
齿轮精整机械手轨迹规划与运动仿真研究
2013-09-12 09:10崔龙飞孟庆爱
组合机床与自动化加工技术 2013年8期
崔龙飞,张 龙,孟庆爱
(南京理工大学机械工程学院,南京 210094)
0 引言
齿轮精整机械手的基本要求是要有快速的抓取过程和高精度的定位性能,将齿轮精准的放到冲压设备上,倘若稍有偏差齿轮就会被冲坏,为了提高机械手的工作效率,必须对其进行轨迹规划。机器人的轨迹规划是机器人学中的一个非常重要的研究领域。机械手的轨迹规划是使机械手在规定时间内,按一定的速度及加速度,从初始状态移动到某个规定的目标状态,并使所规定的代价函数(通常为表征时间或能量等条件的函数)最小化。轨迹规划的目标是其运行的快速、准确和平稳[l]。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。采取ADAMS进行辅助分析,可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的[2]。
基于以上叙述,首先建立了机器人的各连杆D-H坐标系,确定连杆参数,然后在Matlab环境下,运用Robotics Toolbox工具箱,编制程序语句,完成轨迹规划,反解各关节运动参数。然后根据该数据在ADAMS中生成样条函数,用ADAMS/View中的Controls Toolkits建立控制系统,通过PID环节进行控制,控制对象是作用在每个关节单分量力矩,驱动机械手虚拟样机模型运动,并在后处理模块中观测分析仿真结果。
1 精整机械手的结构参数
精整机械手完成作业过程的动作可分为定位——抓取——移动——放置。为提高所设计的机械手的可扩展性,选用了具有多个旋转关节的关节型机器人作为设计和分析的机构[3]。
齿轮精整过程中,要确定初始齿轮位置和放置位置,利用关节型机械手的三个自由度来确定;同时为了便于抓取,要求末端执行器在运行过程中保持水平,在腕关节增加一个旋转自由度,故四自由度机械手即可满足作业要求。精整机械手的总体结构如图1,它由腰部、大臂、小臂和手腕通过旋转关节串联而成,一端固定在基座上,另一端自由安装末端执行器。

图1 精整机械手总体结构示意图
1.1 建立各构件的D-H坐标系
机械手D-H坐标系如图2所示,为了简化矩阵计算,取机械手基准坐标系与腰关节坐标系重合,其余各关节坐标系原点建立在各自关节中心。

图2 机械手D-H坐标系
1.2 各连杆的结构参数和运动变量
各关节的运动变量都是绕着各自坐标系Z轴的转角,将机构的结构参数和运动变量列于下表1,其中 d=126mm,l0=38mm,l1=180mm,l2=136mm,l3=105mm。

连杆 αi-1/(°) ai-1/mm di/mm θi/(°)1 90 l0 d θ1 2 0 l1 0 θ2 3 0 l2 0 θ3 4 0 l3 0 θ4
2 Matlab轨迹规划
精整机械手轨迹规划在关节空间内进行,这是由于在关节空间中直接用运动时的受控量进行规划,实时性较好,并且不会出现奇异性问题,使得关节空间的轨迹规划得到广泛的应用。该机械手选择在关节空间中进行轨迹规划,需要给定机器人在起始点、终止点的位姿,同时关节轨迹还需要满足一组约束条件,即规划函数必须保证关节变量及其前两阶导数的连续性,使规划的关节规划平稳光滑,同时应尽量减少额外的运动如游移和抖振[4-5]。
2.1 机械手轨迹规划的实现
机器人轨迹规划是根据机器人要完成的任务而设计机器人各关节的运动规律。轨迹规划主要有两种方案[3]:点到点运动(PTP,point-to-point motion)的轨迹规划;连续路径运动(CP,continuous-path motion)的轨迹规划。对于连续路径运动。不仅要规定机械手的起始点和终止点,还要指明两点间的若干中间点(称路径点),必须沿着特定的路径运动。
针对设计的精整机械手,采用的是点到点运动的轨迹规划。根据运动学分析,设机械手的初始位姿为A,终止位姿为B,按照预定的工作任务,要求机械手从起A点到B点的运动,它们之间不存在任何的中间点,并且对于运动的路径也没有设置要求,因此,机械手轨迹规划可视为PTP规划。
为了研究多关节机器人运动轨迹的平滑性和连续性,增加仿真效果的直观性,可以利用一种规划函数对机器人的多个关节运动轨迹同时进行仿真,即采用 MATLAB Robotic Toolbox[6]对机械手多关节轨迹进行仿真,该工具箱提供了机器人研究中的很多重要函数,包括机器人运动学、动力学、轨迹规划等[7]。该工具箱可以对机器人进行图形仿真,并分析真实机器人控制时的实验数据结果,具有很强的直观性。
2.2 机械手MATLAB数值模型的构建
要建立机械手模型,首先我们要构建各个关节模型,利用构建好的各关节之间关系来完成整个机械手的构建。用Robotics Toolbox工具箱中的link和robot函数来建立精整机械手的机器人对象。
根据机械手D-H坐标系,可以构建机械手的模型,设机械手名称为Picking Robot,其程序和模型如下:
2.3 机械手运动轨迹仿真
根据前面的分析,采用关节空间进行轨迹规划,关节空间法是以关节角度的函数来描述机械手的轨迹,进行轨迹规划。关节空间法不必在直角坐标系中描述两个路径点之间的路径形状,计算比较容易。规划的主要任务是选择合理的多项式函数或其它线性函数进行插补运算,使关节运动平滑、稳定,始终保持在关节运动容许的范围内。其优点是计算量小效率高,仅受关节速度及加速度的限制,不会发生机构的奇异性问题,特别适合机械手末端运动不要求规定路径的、进入空间行程大范围内快速移动的轨迹段。
利用robotics toolbox工具箱中提供的关节空间轨迹规划函数jtraj进行仿真,jtraj函数采用的是7次多项式插值法,默认初始和终止角速度、角加速度均为0[7]。机械手从起点到终点所用的时间2s,根据运动学分析的初始位姿和终止位姿,得到机械手各个关节的角位移曲线,其图如图3所示。

图3 关节角位移变化曲线
从图3各个关节角度变化曲线可以看出各关节能平稳地从初态运动到末态,看出机械手各关节运行过程平滑,完全符合轨迹规划的要求,可以充分说明本次轨迹规划的合理性。通过仿真,我们可以得到末端执行器在X、Y、Z轴方向的位移变化曲线图见图4。
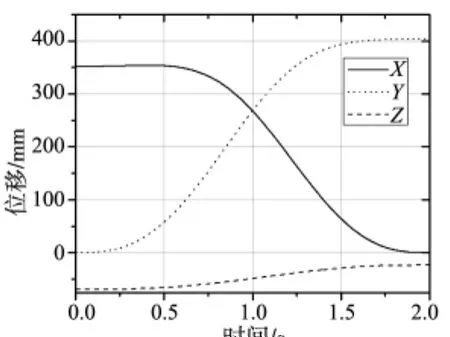
图4 末端执行器夹持中心位移曲线
从图中可以看出,末端执行器运动位置曲线整体比较平滑,其中Z轴方向为末端执行器上升的方向,先上升到要求位置,然后再平缓运动到终止位置,而末端执行器一直处于水平方向,无额外的运动如游移和抖振,完全符合实际情况,说明轨迹规划的合理性和可行性。
3 机械手ADAMS运动仿真
在ADAMS/View中建立齿轮精整机械手的虚拟样机模型,用Controls Toolkits建立控制系统,通过PID环节进行控制,控制对象是作用在每个关节单分量力矩,以驱动虚拟样机运动,建模与仿真的流程如图5所示。
(1)建立机械手的模型,在两个关节处分别添加单分量力矩,然后先将数值设为0。
(2)将MATLAB计算出的角位移数据以Spline形式导入ADAMS。建立文本文档保存在ADAMS工作目录下,文档中的存有两列数据:第一列为时间,第二列为关节位移。导入关节1~4的角位移数据创建了SPLINE1~SPLINE4。
(3)建立控制系统的输入环节。调用Spline函数中的Akima拟合(AKISPL)将输入角位移样条曲线SPLINE1~SPLINE4建立输入环节1~4,作为各关节的跟踪目标,同样的方法,单击输入环节按钮,在弹出的函数构造器中选择Displacement项,然后在其下面的函数列表中,单击Angle about z,测量各关节的实际运动中的转角,再建立输入环节5~8。
(4)创建比较环节。单击控制环节工具包中的比较环节按钮,将预期跟踪角位移与实际测得的关节角位移建立比较环节1~4。
(5)创建PID环节。单击控制环节工具包中的PID按钮,将比较环节1~4与实际测得的角位移输入环节1~4建立PID环节1~4。
(6)将单分量力矩参数化。双击单分量力矩的图标,将各关节力矩大小与PID环节1~4相关联,实现力矩参数化。
(7)PID控制环节的参数调节。进入后处理模块中,在后处理模块中将关节1~4的输入角位移和输出角位移进行比较,然后修改PID环节的参数,直至两条曲线重合为止。

图5 建模与仿真流程图
至此建立起了机械手在ADAMS环境下的完整仿真模型,然后进行仿真时间和仿真总步数或仿真步长的定义,Matlab中仿真时间为2s,仿真时间应一致,即取2s,总步数取2000。
3.1 机械手轨迹验证
ADAMS仿真结果可以根据需要调用,输出所需的数据曲线和动画,从而能够清晰地看到机械手搬运齿轮过程中的运动规律,可以将构件运动中的速度突变,抖动等一系列问题反映出来,交互地进行结构参数的调整与改进[8]。使用 ADAMS/View中的Review/Create Trace Spline功能,创建被夹持的齿轮质心运动轨迹曲线,如图6所示,然后测量轨迹终点位置,与预期位置一致,说明轨迹规划的正确性。
3.2 运动仿真结果分析
ADAMS/View提供了一些常用的默认输出,这些输出在进行仿真分析以后,会自动产生,同时允许采用测量和指定输出的方式自定义一些特殊的仿真输出[9]。另外ADAMS还有专门的仿真后处理(Post-processor)模块,运行过仿真计算以后,就可以计算处理运动副上的位移、速度、加速度、作用力和作用力矩等数据,以及与构件固连的Marker点的位移速度和加速度等数据。

图6 机械手仿真运动轨迹
利用Measure工具和后处理程序测量机器人各关节的运动学和动力学参数以及分析末端执行器的速度的稳定性,将测得的各关节的转矩、角速度、角加速度数据绘图如图7所示。

图7 关节角速度、角加速度曲线
(1)各个关节的角速度、角加速度关节的角速度直接关系到整个机械系统工作的合理性,各个关节的运动角速度变化对机械手的定位精度有较大的影响,故在机械手的运动轨迹优化时要着重考虑降低运动速度的突变。
从图7可以看出各个关节的角速度、角加速度变化较平滑,初始值和终止值均为0,机械手控制中,关节角速度、角加速度是重要的运动参量,虽然关节角速度曲线启动时存在微小的波动,但曲线总体上都比较平滑,符合规划要求。
(2)各个关节的力矩
当机械手进行运动时,机械手的各个关节需要有相应的伺服驱动来输入扭矩,同时,扭矩也是机械手控制系统设计中的重要参量。精整机械手的各关节扭矩仿真曲线如图8所示。
从仿真曲线可以看出,当精整机械手抓取到齿轮的情况下,各关节的扭矩时间曲线平滑无突变,表明机械手在运行过程中平稳,无振动。比较各关节扭矩曲线,肩关节扭矩最大,因为其处于机械手始端,悬臂最长,因此要求提供的扭矩最大。仿真得到的这些驱动力矩与运动参数是各驱动器、减速器、传感器选型与匹配的基本参考依据同时,各个关节处的实际驱动力矩都需大于仿真过程的力矩峰值,才能满足驱动要求。

图8 关节驱动扭矩仿真曲线
(3)被夹持齿轮质心的速度和加速度
在整个仿真过程中,齿轮质心速度和加速度也是轨迹规划中重要的参考量,为了保证运动的可靠性,将齿轮质心的速度和加速度仿真结果进行分析,其仿真图形如图9所示。

图9 齿轮质心的速度、加速度曲线
从图中可以看出,齿轮质心的速度和加速度变化曲线整体比较平滑,表明末端执行器在运动平稳连续,无抖振,符合机械手运动性能和平稳性。
4 结束语
介绍了机械手运动轨迹规划的概念意义,运用MATLAB强大的数学解算功能在关节空间坐标系下进行轨迹规划,解算关节运动参数,在ADAMS中建立机械手仿真模型,利用解算得到的数据,用Controls Toolkits建立控制系统,通过PID环节控制各关节力矩,进行运动仿真研究,对末端执行器的运动轨迹进行验证,利用Measure工具和后处理程序测量机器人各关节的运动参数、驱动力矩和被夹持齿轮质心的速度和加速度,清晰的反映出各关节运动与驱动力矩之间的关系,为各驱动器、减速器、传感器选型与匹配提供基本参考依据,为下一步设计控制律提供了理论依据,获得了系统整体动态性能,达到了减少研究人员的计算量和提高工作效率的目的。
[1]张兴国.环保压缩机装配机器人控制技术及轨迹规划研究[D].南京:南京理工大学,2002.
[2]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
[3]蔡自兴.机器人学(第二版)[M].北京:清华大学出版社,2009.
[4]K.Kiguchi,T.Fukuda.Intelligent Position/Force Controller for Industrial Robot Manipulators Application of Fuzzy Neural Networks[J].IEEE Transactions on Industrial Electronics,1997,44(6):753 -761.
[5]J.J.Craig,P.Hsu,S.S.Sastry.Adaptive Control of Mechanical Manipulators[J].Int.J.Robotics Research,1987,6(2):16-18.
[6]王幼民.机械臂关节空间B样条曲线轨迹规划[J].安徽机电学院学报,2000,15(2):21 -26.
[7]谢斌,蔡自兴.基于Matlab Robotics Toolbox的机器人学仿真实验教学[J].计算机教育,2010,19(10):140-143.
[8]郭柏林,胡正义.基于ADAMS的搬运机械手轨迹规划与仿真[J].湖北上业大学学报,2007,22(4):37-39.
[9]张海平,孔庆忠,郑海龙,等.基于Pro/E和ADAMS五自由度机械手的运动学分析及仿真[J].机械制造与自动化,2009(2):149-152.
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
内燃机工程(2021年6期)2021-12-10
装备制造技术(2020年4期)2020-12-25
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
电子制作(2019年13期)2020-01-14
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年4期)2017-06-22
山东青年(2016年12期)2017-03-02
