
A Novel Estimating Method for Steering Efficiency of the Driver with Electromyography Signals
2014-03-01 01:48LIUYahuiJIXuewuHAYAMARyouheiandMIZUNOTakahiro
LIU Yahui, JI Xuewu, HAYAMA Ryouhei, and MIZUNO Takahiro
1 State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing 100084, China
2 Research and Development Center, JTEKT Co., Ltd., Nara 634-8555, Japan
1 Introduction
The evaluation of steering comfort is very important for the development of the steering system, and in turn for that of the easy-control or human-friendly vehicle. Till now, the evaluation of steering comfort is mostly based on the subjective feeling of driver[1–3], in addition to some objective experiments of vehicle controllability and stability[4]. However, the objective evaluation based on driver physiology principle is also expected, although the subjective feeling might be the final evaluation criteria. The driver steering maneuver efficiency means the efficiency of driver physiological output efficiency for performing certain steering operation. The physiological workload of driver relates to his/her physiological fatigue, meaning that the physiological output efficiency which reflects physiological workload will influence driver steering comfort in uncertain relations. From this point, the estimation of steering maneuver efficiency with use of physiology characteristics of the driver becomes very important. This paper will develop an estimation method about driver steering efficiency, the research about the relations of driver steering efficiency and steering comfort will be studied in further study.
The function of the muscles of driver’s upper limb in vehicle steering was investigated by means of the electromyography concerned with the physiology principle of muscle[5–7]. These studies classified the prime movers during contralateral steering and important stabilizers during steering. Macadam concluded some characteristics of the driver in physiology and psychology, for modeling the driver[8]. Refs. [9–14] study the muscular behavior in steering task to develop a neuromuscular dynamics model of driver. They also studied the properties of the driver arm and some muscles including the measurement method of the steering torque with the help of the electromyography(EMG) of the driver[15–16]. In their approach[16], the co-contraction steering torque was calculated by EMG signals with a regression model. However, the co-contraction steering torque would depend on different steering conditions, which means the index of co-contraction steering torque is less effective than steering efficiency of driver when evaluating one certain driver’s ability of steering.
In this research, an estimation method of the steering efficiency of driver is developed. This method includes three procedures: (1) identifying important muscles based on their function in steering movement; (2) developing regression formula by means of the EMG signal of the important muscle identified; (3) calculating the efficiency of driver in different scales, including the efficiency in time scale and the average efficiency of certain task. In section 2,the important muscles that primarily generate the steering moment are presented by using the function identification results of our previous studies[17–19]. In section 3, the regression analysis is conducted based on the experiments,and the estimation formula of steering force with EMG signals of driver in all steering modes is obtained. Section 4,proposes the estimating method of steering efficiency. And section 5, presents discussions.
2 Results of Muscles Classification in Steering Maneuver
The steering movements round the shoulder joint are shown in Fig. 1. The functions of the shoulder and upper arm muscles primarily related to the shoulder movements are shown in Table 1. The identification results of the function in steering of these muscles are shown in Table 2 in detail.

Fig. 1. Upper limb motions round shoulder joint in steering

Table 1. Functional groups of muscle
In this study, the muscles shown in Table 1 and Table 2[19]were investigated. And the important muscles for estimating purpose were chosen from the 10 muscles of prime mover and fixator in full steering mode (including the passive and active steering). The candidates were TB-L,PMA-C, DELT-A, DELT-P and TM, which included both the prime mover and fixator in steering maneuver.

Table 2. Muscle classification
3 Estimation of Steering Force Based on EMG Signals
What we desire is the potentiality of estimating the steering efficiency that can be used to evaluate the driver steering movement and steering comfort. In order to investigate this potentiality and obtain an acceptable method for estimating steering efficiency, we have to examine the estimation of steering force with use of EMG signals.
3.1 Procedure of experiments
In order to estimate the steering force with use of EMG signals, the measurement of the EMG signals of the selected muscles and steering force related to the steering torque was performed. The experiments included all steering modes in real steering maneuver, and had been presented in our previous studies[17–19].
The descriptions of the experiments are presented as follows.
There were two experiments performed for each subject,which were the passive steering and active steering tests.Fig. 2 illustrates the test posture.

Fig. 2. Subject in the posture studied in the present paper
In each experiment, the subject was seated in the driver seat, and held the steering wheel with right hand at the 3 o’clock position as the neutral or basic posture in a driving simulator, the same as the driving posture in a real car but without fastening the seat belt and with the left hand released from the steering wheel. The seat and steering wheel were adjusted so that the arm was slightly bent at the elbow (approximately 110° between the forearm and upper arm) and the line along steering axis (steering column) was approximately parallel to the line through the shoulder and wrist joints when held at the 3 o’clock position.
In the passive steering test, the subject was instructed to stabilize the steering wheel in its neutral position under the disturbed torque produced by a motor. This disturbed torque is shown in Fig. 3. In the active steering test, the subject was instructed to perform a sine steering like a slalom steering test. This active steering input is shown in Fig. 4. Nineteen male subjects participated in the experiment and gave their informed consent to the procedure, which was approved by the local ethical committee. The subjects are described in Table 3.
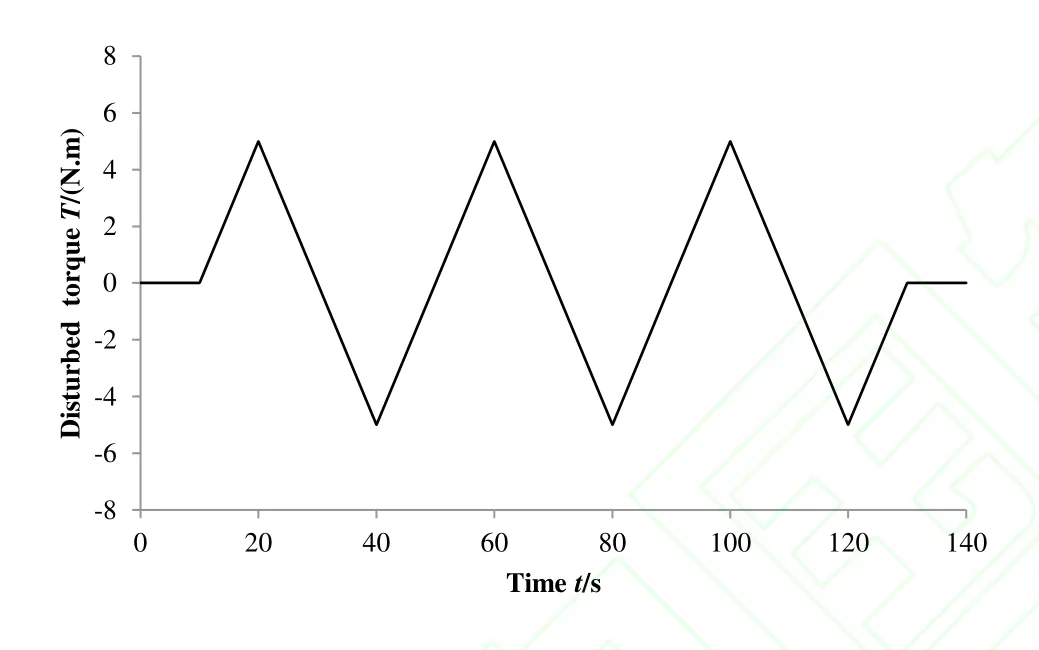
Fig. 3. The disturbed torque produced by a motor in driving simulator
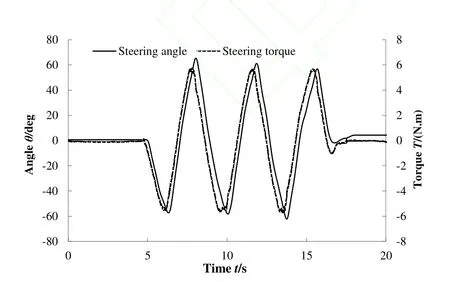
Fig. 4. Active steering input
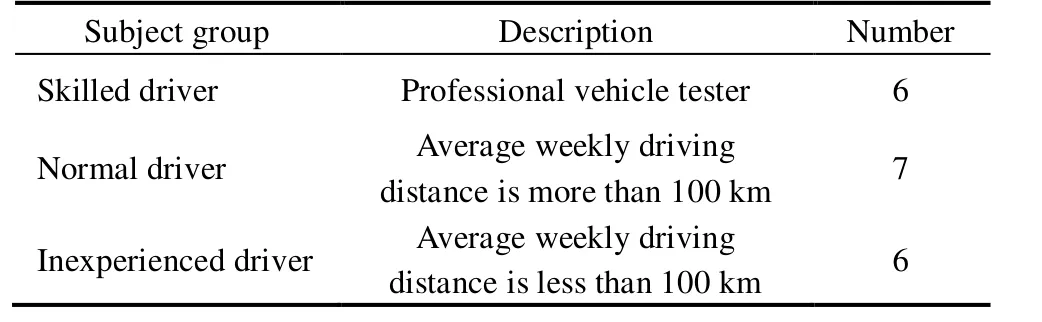
Table 3. Subjects
3.2 Regression of steering force
In the experiments, the steering forces were detected,including the tangential and radial forces exerted on the steering wheel, shown in Fig. 5. Fywas the tangential force from the grasping position to upwards, hence related to the moment Mz. Fxwas the radial force from the grasping position to the center of the steering wheel, which did not relate to any moment round the steering column shaft.Therefore, only the tangential force Fywas estimated in this study, in order to estimate the steering efficiency.

Fig. 5. Steering force in the wheel plane
To estimate the tangential force (which will be expressed by effective steering force later in this paper), an expression giving linear relation between the effective force and the EMG signals was used, assuming that the forces in the steering wheel plane are counteracted by the muscle forces.

where a1,…, aiare the constant regression coefficients that are estimated by the multiple linear regression. REMG1,…,REMGiare the root-mean-square values of the EMG signals. And i is the variable number of the EMG signals.
3.2.1 Force regression in passive steering
The regression results of the passive steering are shown in Table 4. It indicated that the muscles would play different roles with different steering force directions, by giving the regression coefficients with different signs (plus and minus). Which could also be seen in the muscle classification results that shown in Table 2.
From Table 4, it can be seen that the multiple correlation coefficients of the effective steering force based on the 5 muscle candidates were mostly around 0.9. These multiple correlation coefficients were close to what were calculated with use of all (10) detected muscles, seen in Fig. 6.Therefore, the TB-L, PMA-C, DELT-A, DELT-P and TM could give good fits to estimate the effective steering force of driver under the passive steering condition.

Table 4. Regression coefficients and multiple correlation coefficient for the right arm of the passive steering
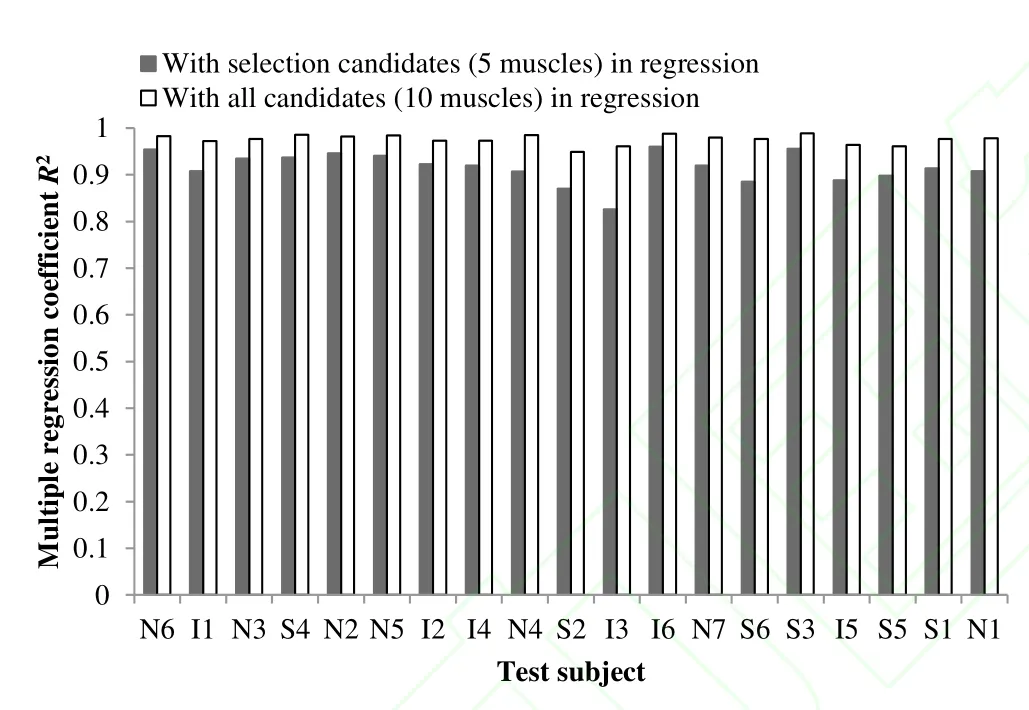
Fig. 6. Multiple correlation coefficients in the passive steering that calculated with different variable numbers in regression
3.2.2 Force regression in active steering
The regression results of the active steering are shown in Table 5. It also indicated the phenomenon that the muscles would play different roles with different steering force directions, by giving the regression coefficients with different signs. From Table 5, it can be seen that the multiple correlation coefficients of the effective steering force based on the 5 muscle candidates ranged in values from 0.648 to 0.897. These multiple correlation coefficients were also close to what were calculated with use of all (10)detected muscles, seen in Fig. 7. Therefore, the TB-L,PMA-C, DELT-A, DELT-P and TM could give good fits to estimate the effective force of the driver under the active steering condition.

Table 5. Regression coefficients and multiple correlation coefficient for the right arm of the active steering
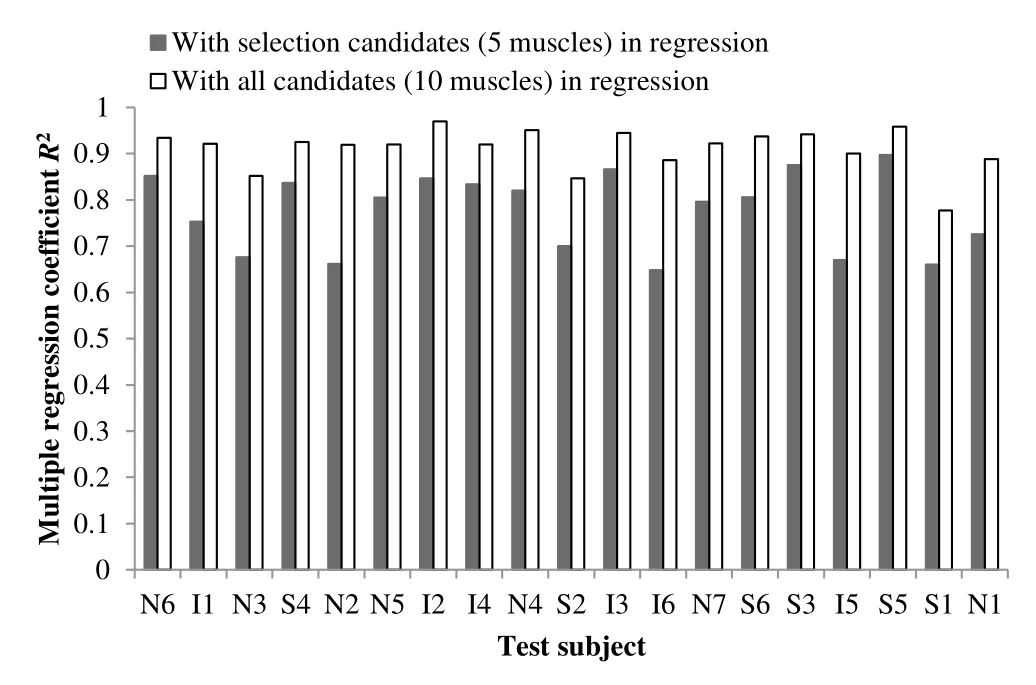
Fig. 7. Multiple correlation coefficients in the active steering that calculated with different variable numbers in regression
From Table 4 and Table 5, there can be seen that the multiple correlation coefficients of active steering conditions were smaller than those of passive steering conditions. The reason of this phenomenon is that in passive steering, the contraction type of investigated muscles is isometric contraction strictly, meaning the muscle force and its EMG signal presents linear relation.But the contraction type is approximately assumed as isometric contraction in active steering, where the muscle force and its EMG signal will present less linear relation than passive steering. Although the multiple correlation coefficients in active steering were smaller than in passive steering, they also supported the assumption of linear relation between effective force and EMG signals, meaning the multiple regression analyses could be used for steering force estimation.
3.3 Estimating steering force with use of EMG signals
The regression analyses showed that the EMG signals could be used to estimate the effective steering force although the regression coefficients were quite different for different drivers or different steering modes. It seems that the steering force could be estimated by the EMG signals of certain driver who applied this force. Based on the regression analyses, the estimation formula of the effective steering force in all steering modes could be expressed as follows:

where i and j are the variable number of the EMG signals and steering mode respectively, aj1,…, ajiare the regression coefficients that are estimated by multiple linear regression.REMGj1,…, REMGjiare the root-mean-square values of the EMG signals.
The steering task includes two steering modes or conditions, which are the passive (stabilizing the steering wheel against the disturbed torque applied to the steered wheel in order to keep the lane) and active (in order to change the driving lane) tasks. Therefore, the regression coefficients shown in Table 4 and Table 5 could be used in Eq. (2) to estimate the steering force in different steering modes in the situation of right hand steering.
One example of the estimation results is shown in Fig. 8.It can be seen that the estimation result fit very well to the measured result with use of Eq. (2). The large estimation errors appeared at the start regions in passive steering. A possible explanation is that, the muscles should contract to counteract the gravity of the upper limb and the subject was nervous at the beginning when counteracting the disturbed force. And the large estimation errors appeared at these regions when the steering forces are around 0 N · m in the active steering. One possible explanation is that at these regions the muscles should contract to counteract the gravity of the upper limb.

Fig. 8. Estimation of the steering force with the EMG signals in two steering modes for subject S1
In the processing of test results, the root-mean-square value, ‘REMG’, was calculated and compared to the force recorded at the end of a calculating period of REMG,assuming the force level here to be caused by muscle activity in the preceding calculating period. Therefore, the estimated force has phase advance than the measured force.This phase advance could be seen clear in active steering because of the larger time unit coordinate.
4 Estimation of Steering Efficiency Based on EMG Signals
In order to estimate the steering efficiency of driver, the effective output and total power should be calculated. The effective output of driver is the mechanical work of steering maneuver that can be calculated with the conventional methods (with the steering torque and angle). But the total power of driver cannot be predicted or estimated with the conventional methods, because the direct measurement of the driver’s inner force or torque of the body tissue such as the muscle is infeasible. Consequently, the steering efficiency of the driver could not be estimated with any conventional methods. Therefore, the novel estimation methods of the steering efficiency of driver are expected.
4.1 Estimation of the force produced in each muscle and the total force capacity
The steering force that generates the effective output of these muscles could be estimated with use of EMG signals and their corresponding coefficients could be calculated based on the analyses in section 3. And according to Eq. (2),the force produced by one certain muscle can be calculated.Therefore, the total force capacity produced by driver could be obtained.
Based on Eq. (2), the expression for the force of each muscle and the total force capacity can be expressed as follows:

where Fiis the force of certain muscle in certain steering mode, Ftis the total force capacity of the tangential force component produced by the muscles in steering, which is described here with the absolute value but without any direction.
Based on Eq. (4), the total force capacity could be calculated. An example of this calculation result is shown in Fig. 9. The estimated force value in Fig. 9 illustrated the absolute value of the steering force, which was estimated with the EMG signals.
From Fig. 9, it can be seen that the total force capacity produced by the subject during steering was much larger than the steering force value (external force works on steering wheel). This phenomenon illustrated that the muscles of the driver not only applied the effective steering force on the steering wheel with their contraction, but also generated much more force for other purposes such as stabilizing or controlling the steering movement of the upper limb. Therefore, the steering efficiency could be estimated with the steering force and total force capacity of the tangential force component. During steering maneuver,the least force capacity appeared in these moments when the steering force was nearly 0 N. Here, the force capacity helped the subject stabilize his posture only.
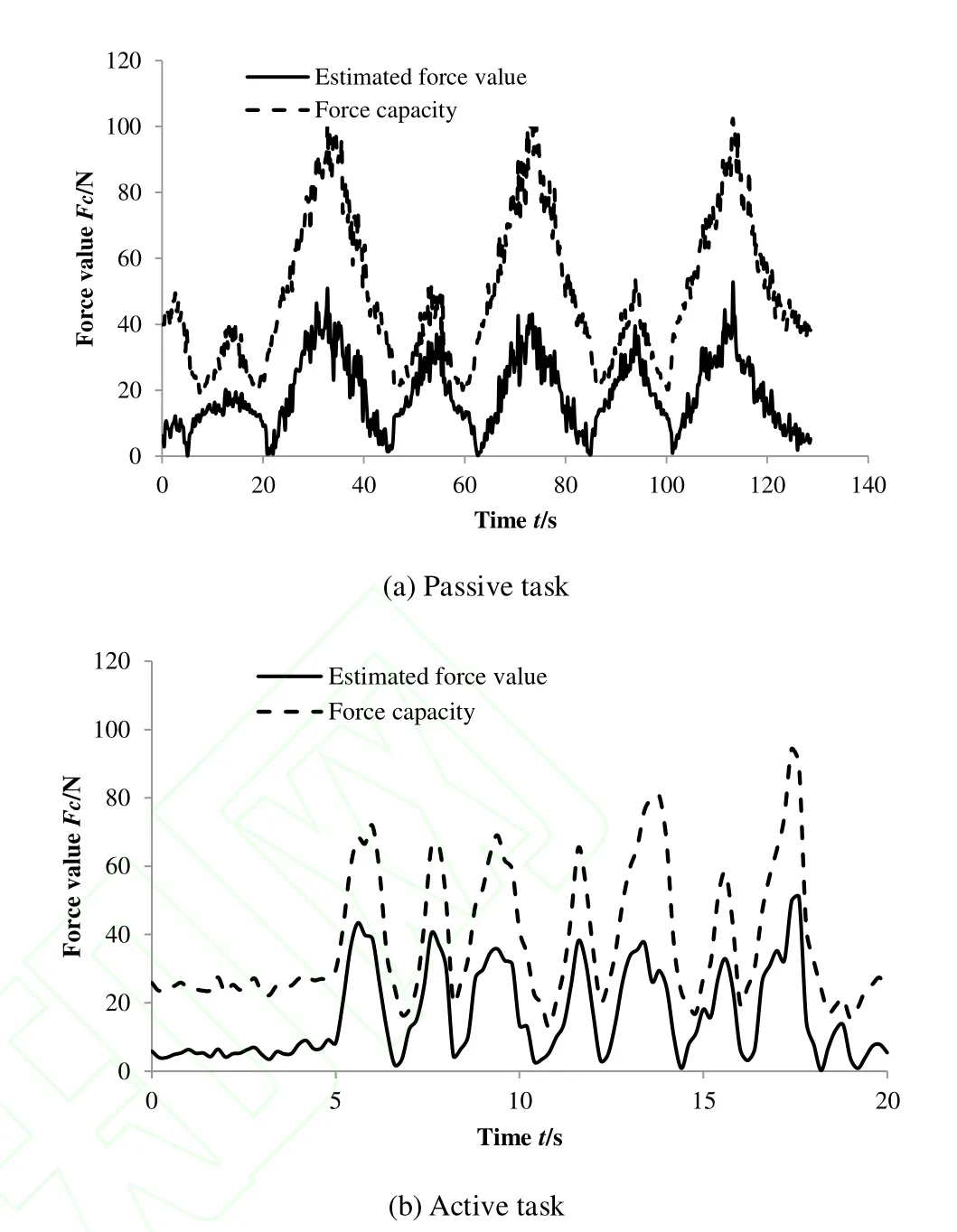
Fig. 9. Estimation of the total force capacity with the EMG signals in two steering modes for subject S1
4.2 Estimation methods of steering efficiency
Based on the analyses above, it can be found that the effective steering force value and total force capacity of driver could be estimated by means of the EMG signals.The effective steering work of driver was generated by this effective steering force, while the total power was generated by the total force capacity in steering. Therefore,the estimation of the steering efficiency of driver in steering maneuver was enabled through the estimation of the effective steering force and total force capacity.
4.2.1 Estimating efficiency
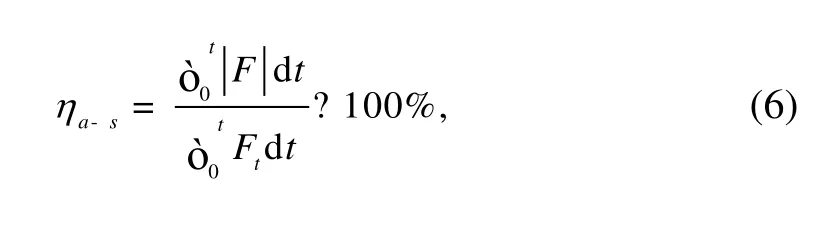
In this section, the estimation of the steering efficiency of driver in the time scale would be discussed. The effective steering force and total force capacity of driver vary with the steering process. Hence, the steering efficiency of driver varies in the time scale. And this efficiency could be judged with the ratio of the effective steering force and total force capacity, because the relative size of works generated by these two forces only relates to the force values. The steering efficiency could be expressed as follows:

where F is the effective steering force of driver calculated from Eq. (2). Ftis the total force capacity calculated from Eq. (4).
An example of the estimation results is shown in Fig. 10.It can be seen that steering efficiency varied as a periodic variation with the periodic variation of steering maneuver.In the passive steering, the low troughs of the efficiency appeared at the moment when the disturbed force was 0 N · m, and the high peaks appeared at the moment when the disturbed force was at its high peak. In the active steering, the low troughs of the efficiency appeared at the moment when the steering wheel was in its neutral position,and the high peaks appeared at the moment when the steering force was at its high peak.
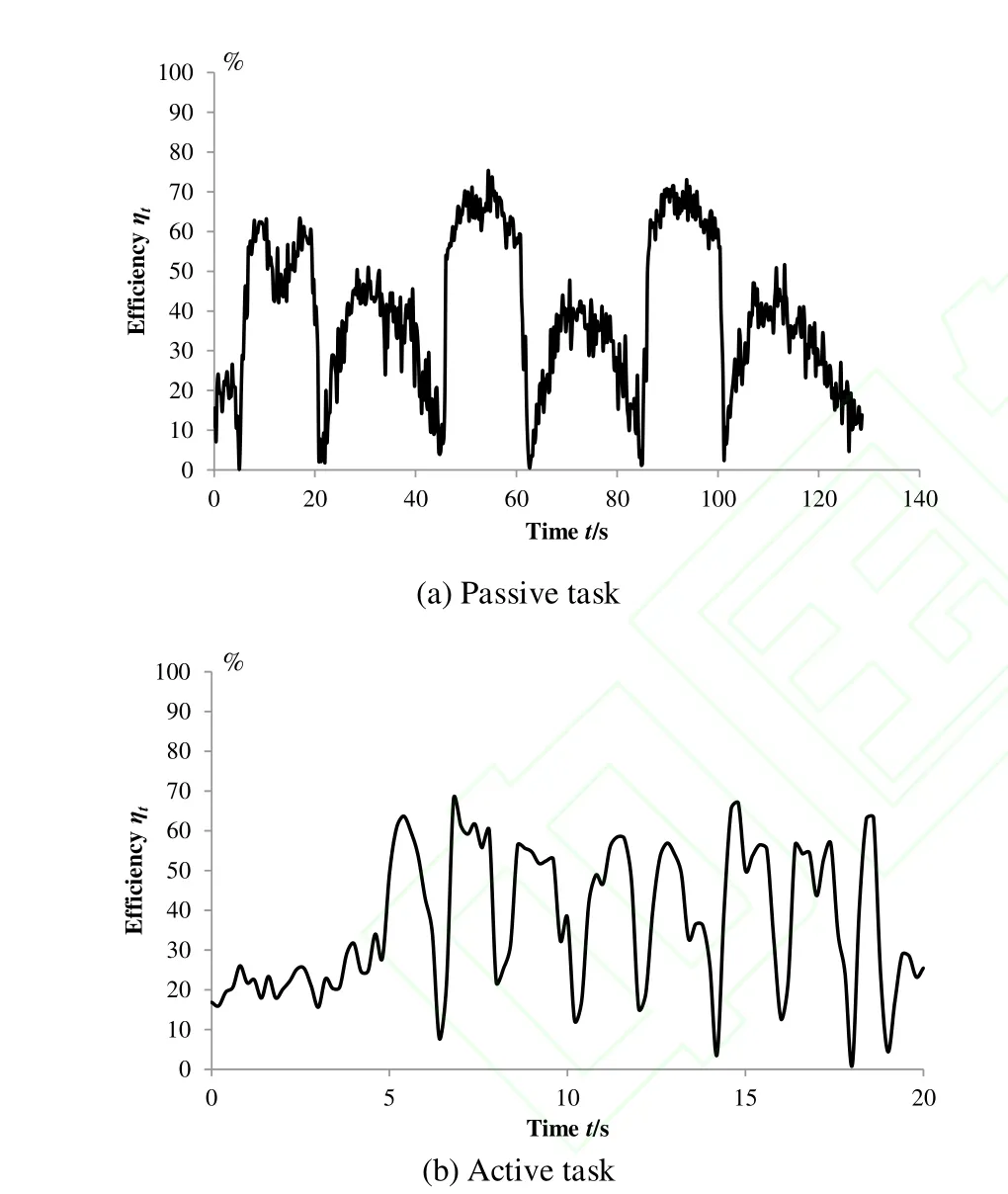
Fig. 10. Estimation of the steering efficiency in two steering modes for subject S1
4.2.2 Estimating efficiency in task scales
What is much desired is the efficiency in one certain steering maneuver, because this efficiency would be much more useful when evaluating the steering comfort or steering system characteristics. The average steering efficiency in steering maneuver could be expressed as follows:
where t is the steering time.
An example of the estimation results about the experiments in this paper is shown in Table 6 and Fig. 11.Fig. 11 illustrates the average efficiency of steering maneuver in the time scale. Based on the result, it can be seen that the efficiency of the active steering (turning the vehicle) was somewhat higher than that of the passive steering (keeping straight driving). It means that, the average efficiency when the driver turned the vehicle with an expecting purpose was higher than the average efficiency when the driver counteracted an unknown disturbing from the driving environment to keep the straight driving.

Table 6. Average efficiency of S1
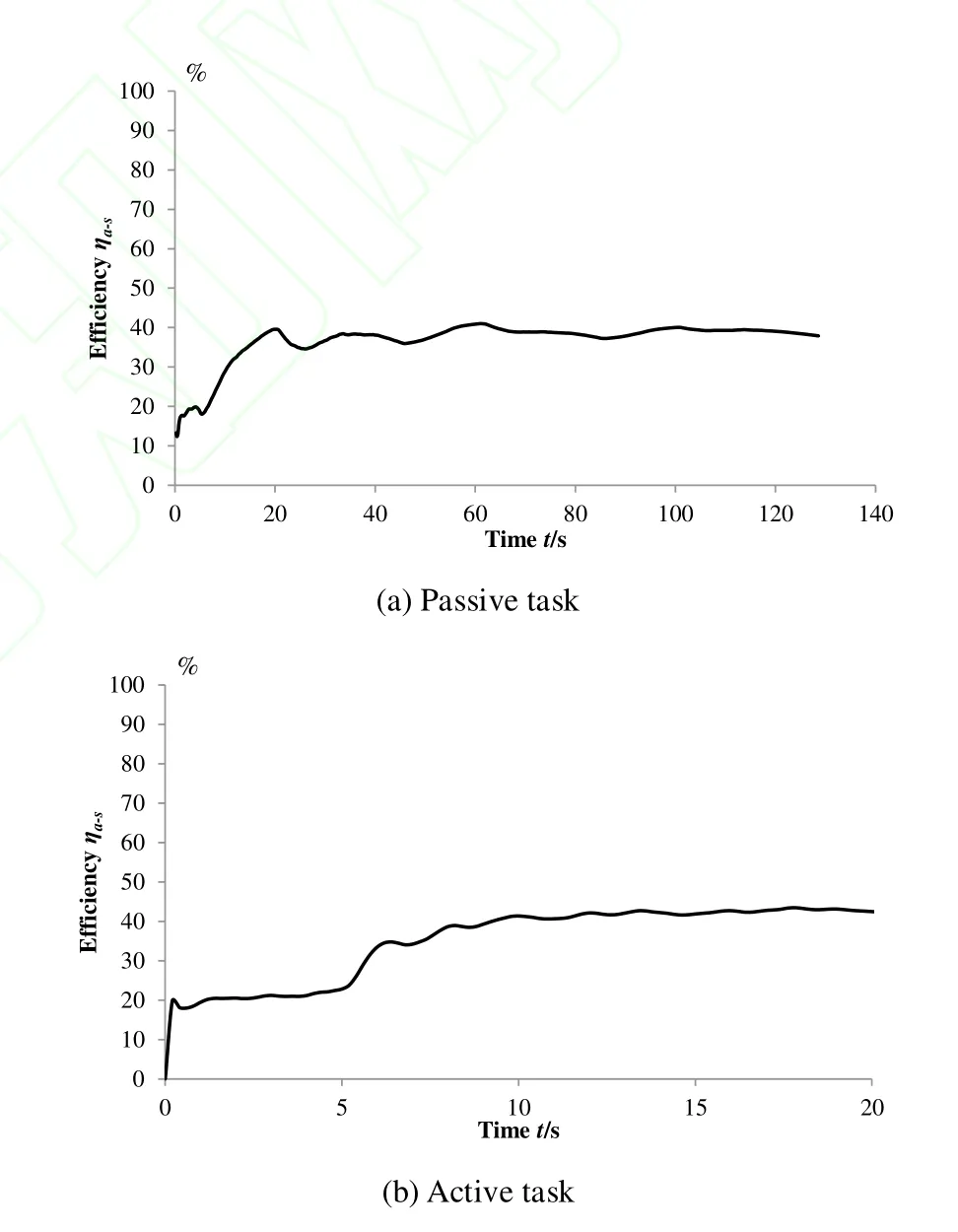
Fig. 11. Estimation of the average steering efficiency in two steering modes for subject S1
Form Fig. 11, it can also be seen that, the average steering efficiency of the driver would be almost constant with the periodic variation of steering maneuver. And the average efficiency was approximately in a constant value in all steering modes when keeping the steering wheel in its neutral position (with no steering movement), this constant value in Fig. 11 was approximately 20% and it was exactly the efficiency that the driver counteracted the gravity to keep the upper limb posture.
5 Conclusions
(1) This study showed that the EMG signals could be helpful when the steering efficiency of the driver was estimated. What is much desired are these parameters related to the total work, including the stabilization work for keeping body posture or other aims in which is difficult to be evaluated in a unitary scale and has none significance(it relates much to the driver individual factors such as the somatotype). Therefore, this paper studies the efficiency related to turning the steering wheel to steer the vehicle.This steering efficiency of driver was of very important significance, although it only relates to “turning the steering wheel” in steering maneuver but not the efficiency of the total work driver produced (including the stabilization work for keeping the body posture and others except turning the steering wheel).
(2) The important basis of this estimation method is the principle of the contraction force of the muscle and muscle activity in kinesiology that the force generated by the muscle contraction has a linear relation to its EMG signal.Based on this principle, the estimation formulas of the effective steering force and total force capacity (relates to turning steering wheel) were obtained with the EMG signals through the multiple regressions.
(3) The estimation of the efficiency in the two experiments in this study showed that, the efficiency of the passive steering was lower than that of the active steering.One probable explanation is that: in the passive steering the driver should stabilize the steering wheel against the unknown disturbed force; therefore the driver should be in a nervous situation to contract the muscle in advance.Consequently, the much more inefficient work generated.
(4) An estimation method of the steering efficiency of driver was obtained in this study. This method could be helpful to evaluate the steering comfort of driver objectively, and the characteristics of steering system. It could also be used in other maneuvers of driver in the“driver-vehicle-road” system.
[1] ZHANG X, SHI G B, LIN Y. Objective evaluation of electric power steering feel[J]. Journal of Mechanical Engineering, 2009, 45(6):171–175. (in Chinese)
[2] LIN YI, ZHANG XIN, SHI GUOBIAO, et al. Subjective evaluation method study on vehicle steering feeling[J]. Journal of Highway and Transportation Research and Development, 2007, 24(2): 130–134 (in Chinese)
[3] SHI GUOBIAO, ZHANG XIN, LIN YI. Subjective fuzzy evaluation of steering feel for electric power steering system[J]. Journal of Jilin University(Engineering and Technology Edition), 2007, 37(4):751–755. (in Chinese)
[4] NORMAN K D. Objective evaluation of on-center handling performance[C]//International Congress and Exposition, Detroit,America, Feb 27–Mar 2, 1984: SAE Paper 840069.
[5] JONSSON S, JONSSON B. Function of the muscles of the upper limb in car driving[J]. Ergonomics, 1975, 18(4): 375–388.
[6] JONSSON S, JONSSON B. Function of the muscles of the upper limb in car driving-IV: the pectoralis major, serratus anterior and latissimus dorsi muscles[J]. Ergonomics, 1975, 18(6): 643–649.
[7] JONSSON S, JONSSON B. Function of the muscles of the upper limb in car driving-V: the supraspinatus, infraspinatus, teres minor and teres major muscles[J]. Ergonomics, 1976, 19(6): 711–717.
[8] Macadam C C. Understanding and modeling the human driver[J].Vehicle System Dynamics, 2003, 40(1): 101–134.
[9] PICK A J, COLE D J. Neuromuscular dynamics and the vehicle steering task[J]. Vehicle System Dynamics, 2003, 41(Suppl.):182–191.
[10] KEEN S D, COLE D J. Steering control using model predictive control and multiple internal models[C]//The 8th International Symposium on Advanced Vehicle Control, Taipei, China, 2006:AVEC060095.
[11] PICK A J, COLE D J. Neuromuscular dynamics in the driver-vehicle system[J]. Vehicle System Dynamics, 2006, 44(Suppl.): 624–631.
[12] PICK A J, COLE D J. Driver steering and muscle activity during a lane-change manoeuvre[J]. Vehicle System Dynamics, 2007, 45(9):781–805.
[13] COLE D J. Steering feedback-mathematical simulation of effects on driver and vehicle[J]. ATZ auto technology, 2008, 8: 2–6.
[14] PICK A J, COLE D J. A mathematical model of driver steering control including neuromuscular dynamics[J]. Journal of Dynamic Systems, Measurement, and Control, 2008, 130(3): 1–9.
[15] PICK A J, COLE D J. Dynamic properties of a driver’s arms holding a steering wheel[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2007, 221:1475–1486.
[16] PICK A J, COLE D J. Measurement of driver steering torque using electromyography[J]. Transactions of the ASME, 2006, 128:960–968.
[17] LIU YAHUI, JI XUEWU, HAYAMA RYOUHEI, et al. Research on EMG signals of shoulder and upper limb muscles within steering maneuvre - Part 1: identification of the main muscles and their roles[C]//First International Symposium on Future Active Safety Technology toward zero-traffic-accident, Tokyo, Japan, Sep 5–9,2011: paper number TS2-8-1-3.
[18] HAYAMA RYOUHEI, MIZUNO TAKAHIRO, LIU YAHUI, et al.Research on EMG signals of shoulder and upper limb muscles within steering maneuvre - Part 2: identification of the activation order[C]//First International Symposium on Future Active Safety Technology toward zero-traffic-accident, Tokyo, Japan, Sep 5–9,2011: paper number TS2-8-1-4.
[19] LIU Yahui, JI Xuewu, HAYAMA RYOUHEI, et al. Function of shoulder muscles of driver in vehicle steering maneuver[J]. Science China Technological Sciences, 2012, 55(12): 3445–3454.
 Chinese Journal of Mechanical Engineering2014年3期
Chinese Journal of Mechanical Engineering2014年3期
- Chinese Journal of Mechanical Engineering的其它文章
- Theoretical Analysis and Experimental Verification on Valve-less Piezoelectric Pump with Hemisphere-segment Bluff-body
- Carbody Structural Lightweighting Based on Implicit Parameterized Model
- Prediction-based Manufacturing Center Self-adaptive Demand Side Energy Optimization in Cyber Physical Systems
- Effectiveness of a Passive-active Vibration Isolation System with Actuator Constraints
- Numerical Simulation and Analysis of Power Consumption and Metzner-Otto Constant for Impeller of 6PBT
- Proceeding of Human Exoskeleton Technology and Discussions on Future Research