5R关节型机械手动力性能分析及其仿真的研究
2014-02-10 07:41刘义杰李建维
机电工程技术 2014年11期
陶 柯,刘 兴,刘义杰,李建维
(1.沈阳工业大学,辽宁沈阳 110870;2.北方重工集团有限公司,辽宁沈阳 110000)
5R关节型机械手动力性能分析及其仿真的研究
陶 柯1,刘 兴1,刘义杰1,李建维2
(1.沈阳工业大学,辽宁沈阳 110870;2.北方重工集团有限公司,辽宁沈阳 110000)
基于机械手和数控机床的布局要求,对5R机械手动力性能进行探究,并通过ADAMS建立模型并进行仿真,在不同条件下得出各个关节的力矩变化曲线,然后对比分析数据,在本体设计中加以改进优化。
关节型机械手;动力学分析;ADAMS;仿真
0 前言
关节型机械手具有高度的灵活性和能动性,其作为自动化生产中的上下料工具,既提高了效率,又能保证加工精度和产品质量[1]。本文就是根据数控机床、加工工件和机械手的布局,对5R机械手动力性能进行探究,运用D-H法对机械手系统进行运动学分析,采用拉格朗日方法进行动力学计算,然后通过ADAMS进行动力学仿真。

图1 5R机械手关节坐标系
1 5R机械手机构运动学描述
1.1 建立系统坐标系
在机械手系统各运动关节上建立坐标系,该机械手有6个活动构件组成,具有5个旋转关节,在各个关节上建立坐标系,如图1。

表1 5R机械手参数
1.2 各个连杆及关节参数的确定
根据数控机床、加工工件和机械手的布局及上下料流程(如图2),初步确定各连杆及关节的参数,如表1[2]所示。

图2 5R机械手上下料路径图
1.3 坐标系矩阵的变换
由表1及图1可以得到连杆坐标系{i}相对于坐标系{i-1}的变换矩阵
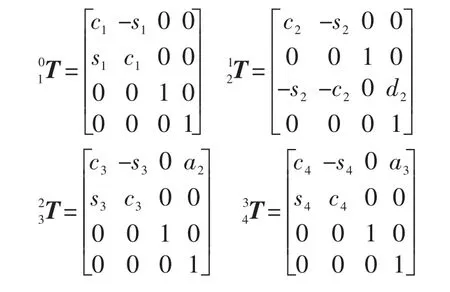
则各关节坐标系{i}相对于基坐标系{0}的描述,有

2 系统的动力学分析
拉格朗日函数,表示系统总的动能Q与总的势能U之差,即:

式(1)中,q=[q1,q2,q3,…,qn]表示动能和势能的广义坐标,表示相应的广义速度。
根据拉格朗日函数L,可得系统动力学方程为:

式中F是n×1的关节驱动力或力矩矢量。
2.1 系统动能分析计算
(1)各个连杆质心的坐标(相对自身坐标系)矩阵(量纲为mm)

(2)各个连杆的质量矩阵(量纲为kg)

(3)各个连杆的惯性张量(量纲为kg·mm2)

(4)各个连杆的伪惯性矩阵通式(量纲为kg· mm2)

(5)连杆系统的惯量矩阵

通过以上参数,则机械手系统第i连杆的动能为:

故,5连杆机械手连杆系统总动能为:

此外机械手系统传动装置总动能:

其中,Ici——为传动装置的等效转动惯量,kg·m2。则:

2.2 系统的势能分析计算
(1)连杆系统的哥氏力和向心力的计算

(2)重力项的计算

其中重力矢量:

则该机械手连杆系统的重力项矩阵可表示为:

(3)各连杆质心的位置矢量(相对基座标)的求解:

则不计传动装置的势能,5R机械手系统的总势能为:

2.3 系统的拉格朗日动力学方程
将以上各参数代入到拉格朗日动力学方程,可以得到:

即可得到各个连杆的驱动力或力矩,由于此处计算较繁琐,可借助计算机求解。

3 5R机械手系统的动力学仿真
三维实体的建模对其动力学仿真有重要影响。本文先通过Pro-E建模,然后导入到ADAMS环境中,对模型添加约束。在仿真时,可以得出各关节在运动过程中的变量变化曲线。
3.1 不同条件下关节力矩的探究
已知待加工工件重60 N,加工后为50 N。拟定机械手A、B两种运动轨迹。
总节拍为24 s时,机械手在上下料过程中A、B轨迹下各关节力矩的变化曲线(如图3、图4)。

图3 24 s-A力矩变化曲线

图4 24 s-B力矩变化曲线
改变节拍,在总时间为16 s时各关节在A、B轨迹下的力矩曲线(如图5、图6)。

图5 16 s-A力矩变化曲线
3.2 数据结果的比较
在相同节拍时,B轨迹相对于A轨迹各关节力矩峰值的增幅,如表2。
在A、B同种轨迹下,16 s相对于24 s各关节力矩峰值的增幅,如表3。

图6 16 s-B力矩变化曲线
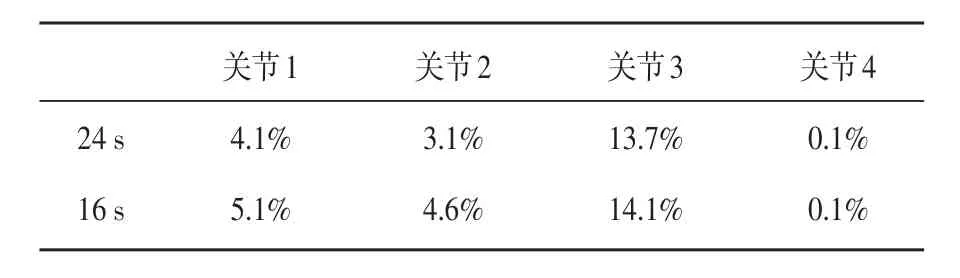
表2 同种轨迹下不同节拍的力矩增幅

表3 相同节拍下不同轨迹的关节力矩增幅
4 结论
通过以上曲线和数据,可以得出以下结论:
(1)在总节拍时间相同的情况下,机械手末端运动路径对关节的力矩峰值影响很小,可以忽略不计;
(2)在同种轨迹下,缩短运行时间,各关节的力矩变化的平稳性变差;
(3)关节1力矩主要受运行时间的影响,当明显改变关节运行时间时,其力矩变化很显著;
(4)关节3、4的力矩主要受重力影响,角加速度变化对其影响不大。
[1]白丽平.基于ADAMS的机器人动力学仿真分析[J].机电工程,2007,24(7):74-77.
[2]Ke Tao,Yuanyuan Zhang.The Mechanism Analysis and Trajectory of 5R Joint Manipulator[J].Applied Me⁃chanics and Materials,2012,220(10):1744-1747.
[3]李金恒,肖慧,胡志华.基于ADAMS的机械手臂运动仿真分析 [J].机床与液压,2009,37(8):206-209.
[4]车仁炜,吕光明,陆念力.五自由度康复机械手的动力学分析[J].哈尔滨工业大学学报,2005,37(6):744-747.
[5]熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,2004.
Dynamic Analysis and Simulation of 5R Multi-Joint Robot
TAO Ke1,LIU Xing1,LIU Yi-jie1,LI Jian-wei2
(1.Shenyang University of Technology,Shenyang110870,China;2.North Heavy Industries,Shenyang110000,China)
Based on the layout requirements of the Robots and CNC machine tools,5R multi-joint robot structure parameter are designed and dynamic simulation model are built by ADAMS.By dynamics simulation analysis,torque changing curves are obtained.Then after analyzing the curves,the real design of the body can be improved.
multi-joint robot;dynamic analysis;ADAMS;simulation
TP241
:A
:1009-9492(2014)11-0024-05
10.3969/j.issn.1009-9492.2014.11.007
陶 柯,男,1958年生,辽宁沈阳人,硕士,副教授。研究领域:机电系统的控制与优化。
(编辑:阮 毅)
2014-05-30
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
制造技术与机床(2018年11期)2018-11-23
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年4期)2017-06-22
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年1期)2016-04-16
探测与控制学报(2015年4期)2015-12-15