
基于子空间的目标跟踪算法研究
2014-02-02 08:48李静宇王延杰
液晶与显示 2014年4期
李静宇,王延杰
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
目标跟踪算法本质上是将非平稳的、随时间变化的目标和背景图像流进行处理,提取出感兴趣的目标在图像中的位置和速度等信息。末制导跟踪阶段,导弹的飞行姿态,弹体与目标的距离以及目标自身的运动姿态和形态均会发生较大的变化,从而导致拍摄到的目标发生旋转、缩放、甚至变形,极大地增加了对目标进行持续稳定跟踪的难度[1-3]。大多数现有的算法尽管能够在受控的环境中或者较短的时间周期内跟踪目标,但是当目标发生形态变化或者周围光照发生改变时,通常跟踪失败[4-6]。原因是这类算法通常采用固定的外观模型表达目标,这种模型外观在跟踪初始阶段一旦建立就不再改变,因而忽略了大量的跟踪过程中的信息(如形状的变化或特定的照明条件)。
为了改善对目标外观模型变化的适应性,Ross[7]等提出了一种可以在线更新的子空间作为目标的外观表达模型,取得了很好的效果。本章借鉴其思想,提出一种新的基于粒子滤波的子空间跟踪算法,在跟踪过程中有效地学习和更新用来表示目标对象的低维子空间。具有以下优点:用一组正交的稀疏子空间特征向量表示目标模型,而不是用单个模板,提供了一个紧凑和便于区分的目标表达方式,降低了图像数据的维度;采用增量方法不断更新子空间模型,以适应由于目标内在和外在因素所造成的在外观上的变化,从而提高跟踪精度;采用八参数的动态模型估计目标的运动状态,更接近真实情况;增量更新的子空间,采用在线学习的方式创建目标模型,不需要事先准备训练图像数据库;采用重要性采样算法以及最大似然估计,解决复杂的优化问题,取代了传统的梯度下降法,从而缩短了算法的运行时间。此外,该算法不需要背景的先验知识,当摄像机和背景图像发生相对运动时,仍然能够实现持续、稳定的跟踪,提高了末制导跟踪的稳定性和鲁棒性。
2 基于子空间的目标跟踪算法
2.1 稀疏矩阵特征提取
众所周知,图像是一个由大量像素组成的二维数组,给后续的处理带来了大量的数据量[8-9]。为了减小计算量,并不影响识别与跟踪性能,本文采用稀疏矩阵提取目标的特征。假设目标在相邻两帧中的运动满足透视变换[10],即

(1)
其中:(x,y,1),(x′,y′,1)分别为相邻两帧目标图像的齐次坐标表示,H为透视变换矩阵,是一个3×3矩阵,去掉归一化系数w,共有8个自由度,可分解为如下形式:

(2)
定义1:(tx,ty,sxsy,θ,α,β,γ)为目标的八参数表述。tx,ty表示目标的中心位置,sx,sy表示目标缩放的比例因子,θ,α,β,γ表示目标发生旋转、斜切和梯形变换的角度。
定义2:稀疏矩阵特征提取:已知目标图像I的实际大小为H×W,稀疏图像T的维度为N×M,坐标系为直角坐标系,图像的左上角为坐标原点,向右向下为正,表达式、为稀疏矩阵特征提取过程
T(n,m)=I(h,w),
(3)
(4)

图1 稀疏矩阵特征提取Fig.1 Sparse matrix feature extraction
其中:m=1,2,…,M,n=1,2,…,N,w=1,2,…,W,h=1,2,…,H、ϖ为归一化系数。
图1分别给出了8×8、16×16、32×32和64×64的稀疏矩阵特征提取结果。
2.2 子空间的建立与更新
假设已经得到n幅空间配准的目标图像,每个图像应用2.1节中的方法,生成一个大小为M×N维的稀疏矩阵。将所有像素按列重新排成一列,将有n个p=M×N维向量(I1,I2,…,In),它们可以被看成是随机向量I的样本,其期望为μ。

(5)

(6)

(7)


图2 目标子空间的建立Fig.2 Establishment of the target subspace
2.3 系统动态模型
如前所述,目标在图像中的定位可以采用八参数表述(X=(tx,ty,sxsy,θ,α,β,γ)T)。
一般情况下,可以假设目标在相邻帧中做随机布朗运动[11-12],目标在t时刻的状态Xt以t-1时刻的状态Xt-1为中心,满足高斯分布:
pXtXt-1=NXt;Xt-1,Ψ,
(8)
其中:Ψ为对角矩阵,对角线上的元素为相应的透视变换参数的方差:
(9)
2.4 系统观测模型
目标图像的观测值It可以通过目标图像均值μ和子空间特征向量集U表示:
p(ItXt)=N(It;μ,UUT+εI),
(10)
其中ε→0,I为单位阵,εI为系统的观测噪声。因此观测值It的似然概率:
UUT+εI-1It-μ,
(11)
其中:

(12)
2.5 最大似然估计
目标的状态X是潜在的变量,我们无法知道它真实值的大小。但是我们可以有效地采用抽样方法近似估计目标的状态。根据目标的动态模型,进行随机抽样,对于每一个样本状态Xi,我们计算它的似然概率p(It|Xi)。使似然概率取得最大值时的样本状态,将作为新的目标状态。
(13)
3 结果与讨论
实验一为采用加拿大多伦多大学机器学习实验室的“dudek”视频序列所做的跟踪实验,实验结果如图3所示。

图3 跟踪实验一Fig.3 Tracking experiment one
图中蓝色细线框为Ross 的IVT算法跟踪结果,红色粗线框为本文跟踪结果,黄色的“x”为标志特征点的实际位置,红色“x”为本文算法估计的位置。同样采用300个粒子,从图中可以看出IVT算法在第295帧之后发生偏移。原因是由于本文采用八参数的目标稀疏表述方法更接近目标运动的真实情况,当目标发生部分遮挡(104帧和492帧),旋转(107帧、194帧和561帧),以及光线变化(398帧)时均能够实现稳定的跟踪。
图4为本文算法和IVT算法的跟踪误差比较曲线。横坐标代表帧号,纵坐标代表标志特征点的实际位置与估计取值的均方误差。本文算法仅在被部分遮挡的104帧和492帧出现误差峰值,之后便能迅速恢复稳定跟踪。
实验二为外场试验的跟踪结果,如图5所示。每一幅图由15幅子图组成,最大的一幅为当前帧的跟踪结果,红色框为目标在当前帧的运动状态。
下面的四幅子图为目标的平均值、当前跟踪窗内的目标图像、目标在子空间投影的误差图像和目标重建图像。最下面的十幅为目标子空间基图像。跟踪过程中目标尺度迅速变大,并且受到尾气的干扰,本文算法能够实现对其稳定跟踪。

图4 跟踪误差比较Fig.4 Comparison of tracking error
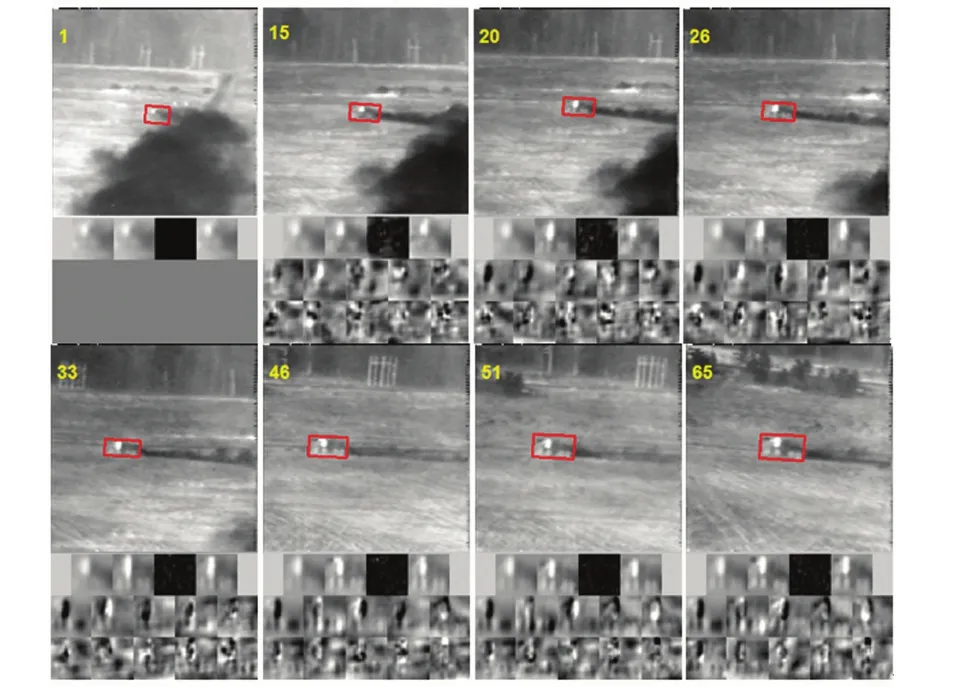
图5 跟踪实验二Fig.5 Tracking experiment two
4 结 论
本文提出的基于子空间的目标跟踪算法采用增量的形式更新目标子空间模型,为目标的描述构造了一个低维的子空间模型,该算法能够适应目标外观的时变特征。实验结果证明,当目标发生旋转、缩放以及亮度变化和部分遮挡等情况时,仍然能够实现对目标的长时间鲁棒跟踪,平均跟踪误差小于10个像素。基本满足末制导跟踪系统的稳定性和鲁棒性等要求。
[1] 陈尚峰. 成像末制导目标检测与跟踪技术研究 [D]. 长沙:国防科学技术大学,2009.
Chen C F. Research on targets detecting and tracking for image homing guidance [D]. Changsha:National University of Defense Technology,2009. (in Chinese)
[2] 朱秋平,颜佳,张虎,等. 基于压缩感知的多特征实时跟踪[J]. 光学 精密工程,2013,21(2):437-444.
Zhu Q P,Yan J,Zhang H,etal. Real time tracking using multiple features based on compressive sensing [J].Opt.PrecisionEng.,2013,21(2):437-444. (in Chinese)
[3] 贾平,徐宁,张叶. 基于局部特征提取的目标自动识别[J]. 光学 精密工程,2013,21(7):1898-1905.
Jia P,Xu N,Zhang Y. Automatic target recognition based on local feature extraction [J].Opt.PrecisionEnginee-ring,2013,21(7):1898-1905. (in Chinese)
[4] Li J Y,Wang Y L,Wang Y J. Visual tracking and learning using speeded up robust features [J].PatternRecognitionLetters,2012,33(16):2094-2101.
[5] 王田,刘伟宁,韩广良,等. 基于改进MeanShift的目标跟踪算法 [J]. 液晶与显示,2012,27(3):396-400.
Wang T,Liu W N,Han G L,etal. Target tracking algorithm based on improved Meanshift [J].ChineseJournalofLiquidCrystalsandDisplays,2012,27(3):396-400. (in Chinese)
[6] 刘扬,张云峰,董月芳. 复杂背景下抗遮挡的运动目标跟踪算法 [J]. 液晶与显示,2010,25(6):890-895.
Liu Y,Zhang Y F,Dong Y F. Anti-occlusion algorithm of tracking moving object in clutter background [J].ChineseJournalofLiquidCrystalsandDisplays, 2010,25(6):890-895. (in Chinese)
[7] Ross D A,Lim J,Lin R,etal. Incremental learning for robust visual tracking [J].InternationalJournalofComputerVision,2008,77(1-3):125-141.
[8] 葛微,程宇奇,刘春香,等. 基于子空间分析的人脸识别方法研究 [J].中国光学与应用光学,2009,2(5):377-387.
Ge W,Cheng Y Q,Liu C X,etal. Research of face recognition methods base on subspace analysis [J].ChineseJournalofOpticsandAppliedOptics,2009,2(5):377-387. (in Chinese)
[9] 孙晓燕,常发亮. 梯度特征稀疏表示目标跟踪 [J]. 光学 精密工程,2013,21(12):3191-3197.
Sun X Y,Chang F L. Object tracking based on sparse representation of gradient feature [J].Opt.PrecisionEng.,2013,21(12):3191-3197. (in Chinese)
[10] 李忠新.图像镶嵌理论及若干算法研究 [D].南京:南京理工大学,2004.
Li Z X. On the theory of image mosaicing and its related algorithms [D]. Nanjing:Nanjing University of Science and Technology,2004. (in Chinese)
[11] 钱诚. 增量型目标跟踪关键技术研究 [D].杭州:浙江大学,2011.
Qian C. Research on key techniques of incremental object tracking [D]. Hangzhou:Zhejiang University,2011. (in Chinese)
[12] 杜超,刘伟宁,刘恋. 一种基于卡尔曼滤波及粒子滤波的目标跟踪算法 [J]. 液晶与显示,2011,26(3):384-389.
Du C,Liu W N,Liu L. Target tracking algorithm based on kalman filter and particle filter [J].ChineseJournalofLiquidCrystalsandDisplays, 2011,26(3):384-389 . (in Chinese)
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
电子制作(2019年15期)2019-08-27
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
噪声与振动控制(2015年4期)2015-01-01
