M×N个小格,计算雷达网在对海警戒区域内覆盖的网格个数ns。如图3所示。
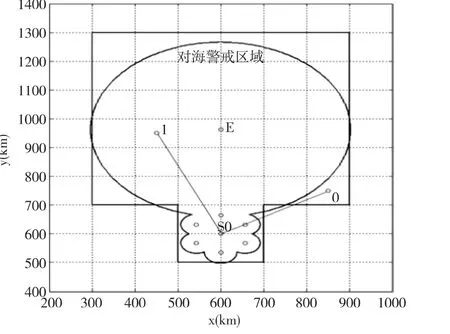
图3 海上编队雷达网对海警戒区域覆盖率计算
由此计算雷达网对海警戒区域覆盖率为

雷达网对空警戒区域覆盖率为

4 仿真试验与结果分析
假设某外军舰艇编队由1艘指挥舰(S0)、2艘驱逐舰(S1、S4)、4 艘护卫舰(S2、S3、S5、S6)和 1 架预警机(E)组成。设编队指挥舰位于(600km,600km),以指挥舰为中心,假设其主要威胁方向为正前方,划分对海警戒区域为一个以指挥舰S0为中心的200km×200km加上一个其前方600km×600km的区域,划分对空警戒区域为一个800km×1200km的区域。编队阵形是以指挥舰艇为中心成环状配置,其中2艘驱逐舰分别位于指挥舰的正前和正后方位,4艘护卫舰均匀分布在指挥舰的左翼和右翼,预警机位于编队的最前端。在RCS为10m2的情况下,各平台雷达探测性能分别为:预警机对空 506km,对海 303km;指挥舰对空381km,对海42km;驱逐舰对空381km,对海37km;护卫舰对空362km,对海36km。根据舰艇编队的编队原则,舰艇之间的间距应在20km~70km之间。海上编队雷达组网反隐身的仿真流程图如图4所示。
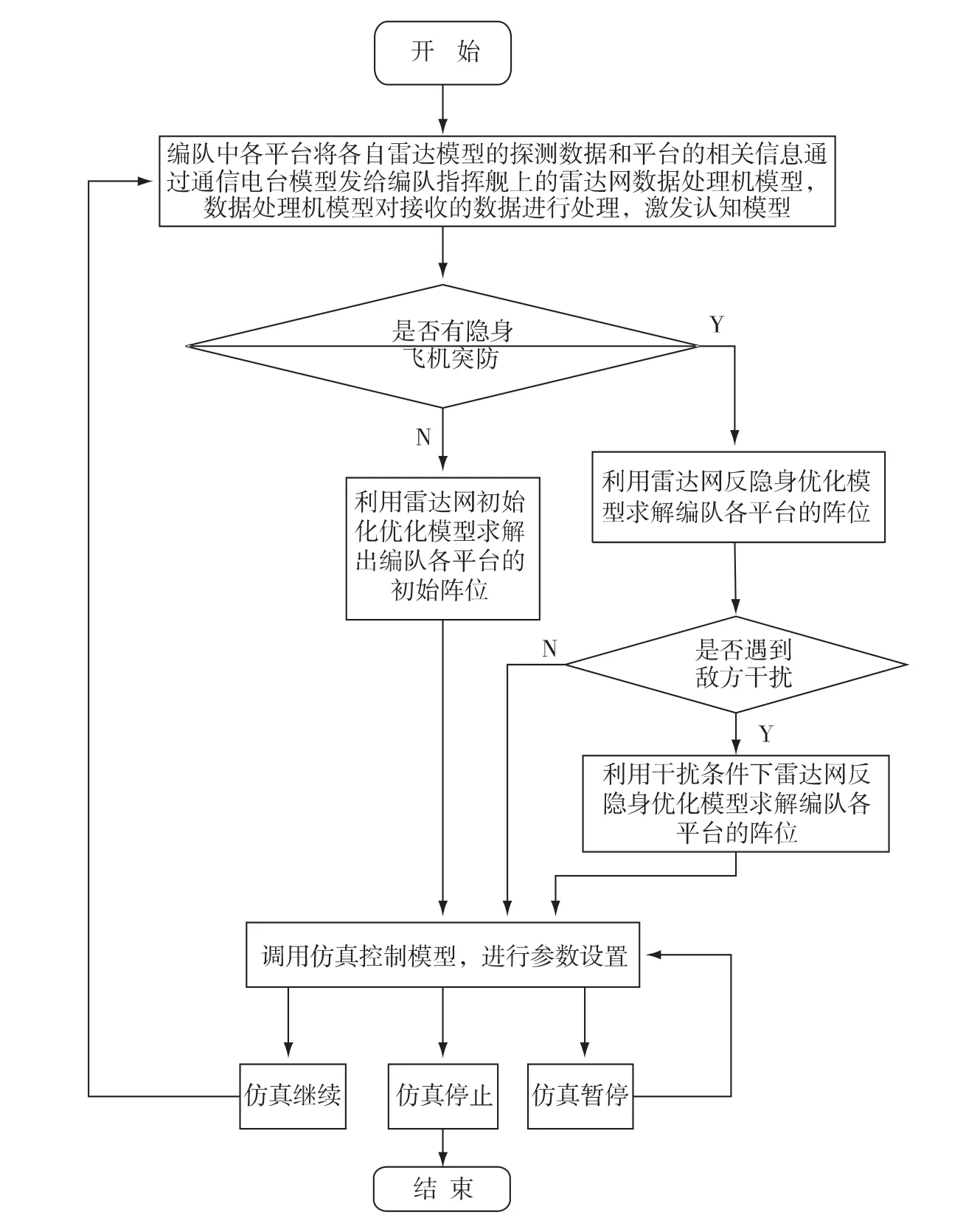
图4 海上编队雷达组网反隐身仿真流程图
取ω=0.5,在无隐身飞机威胁的情况下,得出的编队其它成员的最优阵位为:S1(600km,665km),S2(543.434km, 632.020km), S3 (543.434km,567.980km),S4(600km,535km),S5(656.566km,567.980km),S6(656.566km,632.020km),E(600km,962.799km),编队雷达网部署参见图5,6,7,8。图5 为各雷达对空探测范围图,图6为雷达网对空探测范围图,图7为各雷达对海探测范围图,图8为雷达网对海探测范围图。
仿真场景1:假设有一架F-117A隐身飞机从编队右前方以60°(正北为0°)角向编队突防,利用反隐身优化探测模型解算出编队其它成员的最优阵位为:S1(600km,665km),S2(543.434km,632.020km),S3(543.434km,567.980km),S4(600km,535km),S5(656.566km, 567.980km), S6 (656.566km,632.020km),E(600km,862.798km),编队雷达网部署参见图9-图12。图9为各雷达对空探测范围图,图10为雷达网对空探测范围图,图11为各雷达对海探测范围图,图12为雷达网对海探测范围图。
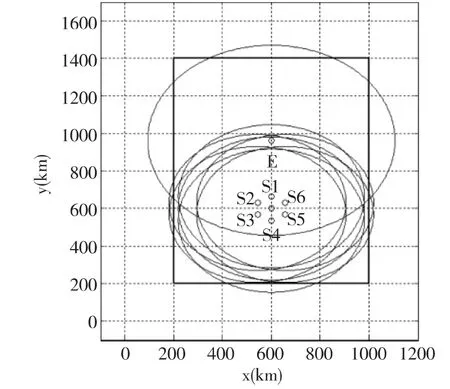
图5 各雷达对空探测范围图
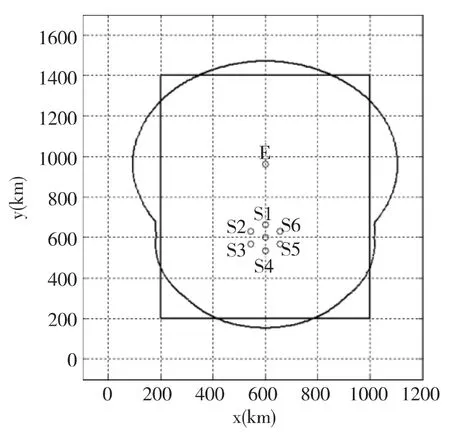
图6 雷达网对空探测范围图
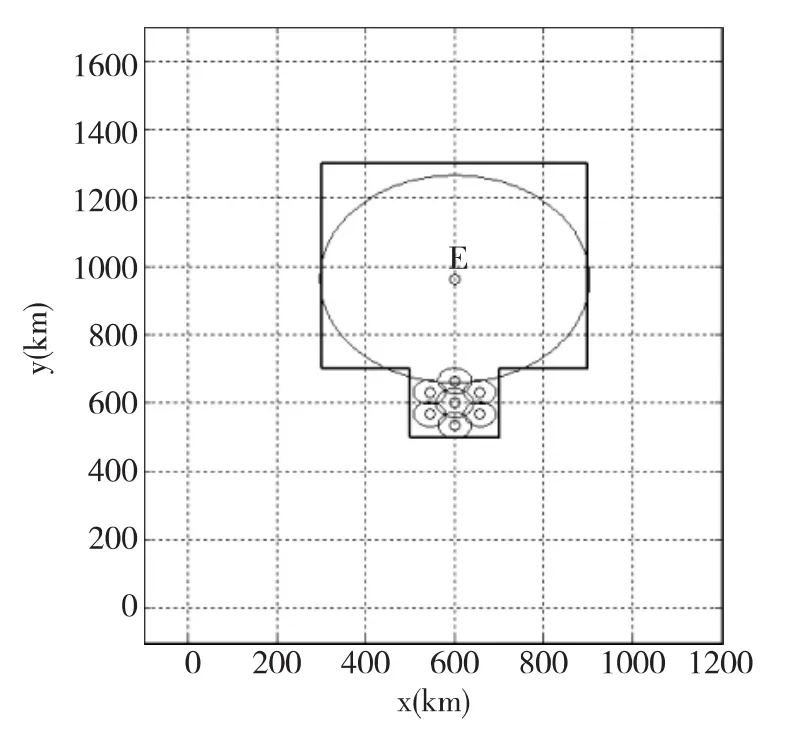
图7 各雷达对海探测范围图
仿真场景2:在场景1的情况下,在位于(600km,1450km)处有一敌方干扰机对我编队雷达进行干扰,利用反隐身优化探测模型解算出编队其它成员的最优阵位 为:S1(600km,644.256km),S2(552.137km,627.094km),S3(552.137km,572.906km),S4(600km,550.505km), S5(647.864km, 572.906km), S6(647.864km,627.094km),E(600km,775.892km),编队雷达网部署参见图13-图16。图13为各雷达对空探测范围图,图14为雷达网对空探测范围图,图15为各雷达对海探测范围图,图16为雷达网对海探测范围图。
图8 雷达网对海探测范围图
图9 各雷达对空探测范围图
图10 雷达网对空探测范围图
图11 各雷达对海探测范围图
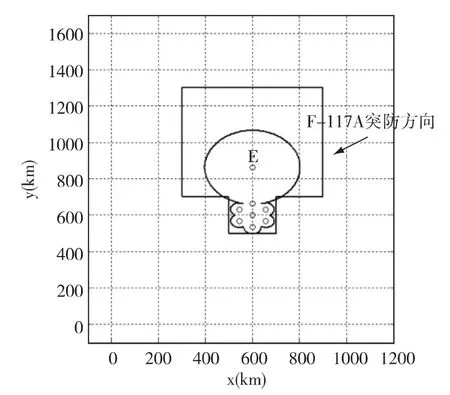
图12 雷达网对海探测范围图
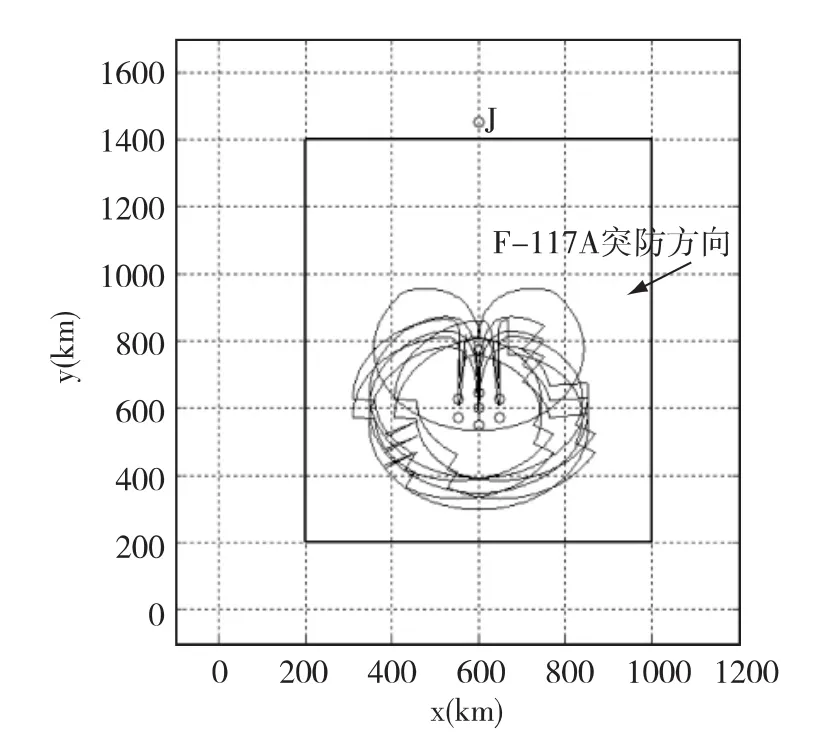
图13 各雷达对空探测范围图
根据式(2)、式(5)和式(6),通过雷达网对常规目标初始化模型的优化,计算出编队雷达网对海警戒区域覆盖率为0.608,对空警戒区域覆盖率为0.939,编队雷达网探测效能为0.773;经过雷达网反隐身优化模型解算后,计算出编队雷达网对海警戒区域覆盖率为0.506,对空警戒区域覆盖率为0.506,编队雷达网探测效能为0.506;而经过干扰情况下雷达网反隐身优化模型解算后,计算出编队雷达网对海警戒区域覆盖率为0.305,对空警戒区域覆盖率为0.357,编队雷达网探测效能为0.331。从以上结果可以得出,雷达网反隐身优化后对海预警区域覆盖率降低了0.102,对空预警区域覆盖率降低了0.433,干扰情况下雷达网反隐身优化后对海预警区域覆盖率又降低了0.201,对空预警区域覆盖率又降低了0.149。预警区域的下降是为了消除盲区去换取较优的警戒区域覆盖率所造成的,从以上数据分析得出,针对隐身目标,对空雷达网的探测区域影响较大,对海雷达网因为受雷达视距限制探测区域影响较小,而针对干扰情况下,对海和对空的雷达网探测区域都受到了很大的影响。以上优化后得到的编队各平台之间的间距是雷达反隐身优化模型根据仿真试验中雷达的参数计算出的编队各平台之间的最大间距,其结果可以为舰艇指挥员规划舰艇阵位时提供参考依据。
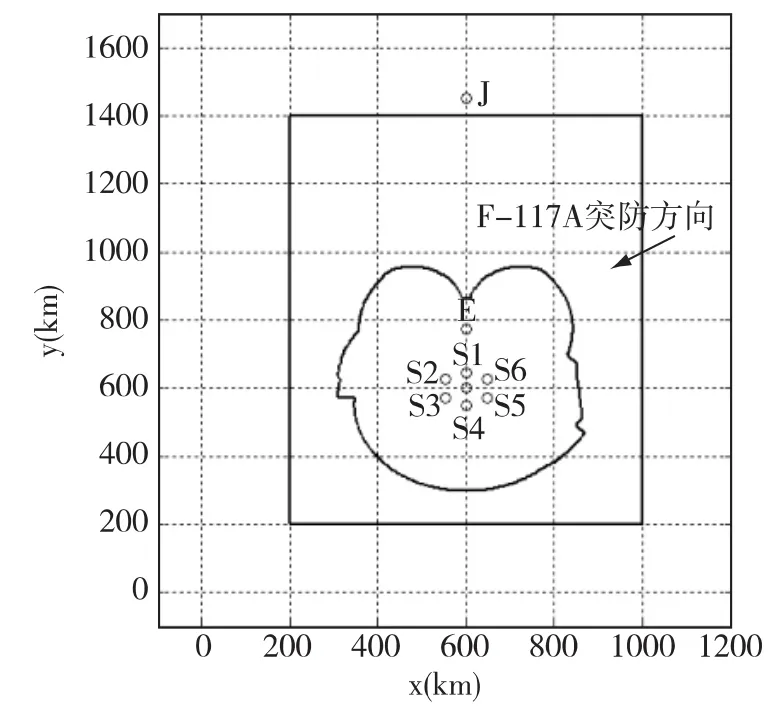
图14 雷达网对空探测范围图
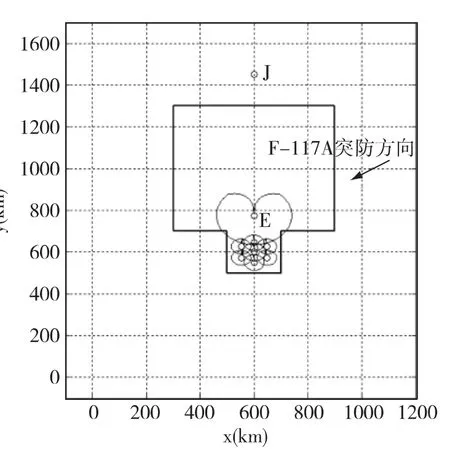
图15 各雷达对海探测范围图
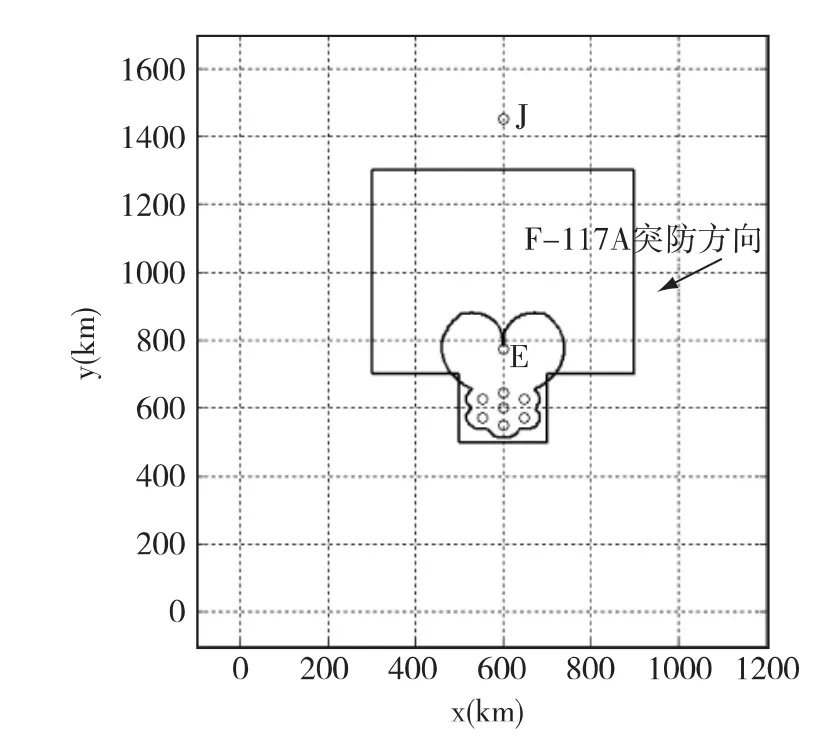
图16 雷达网对海探测范围图
5 结束语
雷达组网是目前抗击隐身目标的最有效的途径之一,雷达网的优化部署问题直接影响着雷达网探测隐身目标的性能[13]。本文建立的海上编队雷达网反隐身优化部署模型经过仿真试验,得到了较优的编队成员部署阵位,进而验证了所建模型的可行性和正确性,并对深入研究海上编队雷达组网“四抗”具有重要意义。但该模型是在理想条件下建立的,在实际应用中还要充分考虑其它制约因素,譬如通信干扰、环境因素、战场态势等,因此,该模型还需继续改进和完善。
[1]朱长征.飞机的隐身技术现状及发展趋势[J].航天电子对抗,2001(6):42-45.
[2]刘发来.雷达隐身与反隐身[J].航空电子技术,1995(4):27-34.
[3]陈永光,李修和,沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006:1-11.
[4]张彬,王韬,吴志文.空域反隐身的雷达优化布站与仿真[J].雷达与对抗,2003(3):5-6.
[5]卢盈齐,祝长英.雷达组网反隐身的一种优化布站方法[J].系统工程理论与实践,2007(6):166-169.
[6]王万磊,李侠,周启明,等.雷达网反隐身优化部署决策模型及算法研究[J].现代雷达,2006,28(11):8-11.
[7]姚磊,姚景顺.编队雷达组网反隐身目标技术研究[J].舰船科学技术,2005,27(1):67-69.
[8]方良,李照顺,刘竹.海上编队雷达网优化部署系统的设计与实现[J].现代防御技术,2011,39(4):149-183.
[9]高东华,俞跃,李伟.舰艇电子对抗战术[M].北京:解放军出版社,2004:130-139.
[10]李雪松,江旭敏.雷达组网技术研究[J].探测与定位,2010(2):9-14.
[11]Xiao-Ling W,Lei S,Jie Y.Swarm Based Sensor Deployment Opimization in Ad Hoc Sensor Networks[C].ICESS,LNCS3820,2005:533-541.
[12]Brian.CarterAn Extensible Model for the Deployment of Non-Isotropic Sensors[C].IEEE Sensors Applications Symposium,2008:12-14.
[13]祝长英,李成海,卢盈齐.雷达组网反隐身的优化布站问题研究[J].电光与控制,2009,16(4):69-71.
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
河北地质(2021年1期)2021-07-21
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
求学·理科版(2016年3期)2016-03-23
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
军事体育学报(2014年3期)2014-02-27