基于循环相关的GPS 信号捕获
2013-10-21 00:58罗丁利
火控雷达技术 2013年4期
任 远 罗丁利
(西安电子工程研究所 西安 710100)
0 引言
GPS 是美国在1973 年开始研制的卫星导航与定位系统,具有高精度、全天候、全球覆盖、方便灵活等特点。GPS 信号在传输过程中采用直接序列扩频调制方式,接收机在时间信息提取和导航电文解调之前,需要实现载波和C/A 码的二维同步[1]。载波同步和C/A 码同步一般分为捕获(粗同步)和跟踪(精确同步)两个阶段,且GPS 卫星信号的跟踪需要以信号捕获为前提。在信号跟踪之前,接收机内部复制的载波和C/A 码信号必须与接收信号吻合到一定程度,估算出接收信号的载波多普勒频移和码相位,然后根据这些信号参数估计值初始化跟踪环路,以帮助接收通道展开对信号的跟踪。
传统GPS 信号捕获方法[1]对接收的卫星信号在多普勒频移域和码相位域进行二维线性扫描式搜索,其优点在于只需要少数几个数字相关器,并且这些相关器随后也可以用于信号跟踪过程,简化了硬件设计,其缺点是运算量大,捕获时间较长。基于载波(或多普勒频移)域的FFT 并行捕获算法[2]将二维搜索变为码相位域上的一维搜索,该算法对多普勒频移的估算精度取决于离散傅里叶变换的数据长度和数据的采样频率,使用短时间数据进行运算时多。普勒频移分辨率不高,导致信号捕获灵敏度性能变差,而使用长时间数据进行运算时在提高多普勒频移分辨率的同时也使FFT 点数增多,运算量增大。基于码相位域的FFT 并行捕获算法[3]将信号搜索变为多普勒频移域上的一维搜索,大幅度提高了捕获速度。文献[4]在基于码相位域的FFT 并行捕获算法基础上,用傅里叶系数的循环移位取代频率补偿和FFT 运算,继而将运算量较之原始算法减少一半。基于FFT 的并行捕获算法要求信号采样率为2 的幂次,一般的GPS 信号采样率较难满足,这就增加了计算复杂度而影响处理速度。文献[5]中介绍了一种基于平均采样技术的捕获算法,将FFT 数据点数重采样到2 的幂次点,减少了运算时间,也降低了硬件实现的难度和成本。
本文介绍了一种基于循环相关的捕获算法,与传统的线性搜索捕获算法相比,减少了运算量,同时保留硬件设计简单、数字相关器可用于后续信号跟踪过程等优点。
1 传统线性搜索捕获算法[6]
假设接收机接收到的GPS 信号经过射频前端处理之后可表示为:

式中PS是信号功率;C(n)是C/A 码,其值为± 1;D(n)是比特率50bps 的导航电文;ωIF是中频载波频率,其值由射频前端和多普勒频移决定;φ(n)是初始载波相位;e(n)为零均值高斯白噪声。
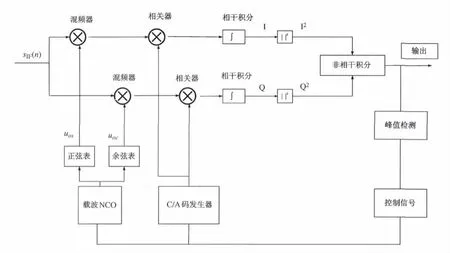
图1 线性搜索捕获原理
图1 给出了GPS 接收机线性搜索捕获算法的基本流程。本文以接收一颗卫星信号为例,在捕获过程中,数字中频信号sIF首先分别与同相支路的本地正弦和正交支路的本地余弦复制载波进行混频,然后混频结果与复制C/A 码进行相关,接着相关结果i 与q 经过时间为Tcoh的相干积分后生成数据对I和Q,

其中,a 为信号幅值;τ 为C/A 码相位与搜索码相位之间的差异;fe为接收载波频率与搜索频率之间的差异;Φe为两载波之间的相位差异;nI与nQ分别代表I 支路与Q 支路上均值为零且互不相关的高斯噪声。
假设非相干积分数目为Nnc,最后经非相干积分后得到非相干积分幅值V。

信号捕获的非相干检测法通过检测非相干积分幅值V 的大小来判断接收信号是否已经被搜索到:若非相干积分幅值V 小于捕获预先设置好的捕获门限Vt,则信号尚未被搜索到,于是接收机按照既定的搜索步长调节载波数控振荡器(NCO)和C/A 码发生器输出,继续在下一个搜索单元进行搜索与检测,直到确认信号成功捕获。
2 基于循环相关的捕获算法
2.1 算法原理
C/A 码是周期为1023 个码片的Gold 码,码率为fC/A=1.023Mcps,即在每个C/A 周期(1ms)有1023 个码片,且具有良好的自相关和互相关特性[7]。一般情况下GPS 软件接收机将接收信号从射频前端输出后进行中频采样,采样频率为fS,则一个C/A 码片周期(1ms)对应的采样点数N=fS/1000,相应的本地C/A 码也被重采样为N点。图2 示出基于循环相关的捕获算法流程,针对C/A 码相关过程进行改进,具体实现方法分为两步。
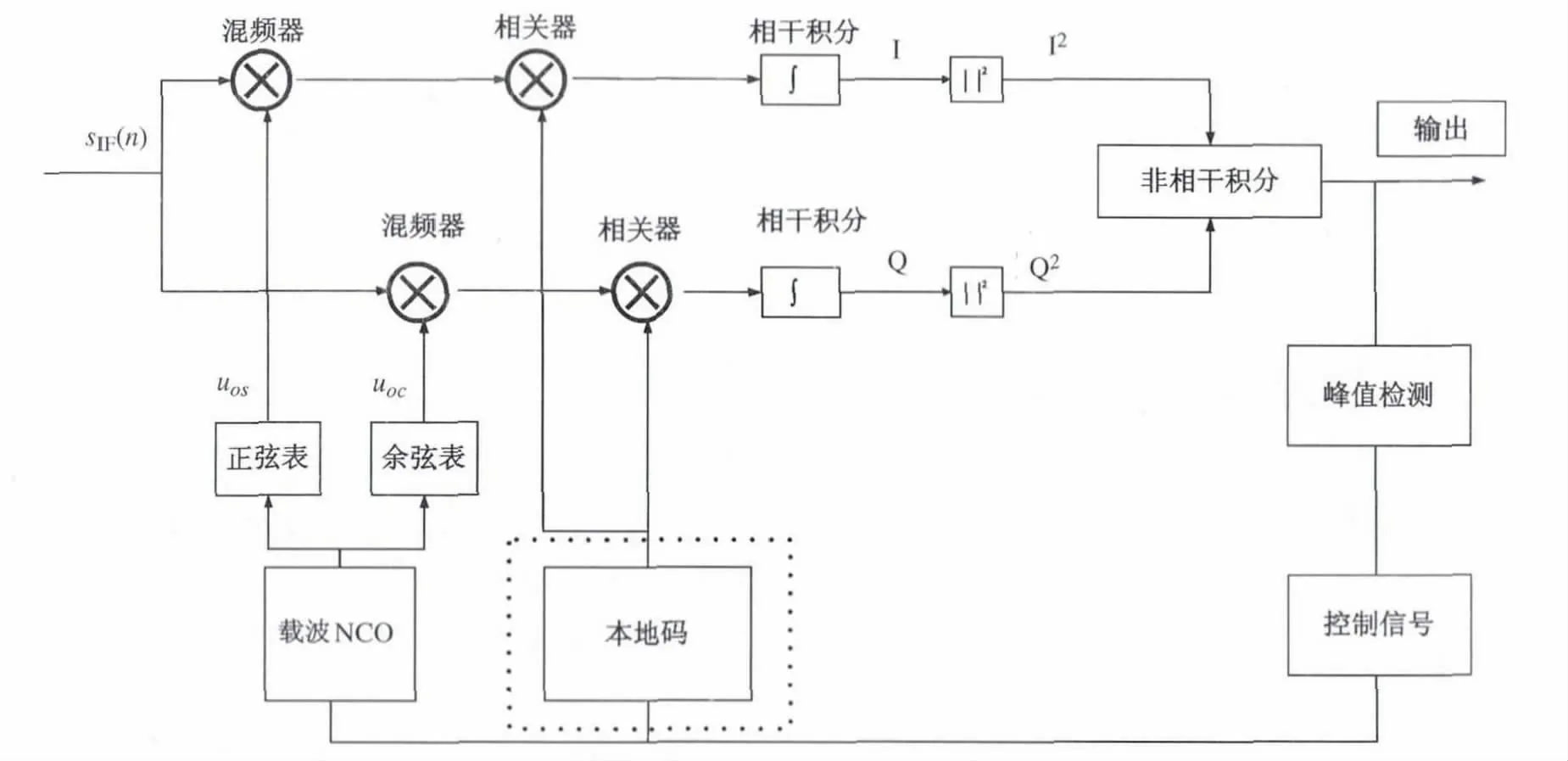
图2 基于循环相关的捕获算法流程图
a.对于采样后周期为N 的C/A 码序列C(n),假设接收信号序列为C(n +m),m 为接收信号码相位。本地C/A 码发生器产生的C/A 码为序列C(n),按照图3 所示循环移位后叠加构成新本地码序列h(n):

其中L 为每次循环移位点数,其取值将在3.2节中说明。为了方便公式推导,这里假设N 是L 的整数倍,实际情况下当N 不能被L 整除时,循环移位次数可以取N/L 的向上取整值。
将h(n)设为图2 虚线框中的本地码,接收信号c(n +m)与h(n)连续进行L 点循环相关运算,取模后结果为| R1(τ)|:
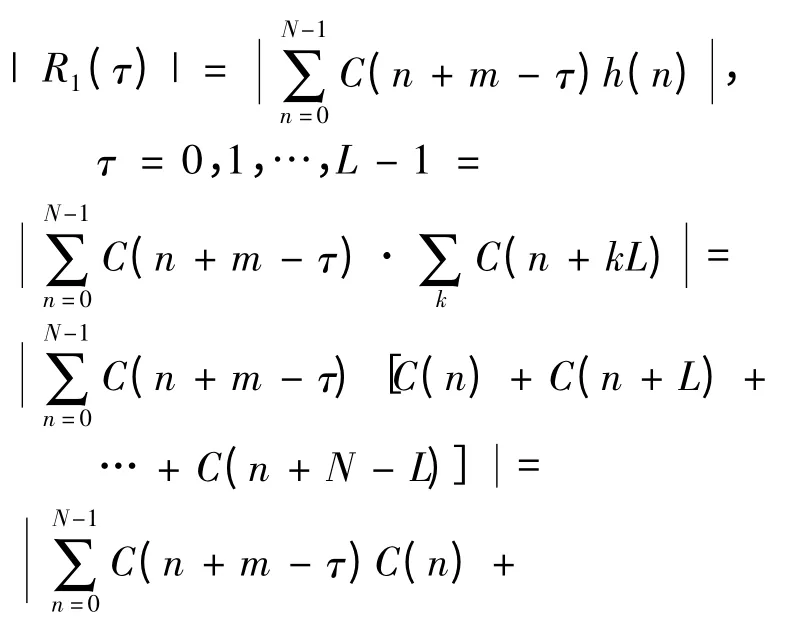
根据C/A 码良好的自相关性特点,当m-τ=KL 时,式(6)中有且只有一项会达到最大相关值,其余项都很小,找出|R1(τ)|最大值对应的τ。此时可以确认某GPS 卫星信号的存在,只是得到的码相位同步点存在若干个L 的模糊,即此时估算出的码相位为相对码相位,下一步确定接收信号的绝对码相位。
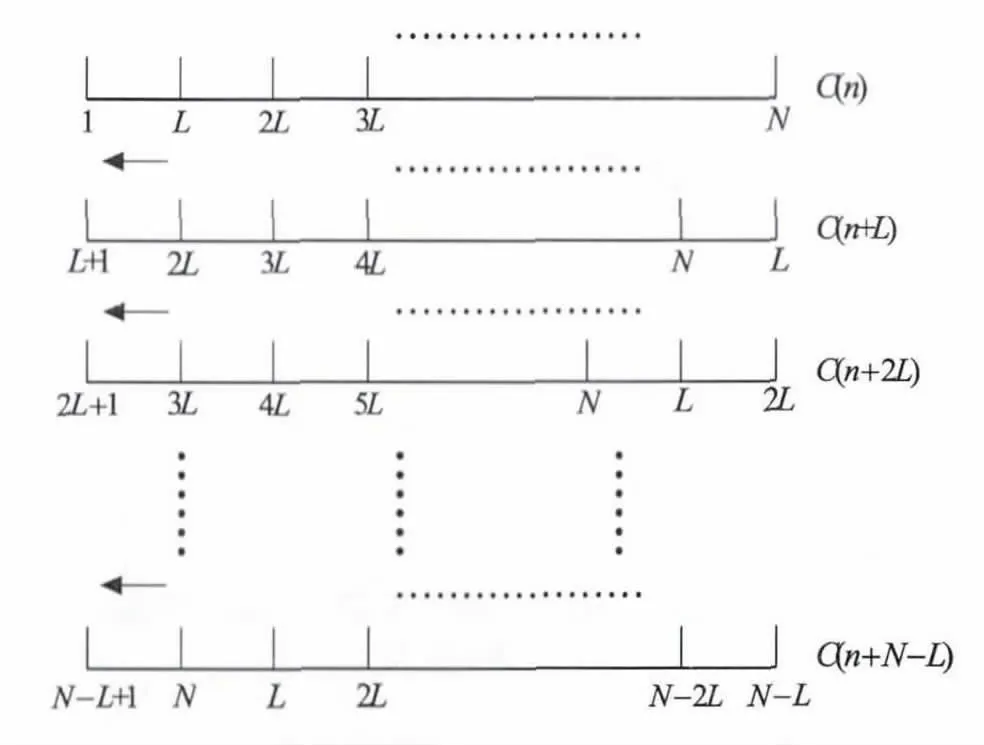
图3 本地C/A 码循环移位示意图
b.将原始C/A 码序列C(n)向左循环移位τ-1 个码片后设为图2 虚线框中的本地码,本地码与接收信号C(n+m)进行相关运算,对相关值取模后记录其大小,然后本地码向左循环移位L 个码片再与接收信号C(n+m)进行相关取模运算,如此进行N/L-1 次移位和相关取模后找出N/L 个相关模值中最大值所对应的循环移位次数K。最后计算出接收信号C/A 绝对码相位:

2.2 计算量分析
基于循环相关的捕获算法与传统线性搜索捕获算法相比,差别主要体现在相关运算的计算量上,而在多普勒频移分辨率方面则完全一样。

表1 运算量比较
从表1 中看出基于循环相关的捕获算法运算量与一个C/A 码片周期(1ms)对应的采样点数N、循环移位点数L 有关。当中频采样频率fS较大时,即一个C/A 码片周期(1ms)对应的采样点数N 较大情况下,基于循环相关的捕获算法运算量减少更为可观,节省了大量的捕获时间。采样频率fS一定时,即一个C/A 码片周期(1ms)对应的采样点数N 固定情况下,如果不考虑输出信噪比因素,当L=N1/2时运算量最小。然而基于循环相关的捕获算法构成新本地码之后进行相对码相位搜索时,使噪声分量相对于信号分量上升了N/L 倍,输出信噪比SNR 下降,较少的循环移位点数使SNR 恶化更为明显。
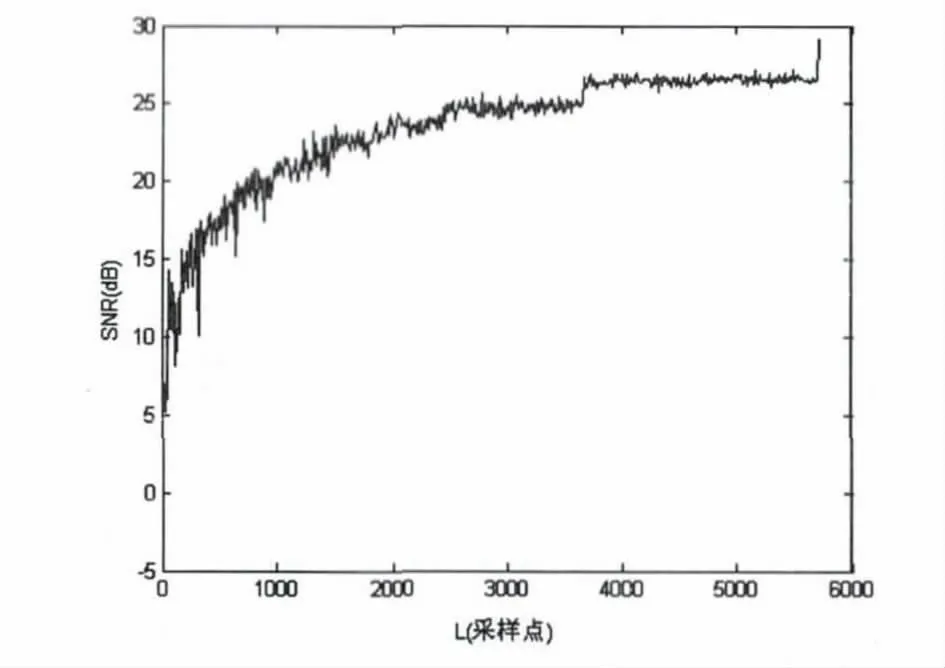
图4 L 与输出SNR 的关系
图4 表示输出信噪比SNR 与循环移位点数L的关系,SNR 曲线包络随着L 的增大而增大。在实际工程应用中,根据对输出信噪比和捕获速度的要求来确定循环移位点数L,从而确定新本地码的组成。
2.3 仿真与结果分析
实验数据为实际采集的GPS 信号。采用Zarlink 公司产品GP2015 芯片的射频前端,输出中频为1.405396MHz,采样率fS为5.714MHz,一个C/A 码片周期(1ms)对应的采样点数N=5714,本地C/A 码也被重采样为5714 点。本文使用Matlab 对采集到的数据进行仿真,捕获第7 号卫星信号。为了提高输出信噪比,保证可靠的检测概率,传统线性搜索捕获算法与基于循环相关捕获算法都采用了9ms 长度的相干积分。
图5 是运用线性搜索捕获算法对7 号卫星信号的捕获结果。图中峰值超过预先设定的门限,表明捕获成功,多普勒频移为-1400Hz,码相位为第3573 个采样点,运算量为2N2=65299592 次实数乘加运算。
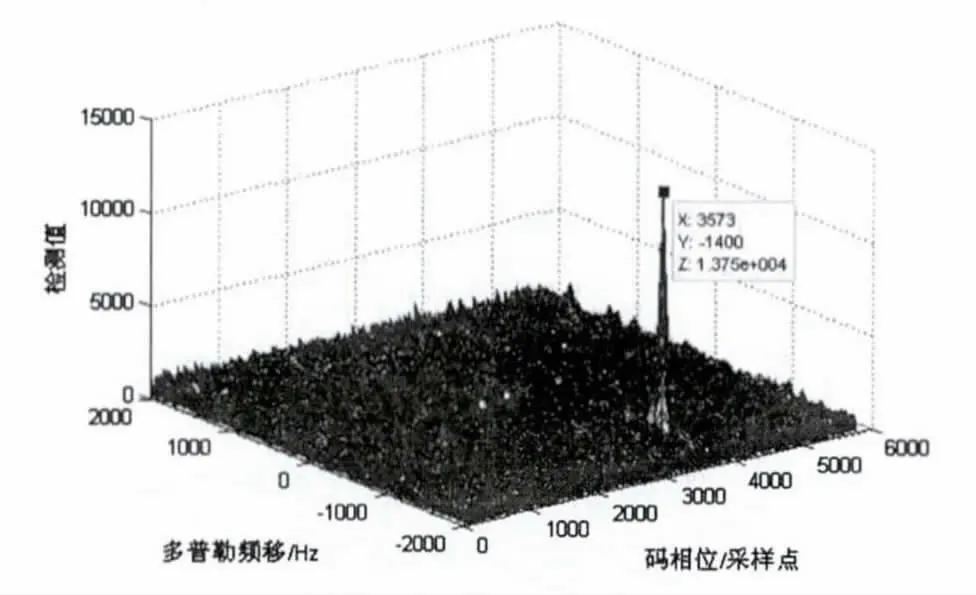
图5 线性搜索捕获结果
基于循环相关的捕获算法仿真中,本地C/A 码重采样后按3.1 节方法构成新本地码时取循环移位点数为L=1143,对应的循环移位次数为4。此时L的取值在输出信噪比和算法计算量之间做了折中,既保证了较高的输出信噪比,又大大减少了运算量。
图6 是基于循环相关的捕获算法对7 号卫星信号的捕获结果。图中尖峰峰值超过预设定的门限,表明捕获成功,多普勒频移为-1400Hz,C/A 码的相对码相位为第144 个采样点。
图7 表示基于循环相关的捕获算法第二步中循环移位次数和相关模值的关系。当循环移位次数为3 时,本地C/A 码与接收信号相关值取模后远远大于其他相关模值。由3.1 节式(7)可估计绝对码相位为第144 +3 ×1143=3573 个采样点。
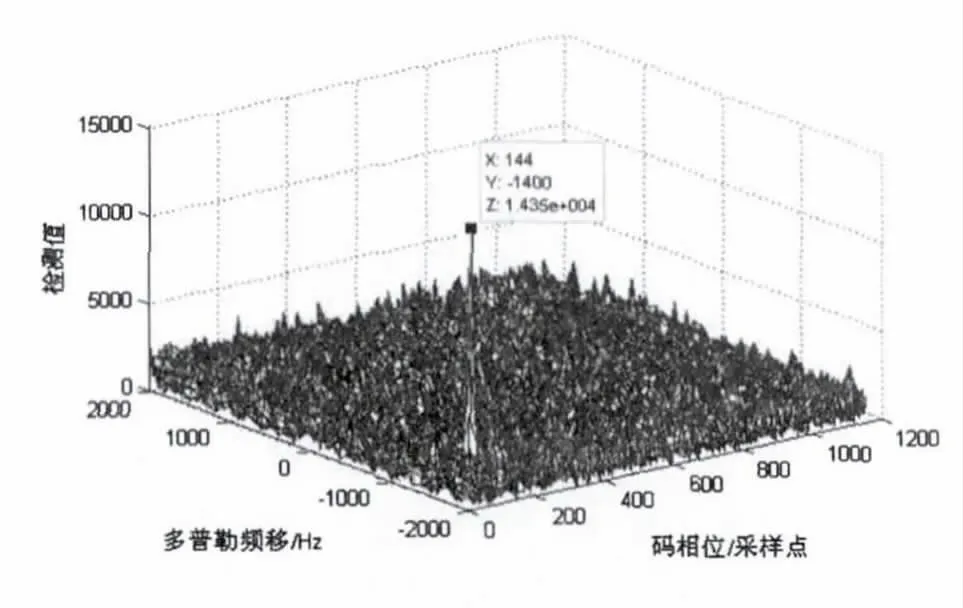
图6 基于循环相关的捕获结果
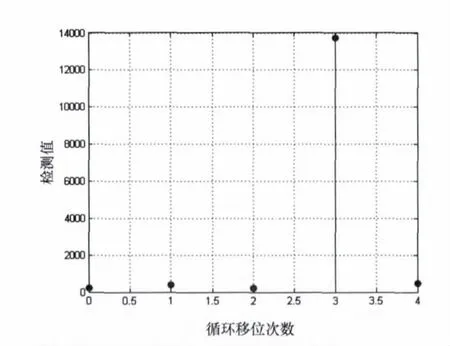
图7 循环移位次数和相关模值关系图
上述仿真结果与线性搜索捕获算法仿真结果一致,验证了基于循环相关捕获算法的正确性,运算量为2(N/L+L)N≈13119344 实数乘加运算。基于循环相关的捕获算法实数乘加运算大约只有线性搜索捕获算法的五分之一,运算量显著减小。
3 结论
本文讨论了GPS 信号线性搜索捕获算法实现,介绍了一种基于循环相关的捕获算法,结合串行和并行捕获方法,使运算量大大减少;硬件实现简单,只需要若干个数字相关器,且这些相关器随后可以用于信号跟踪过程。通过对两种算法仿真结果分析,验证了新算法的正确性。在构建本地新码时应该根据输入信噪比,捕获时间以及正确捕获概率的要求,来确定循环移位点数L 的值。
[1]Kaplan E D.Understanding GPS principles and applications [M].Norwood,MA:Artech House,1996.
[2]Frai D M.A fast acquisition CDMA receiver for burst transmission system[C].The 11th IEEE International Conference on ICECS,Sheraton Moriah Tel-Aviv,2004,342-345.
[3]Tang B,Liu S S,Tang W T.Design a L1 software receiver based on IF GPS signal simulator[C].The 8th International Conference on Signal Processing,Beijing,2006.
[4]陈希,张锐,帅涛.基于FFT 的GPS 快速并行捕获 算 法[J].宇 航 学 报,2011,32 (1) :162-166.
[5]曹单,汪澎,周建红.GPS 快速捕获算法与仿真[J].火控雷达技术,2012,41(1) :24-27.
[6]谢钢.GPS 原理与接收机设计[M].北京:电子工业出版社,2009.
[7]樊昌信等编.通信原理(第5 版) [M].北京国防工业出版社,2009.
猜你喜欢
昆明医科大学学报(2022年4期)2022-05-23
中华养生保健(2020年7期)2020-11-16
船舶标准化工程师(2019年4期)2019-07-24
中学生理科应试(2019年3期)2019-07-08
湖南教育·C版(2018年3期)2018-06-05
福建中学数学(2016年7期)2016-12-03
小学生导刊(低年级)(2016年11期)2016-11-14
火控雷达技术(2016年1期)2016-02-06
数学大王·中高年级(2014年7期)2014-08-06
读写算·小学低年级(2009年10期)2009-10-27