
光电探测器调焦机构的设计与精度分析
2014-03-20 08:51高云国
激光与红外 2014年11期
占 潜,高云国,于 萍
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院大学,北京100049)
约为1。
1 引言
光电探测技术作为现代信息技术的前端,广泛应用在人类生活的各行各业之中。在对目标进行跟踪捕获的过程中,要想获得高清晰度的图像,目标必须准确地成像在CCD的感光面上。如果调焦不正确,会造成像点离散,降低目标和背景的对比度,从而影响设备的作用距离和成像质量。因此调焦机构是探测系统的重要组成部分,调焦系统的精度直接影响到光学系统的成像[1-2]。
本课题针对项目的参数要求,在常用的调焦机构基础之上,基于密珠轴系回转精度高、摩擦力矩小、承载能力大等优点,在保证相机的成像质量的前提下,设计了一种新型调焦机构。介绍了其组成及工作原理,详细分析了其误差来源及精度,最后对其进行了精度检测和实验论证。
2 调焦机构的设计
2.1 参数要求
为在保证分辨率、作用距离满足要求前提下,尽量增大捕获视场,光电探测器选择加拿大DALAS公司的1M60相机,该相机的特点是靶面大,灵敏度高。其调焦系统的设计要求如下:
(1)工作温度:-40~ +45℃
(2)光学设备振动范围:16~60 Hz,加速度为1.5 g
(3)调焦晃动精度≤2″
2.2 调焦方式的选择[3-5]
光电探测器的调焦方式主要取决于光学系统、结构形式以及调焦精度的要求。常用的调焦方式有三种:焦平面移动式、焦面反射镜移动式和镜组移动式。焦平面移动式是最直接的调焦方式,即调整焦平面的位置使其与像面重合。但在实际应用中往往受到机构的运动精度和结构尺寸的制约而难以实现。焦面反射镜移动调焦即通过调整折转光路的反射镜来实现调焦,适用于反射式系统中。镜组移动式是在光学系统中通过调整透镜的位置来改变透镜间的间距,从而达到调焦的目的。根据本探测器光学系统的结构特点,本文选择了镜组移动式的调焦方式,通过调整调焦镜组位置来实现像面位置的校正。
2.3 调焦机构的设计[6-8]
一般的调焦结构设计主要有以下两种:
a.凸轮调焦方式
凸轮传动调焦方式的结构和装配工艺简单,凸轮、齿轮等运动件表面经特殊处理后无冷焊、无卡滞现象,有很好的抗冲击振动能力。但对凸轮曲线加工精度要求较高,导致生产成本增高。
b.丝杠螺母调焦
丝杠螺母调焦方式的结构比较简单,体积小,重量轻,便于加工且成本低。但是容易产生卡滞现象,抗振动冲击的能力差,且调焦精度低,稳定性差。
此外,有的调焦机构还采用了蜗轮蜗杆调焦方式。其特点是可以产生较大的传动比,缺点是体积大、质量重。
通过对这几种调焦机构的设计对比,根据现有的加工能力以及调焦方式的精度要求,本文最终选用了一种由齿轮传动配合螺旋传动的密珠轴系直线运动系统。其主要零部件如图1所示。

图1 调焦系统结构图Fig.1 Structure diagram of the focusingmechanism
调焦镜通过压圈安装在镜筒内,调焦镜筒外圆面及固定筒内孔面为经过特殊处理的滚道,借助于保持架保证钢球处在滚道内的相对位置。精密钢球经过盈配合装配在滚道内,相对内外滚道沿光轴的平行方向滚动,沿光轴方向旋转运动被限,并通过直线电位计标记调焦镜位置。电机带动小齿轮旋转,同时驱动大齿轮转动,螺母与主轴间通过钢球与轴套及限位实现主轴带动调焦镜作直线运动,从而实现调焦镜组件借助于精密钢球相对固定筒沿光轴作平移运动的功能。
这种结构主轴主要有以下几种特点:(1)机构紧凑;(2)刚度好;(3)由于钢球和内外圈有较高的加工精度以及误差均匀化作用,运动精度高。
最终加工出来的调焦机构实物如图2所示。
式中,δ1为轴套的单边变形;δ2为主轴的单边变形;δ为滚珠与主轴或轴套的接触变形,当近似考虑:δ1=δ2= δ时,过盈量为 Δ =8δ。
我们国家对密珠轴系推荐采用的过盈量一般为Δ=0.002~0.004 mm,根据加工条件及实际要求,本结构采用过盈0.003 mm装配。故:
Δ =8δ=0.003 mm
求得滚珠与主轴的接触变形:
δ =3.75 ×10-4mm
根据赫兹理论,两个具有曲率的滚动体接触时,在负荷作用下产生的接触面为椭圆形,其点接触处的两接触滚动体变形量为:

图2 调焦机构实物图Fig.2 Real figure of the focusingmechanism
3 调焦机构计算分析
3.1 调焦机构分辨率计算
CCD相机半焦深为0.015 mm,调焦机构的分辨率处在1/3半焦深,为0.005 mm以内,能够很好地实现调焦功能。选择电机每转细分400份,螺母转一转调焦镜移动2 mm,齿轮传动比为3,所以螺母转一转,电机转3转,调焦镜分辨率:
2 mm/(3 ×400)=0.0017 mm <0.005 mm
满足调焦分辨率要求。
3.2 调焦机构力学分析计算[9-10]
密珠轴系的主轴、滚珠和轴套采取过盈配合,适当选取过盈量,可以减小零件加工误差的影响,提高轴系的回转精度。
过盈量计算公式如下:

式中,dw为主轴外径;dn为轴套内径;d为钢球直径。过盈量又是轴套、主轴以及滚珠三者的变形之和,即:


其中,∑Q=Q11+Q12+Q21+Q22代表曲率和,单位1/mm;Q的两个下标,第一个代表物体,第二个代表主曲率面,主曲率面为有最大和最小曲率值相互垂直的两个面,且曲率中心在物体内为“+”,物体外为“-”。
②按照变压器检修规程的要求,在进行变压器抽真空期间,要求变压器内部真空度为4mbar以下,变压器内部各处压力均相等,并且要求保持真空至少48H;
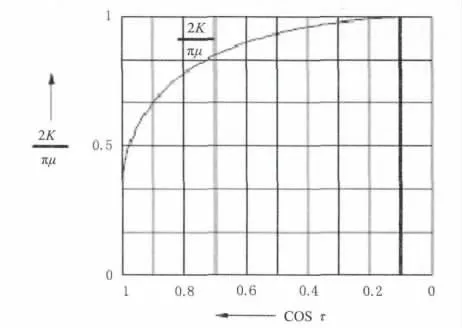
图3 赫兹系数曲线Fig.3 Curve of Hertz coefficient

约为1。
主轴、轴套和钢球的材料选用40Cr,钢球直径为9 mm,主轴的直径为74 mm,材料的正弹性模量E=211 GPa,泊松系数ν=0.3,通过以上公式可以计算出单个钢球受力:

本轴系每周分布6个滚珠,主轴共有54个滚珠。调焦时主轴沿轴向直线运动,与滚珠之间存在滚动摩擦,取滚动摩擦系数f=0.01,得出主轴轴向受到的摩擦阻力:

根据调焦系统的参数要求以及现有的实验室电机设备,选择实验室常用的一种驱动电机,型号为:SS1704A20A;电机的外形尺寸:42.3 mm×
带入得:
cosτ=0.057 ,查得此时42.3 mm ×49.5 mm,静力矩为 0.54 Nm;步距角为1.8°;启动电流为2 A 。
电机输出轴上的齿轮z1=37;与z1啮合的大齿轮z2=111;(齿轮压力角 α =20°;模数m=1),螺母和主轴的螺纹配合传动比为i=z2/z1=3。
Vz为主轴和调焦镜直线运动速度,螺纹副螺距2 mm,调焦镜调焦范围3 mm,在1 s内完成调焦:

n为电机轴的转速,n=(3/2)×3×60=270 rpm,由电机力矩与转速特性曲线知道此时电机转矩 t0=0.49 Nm,齿轮传动效率 η =0.98,故电机输出到大齿轮上的转矩:

电机带动小齿轮z1旋转,同时驱动大齿轮z2转动,大齿轮与螺母一体,螺纹副输入力矩与输出的轴向力计算公式近似为:

式中,K为拧紧力系数,一般取 K=0.1~0.3,对于M70 螺纹,取 K=0.2,代入得 F=102.9 N ,大于运行时受到的摩擦阻力,由此可以看出电机满足设计要求。
3.3 调焦机构晃动精度分析
轴系在竖直平面内的晃动误差主要是由于轴系和滚珠的不圆度引起的。其最大晃动误差可由以下公式近似计算:

式中,ΔD为不圆度值,设计时钢球采用零级精度,参照GB/T 308-2002,滚珠的不圆度值为0.00025mm。加工时主轴的不圆度值为0.0010 mm,轴套的为0.0025 mm。由于滚珠与主轴均位于轴套内,而轴比孔更易加工出较高精度,故取 ΔD=0.0010 mm;L为钢球在轴向上的最大跨距,L=100 mm;K'为负载变形系数,一般取 K'=0.4~0.96,此处取K'=0.5。计算得:σmax=1.03″,满足调焦机构设计要求。
4 调焦机构试验
4.1 调焦机构振动实验
调焦机构的模态要求是对其进行结构设计的基本要求,取决于机构自身的刚度。利用振动实验对调焦机构进行模态分析,可以避免其在工作时达到共振影响机构精度。
项目要求光学设备工作振动频率在16~60 Hz,为了确保调焦机构在工作频率范围内不会因为共振而破坏机构精度,在振动实验台上对调焦机构进行1.5 g正弦振动试验,振动方向垂直轴向。实验如图4所示。

图4 调焦机构振动实验Fig.4 Vibration experiment of the focusingmechanism
实验得出的调焦机构频率响应曲线如图5所示。

图5 调焦机构频率响应曲线Fig.5 Frequency response curve of the focusingmechanism
从曲线图可以看出,在要求的工作频率范围内该调焦机构结构力学特性好,不会出现共振,能够平稳地运行,具有良好的刚度,满足工作需求。
4.2 振动前后晃动实验
由于本调焦机构采用的是镜组移动式的调焦方式,调焦组镜的晃动量是影响调焦效果的主要因素,故本文主要对调焦机构进行晃动精度实验分析,实验如图6所示。

图6 隔振台调焦机构晃动实验Fig.6 Shaking precision experiment of the focusingmechanism
为了验证在振动前后调焦系统的精度是否受到影响,在常温下对调焦机构振前和振后进行晃动精度实验对比。
将调焦系统置于隔振台上,用0.2″自准值平行光管作为检测工具,通过平行光管读取平面镜成像的数据。用计算机进行编程驱动电机转动,带动主轴进行直线运动,每运行1 mm进行一次计数,分别记录机构在运行过程中水平方向和垂直方向上的晃动量。实验数据整理之后的曲线图如图7和图8所示。

图7 振动前后水平方向晃动精度实验数据对比Fig.7 Curve of horizontal shaking precision after vibration

图8 振动前后垂直方向晃动精度实验数据对比Fig.8 Curve of vertical shaking precision after vibration
由图7、图8可知,使用0.2″自准值平行光管作为检测量具,可以看出在要求的振动频率范围内调焦系统能够保持较高精度,水平方向和垂直方向上的最大晃动量均在2″以内,满足光学设备的精度要求。
5 结论
根据探测器总体技术指标要求,本文设计了一种密珠轴系调焦机构,将电机转动转化为主轴沿轴向的高精度直线运动,从而调整透镜组的位置来实现像面位置的校正。最终加工出来的调焦机构外形尺寸为200 mm×200 mm×140 mm。通过对该机构进行振动实验和晃动精度实验可知,该调焦机构具有一定的刚度,在要求的工作振动频率内能够很好地实现调焦功能,晃动精度小于2″。总体来说,该机构具有结构紧凑、运行平稳、晃动精度高等特点,满足系统的设计要求,同时也为密珠轴系在探测器调焦系统中的应用提供了范例。
[1] JIANG Hanyuan,LIXuelei,ZHANG Tao,et al.Research on automatic focusing system for theodolite'image measurement[J].Computer Measurement and Control,2010,18(1):183 -185.(in Chinese)蒋汉元,李雪雷,张涛,等.光电经纬仪图像测量中的自动调焦系统研究[J].计算机测量与控制,2010,18(1):183-185.
[2] GAO Fei,ZHANG Bao,LIU Dayu.Study on the test for a kind of Aerospace Remote Sensor's Focusing Structure[J].Journal of Changchun University of Science and Technology:Natural Science Edition,2008,31(2):30 -32.(in Chinese)高飞,张葆,刘大禹.一种航天遥感器调焦机构实验研究[J].长春理工大学学报:自然科学版,2008,31(2):30-32
[3] AN Yuan,QIYingchun.Design of Straight- line focusing mechanism for space camera[J].Optics and Precision Engineering,2009,17(3):609 -614.(in Chinese)安源,齐迎春.空间相机直线调焦机构的设计[J].光学 精密工程,2009,17(3):609-614
[4] SHAOMingdong,GUO Jiang,SUN Jiming.Design of focusingmechanism for off- axis TMA mapping cameras[J].Chinese Optics,2012,5(4):373 -379.(in Chinese)邵明东,郭疆,孙继明.离轴三反测绘相机调焦机构的设计[J].中国光学,2012,5(4):373 -379.
[5] DING Yalin,TIAN Haiying,WANG Jiaqi.Design on the focusing mechanism of space remote-sensing camera[J].Optics and Precision Engineering,2001,9(1):35 -38.(in Chinese)丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].光学 精密工程,2001,9(1):35 -38.
[6] ZHANG Xinjie,YAN Changxiang,XIE Tao.Design of fo-cusingmechanism of space remote sensor[J].Optics and Precision Engineering,2009,17(11):2757 - 2761.(in Chinese)张新洁,颜昌翔,谢涛.星载光学遥感器调焦机构的设计[J].光学 精密工程,2009,17(11):2757 -2761.
[7] JIA Xuezhi,WANG Dong,ZHANG Lei,et al.Optimizing design and precision experiment of focusingmechanism in lightweight space camera[J].Optics and Precision Engineering,2011,19(8):1824 -1830.(in Chinese)贾学志,王栋,张雷,等.轻型空间相机调焦机构的优化设计与精度试验[J].光学 精密工程,2011,19(8):1824-1830.
[8] HUANG Heping,XIA Yinhui,AN Chengbin,et al.Design on the focusing mechanism of long focus IR system[J].Laser& Infrared,2005,35(10):745 -747.(in Chinese)黄和平,夏寅辉,安成斌,等.大口径、长焦距红外系统调焦机构设计[J].激光与红外,2005,35(10):745-747.
[9] MAO Shuyue.Design andmanufacture of closed-packed ball bearings[J].Journal of Chinese Inertial Technology,1991,1:73 -79.(in Chinese)毛书越.密珠轴系的设计与制造[J].中国惯性技术学报,1991,1:73 -79.
[10] LIU Ying.Fundamentals of Mechanical Design[M].Beijing:Central Radio & TV University Press,2006.(in Chinese)刘颖.机械设计基础[M].北京:中央广播电视大学出版社,2006.
猜你喜欢
水电站机电技术(2020年1期)2020-02-28
制造技术与机床(2019年11期)2019-12-04
时代汽车(2019年6期)2019-07-09
水电与抽水蓄能(2019年1期)2019-03-08
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
现代工业经济和信息化(2016年4期)2016-05-17
深圳职业技术学院学报(2015年5期)2015-11-30
空间控制技术与应用(2015年1期)2015-06-05
现代电子技术(2009年9期)2009-06-25
