提高炮位侦校雷达定位概率分析
2013-10-21 00:58冯健康
火控雷达技术 2013年4期
李 牧 于 悦 冯健康
(1.西安理工大学 西安 710054;2.总参陕航部驻西安地区军代室 西安 710065;3.西安电子工程研究所 西安 710100;)
0 引言
相控阵体制炮位侦察校射雷达集成了二维电扫描相控阵天线技术、计算机控制技术及全相参脉冲多普勒技术等现代雷达先进技术,技术性能先进、战术性能优良,是地面部队实现快速、准确、侦察、定位敌火炮阵地,完成有效的反击压制、摧毁敌方火炮,取得战斗主动权不可缺少现代化装备[1-3]。
炮位侦校雷达的定位概率是一项重要战术指标,该战术指标设计涉及到雷达时间能量的合理分配、搜索扫描方式、处理方案及外推算法等多个方面。本文从炮位侦校雷达工作原理出发,从雷达的捕获概率、综合检测概率角度,分析了影响雷达定位概率下降的因素,同时简要提出了解决的技术途径和措施。
1 炮位侦校雷达的工作原理[4]
炮位侦校雷达搜索波束以步进方式对雷达前方90°区域从左到右擦着地形上方进行搜索扫描,从而形成一个扇形的电子屏障。一旦弹丸目标穿过电子屏障,雷达就会检测到目标,计算机自动控制雷达波束在发现目标的波束位置上发射确认波束,确认目标是否存在;确认有目标后,计算机控制雷达波束对目标实施离散定时跟踪,从而实现雷达对空间多个弹丸目标跟踪。雷达终端根据跟踪的一段弹道轨迹外推出敌方炮位或我方弹丸炸点坐标,其工作原理示意图见图1。
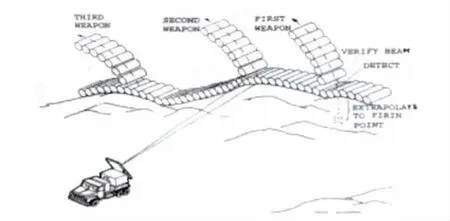
图1 炮位侦校雷达工作原理示意图
2 雷达捕获概率的分析
炮位侦校雷达搜索波束对空间弹丸目标的捕获既与时间维有关又与多普勒频率维有关,一方面雷达搜索波束在搜索扫描过程中,弹丸目标同时从下而上运动(侦察方式)或从上而下运动(校射方式),这样就存在搜索波束是否能可靠与弹丸目标交汇的问题,也就是说取决于雷达搜索波束的帧扫时间是否与弹丸目标穿过搜索波束的时间相匹配。另一方面,即使搜索波束与弹丸目标可靠的交汇,但由于雷达采用MTI(动目标显示)和MTD(动目标检测)处理技术,雷达存在多普勒盲区的问题,若弹丸目标位于雷达多普勒频率盲速区域,雷达也是不可能捕获到弹丸目标。这两个过程对雷达而言是相互独立的,从上面的分析我们可以得出,雷达搜索波束对弹丸目标捕获概率公式可以写成如下:

其中:p(x)为雷达搜索波束对弹丸目标捕获概率;p(t)为雷达搜索波束对弹丸目标时域捕获概率;p(fd)为雷达搜索波束对弹丸目标多普勒域捕获概率。
在炮位雷达工作过程中,雷达对空间弹丸目标对目标的确认和跟踪过程是插入在搜索波束搜索扫描过程中的,这也相当于增加了搜索波束的帧扫时间,那么搜索波束在时域捕获概率:

其中:tv为搜索波束纯搜索扫瞄帧扫时间;td为弹丸目标穿过搜索波束的时间。
弹丸目标的速度比较快,相对雷达的多普勒频率比较大,为了消除雷达盲速往往采用参差脉冲重复频率工作方式,这就存在搜索波束多普勒盲区不同,因此,搜索波束在多普勒维捕获概率大小应当与雷达设计的无盲速范围和搜索波束驻留数目乘积成反比,与雷达在每个搜素波束驻留位置实际多普勒不盲速范围之和成正比,那么搜索波束在多普勒域捕获概率:

其中,tq为确认波束停驻时间;tz为跟踪波束停驻时间;m 为在搜索波束帧扫时间内插入确认的次数;n为在搜索波束帧扫时间内插入跟踪的次数;fdq为雷达设计的无盲速多普勒范围;fdq(i)为第i 个波束位置实际无多普勒盲速频率范围的大小;I 为雷达搜索波束停驻驻留的数目。
3 雷达综合检测概率的分析
对炮位侦校雷达而言,雷达对空间弹丸目标的检测概率应当用综合检测概率衡量,它不仅与雷达对空间弹丸目标所具有的检测概率有关,也与雷达对空间弹丸目标所具有的捕获概率有关,不是雷达具有的检测概率高,综合检测概率就高,也不是雷达具有的捕获概率高综合检测概率就高,因为雷达的检测概率和捕获概率是互为矛盾的。具体的说,雷达综合检测概率应为捕获概率与检测概率的乘积:

其中:pd(x)为雷达综合检测概率;pd0(x)为雷达检测概率。
4 雷达定位概率分析
炮位侦校雷达的定位概率与综合检测概率、弹道的跟踪质量及弹道外推算法等多种条件有关,而雷达对空间弹丸目标综合检测概率是影响雷达定位概率大小的主要因素,下面就炮位侦校雷达综合检测概率对定位概率影响及设计思路作简要分析。
4.1 综合检测概率优化设计
从(4)式可以看出炮位侦校雷达综合检测概率是检测概率和捕获概率的乘积,而检测概率和捕获概率又是矛盾的。追求检测概率高,必然要求信噪比高,也就是波束停驻时间要长,那么从(2)和(3)式可以看出又必然导致捕获概率降低;追求捕获概率高,就要求波束驻留停驻时间要短,必然导致雷达检测概率偏低,因此必须对综合检测概率优化设计。
4.2 捕获概率的优化设计
从(1)式可以看出捕获概率是时域捕获概率和多普勒域捕获概率的乘积,但时域捕获概率和多普勒域捕获概率也是互为矛盾的。从(2)和(3)可以明显的看出随着雷达对弹丸目标跟踪数量增加,雷对弹丸目标的捕获概率将急剧下降;同时当雷达的搜索、确认状态虚警率控制不到位、跟踪虚假目标点数太多,雷达的捕获概率也将受到严重的影响。为了获得满意的雷达捕获概率不能仅考虑时域或频域,要综合分析,例如某炮位侦校雷达在搜扫描过程中,每个搜索波束的波位仅用一个重复周期驻留,而且每个脉冲重复频率仅仅去掉了MTD 处理中的0#滤波器,这样既保证了雷达搜索波束在多普勒维不丢失目标,也保证了搜索波束纯搜索扫瞄帧扫时间短。但由于MTD 是加权处理,因而滤波器变宽,导致临近滤波器的主瓣延伸到零多普勒处,因而雷达的搜索波束虚警率大大提高,从而导致时域捕获概率大大降低。当然也可采用每个搜索波束仅用一个重复周期驻留,而且每个脉冲重复频率MTD 处理可采取较宽杂波抑制凹口,这样可保证时域捕获概率最佳,又抑制搜索波束虚警,但从(3)式可以看出多普勒域捕获概率将会降低。当然也可以每个搜索波束采用多个重复周期驻留,而且每个脉冲重复频率MTD 处理可采取较宽杂波抑制凹口,这样可保证频域捕获概率最佳,又抑制搜索波束虚警,但从(2)式可以看出搜索波束时域捕获概率将下降,因此必须对雷达捕获概率优化设计。
4.3 优化雷达搜索扫描方式
所谓炮位侦校雷达搜索扫描方式是搜索波束采取具体搜索扫描方案,它包括搜索波束从左到右搜索扫描停驻的设置、每个搜索波束停驻的时间及脉冲重复频率等技术参数。炮位侦校雷达的时间和能量是有限的,而搜索波束相对确认和跟踪波束占的比重更大。因此,搜索扫描方式的合理选择是保证雷达捕获概率大小最关键的因素之一。
4.4 搜索虚警率控制
雷达搜索波束纯搜索扫瞄帧扫时间在雷达搜索扫描方式确定之后,该时间是一定的,但搜索波束的检测虚警率超过规定的设计要求,将直接增加雷达的确认过程,从(2)式可看出,导致雷达时域捕获概率降低,从(3)是可以看出,也将导致雷达多普勒域捕获概率降低。特别是炮位侦校雷达对目标确认过程的波束驻留时间往往要大于搜索波束驻留时间,因此,这就要求雷达在保证检测概率前提下,尽可能采取有效的技术措施降低搜索波束虚警率,比如在有干扰的方向,即虚警概率大的区域暂时放弃检测过程或采用区域恒虚警技术等。
4.5 确认虚警率控制
雷达确认过程是对搜索波束发现的目标进行确认,达到确定弹丸目标进一步剔除虚假目标目的。如果确认过程虚警率过高,将增加雷达对虚假目标的跟踪,从(2)和(3)式可以看出将直接导致捕获概率下降。这就要求必须对雷达确认过程进行优化设计,尽可能在保证确认发现概率前提下降低确认虚警率。通常在雷达确认过程中常常采用双门限检测技术,试验证明这种技术措施不够完善,必须利用雷达确认过程充分提取目标相关信息,比如目标回波信号径向速度方向、大小及幅度等信息,然后结合弹丸目标运动特点进一步去伪存真。
4.6 减少虚假目标的跟踪点数
炮位侦校雷达搜索、确认及跟踪过程完全是自动转换的,一旦雷达对虚假目标实施跟踪,如果处理不到位,常常会对虚假目标跟踪点非常多,甚至超过弹丸跟踪点数,从(2)和(3)式可以看出这将大大降低雷达对弹丸目标的捕获概率,消耗雷达时间和能量。这就要求认真分析弹丸目标运动的规律及位置参数变化的规律,采取有效地技术措施及早识别虚假目标,及早放弃对虚假目标的继续跟踪。例如当雷达处于侦察状态时,跟踪弹丸出炮口后的上升段,其弹丸目标相对于雷达而言,距离愈来愈近,速度愈来愈小、俯仰角愈来愈大。而当雷达处于校射状态时,跟踪弹丸即将落地的下降段,其弹丸目标相对于雷达而言,距离愈来愈远,速度愈来愈大、俯仰角愈来愈小。
5 结束语
相控阵体制炮位侦校雷达搜索、确认及跟踪过程完全是自动转换的,时间能量是有限紧张的。本文从概率的角度出发分析了定位概率下降的原因,也提出了一些解决措施,希望会对工程设计有所帮助。
[1]张光义,赵玉洁.相控阵雷达系统[M].北京:电子工业出版社,2006,12.
[2]王晓东,袁桂祁,于周秋.相控阵炮位侦校雷达自适应调度设计[J].现代雷达,2010,32(11) :38-41.
[3]张冠杰,陈曙.炮兵雷达的体系与发展[J].火控雷达技术,2001,30(1) :1-5.
[4]冯健康.相控阵炮位侦校雷达多目标跟踪能力分析[J].火控雷达技术,1994,23(2):14-17.
猜你喜欢
信息通信技术(2022年2期)2022-05-31
小学生必读(中年级版)(2021年12期)2021-12-02
哈尔滨工程大学学报(2021年10期)2021-11-05
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
兵器装备工程学报(2020年3期)2020-04-22
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
弹箭与制导学报(2018年5期)2018-02-21
雷达学报(2017年6期)2017-03-26