
激光半主动比例导引头光学系统分析与设计
2014-03-27 02:03李福巍张运强潘国庆
应用光学 2014年6期
李福巍,张运强,2,潘国庆,2
(1.中国空空导弹研究院,河南 洛阳471009; 2.航空制导武器航空科技重点实验室,河南 洛阳471009)
引言
激光半主动制导是激光制导体系中发展最早、技术最成熟、应用较广泛的一种制导方式。它的工作过程是利用独立的激光照射器照射指定目标,由弹上导引头接收目标反射的激光回波信号,根据目标在探测器上的能量分布,判别目标的偏离方向及位置,形成制导指令,使导弹准确地飞向目标。其主要特点是制导精度高,有较高的命中率;结构较简单,成本较低,对信息处理系统要求较低;抗干扰能力强,能在较复杂的人为干扰及背景干扰中实现对目标的识别和跟踪。因此,该种武器得到广泛的应用。目前,国际上很多先进的导弹和航空炸弹都采用这种工作方式,如美国的“海尔法”反坦克导弹、“幼畜”AGM-65E空地导弹、法国的AS-30L导弹、日本的KAM-10导弹、西班牙的TOLEDO导弹和美国的“宝石路”系列航空炸弹等。
由此可见,激光半主动制导武器的研究对提高国家防御能力,增强部队战斗力有着重要的意义。而光学系统作为激光半主动制导武器的主要组成部分,起到接收和会聚由目标反射回来的激光能量的作用,它的性能好坏直接影响到导引头的作用距离和搜索能力等重要指标,对此方向的研究同样有着重要的意义,可以为激光半主动比例导引武器的研制奠定坚实的基础。
1 激光半主动比例导引头探测原理
1.1 四象限探测原理

当导引头工作时,光学系统接收并会聚目标漫反射的激光光束,在探测器上形成圆形光斑,光斑使每个象限都输出一个信号,通过对各个象限输出信号的处理可以得到目标位置的误差信号。光斑位置的不同,将形成大小不同的误差信号。位置误差信号可以分为水平方向(Y方向)误差信号和俯仰方向(Z方向)误差信号。
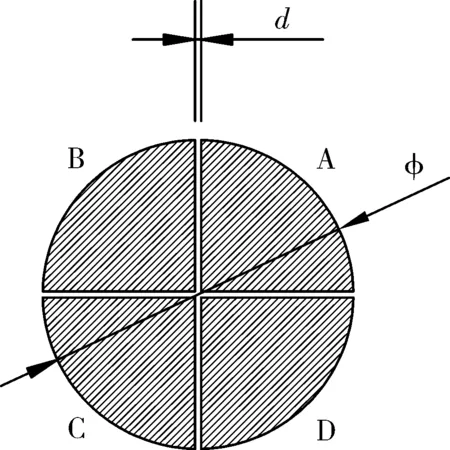
图1 四象限探测器示意图Fig.1 Diagram of four-quadrant detector
当光学系统光轴对准目标的时候,圆形光斑的中心与四象限探测器的中心重合,如图2(a)所示。此时探测器的4个象限因受照射的光斑面积相同,输出相等的脉冲电压,经过后面的处理电路后,没有误差信号输出。
当目标相对光轴有偏移时,如图2(b)所示,目标在探测器上所成像的圆形光斑的中心相对与探测器的中心有一定的偏移,此时探测器的4个象限受照射的光斑面积不同,从而输出的脉冲电压的幅度也不相同。定义4个象限输出的信号为VA、VB、VC、VD,进行和差运算,可以得到代表光斑沿Y、Z方向的偏移量所对应的值UY、UZ,其中:
UY=K[(VA+VD)-(VB+VC)]
(1)
UZ=K[(VA+VB)-(VC+VD)]
(2)
式中K为电路放大系数。
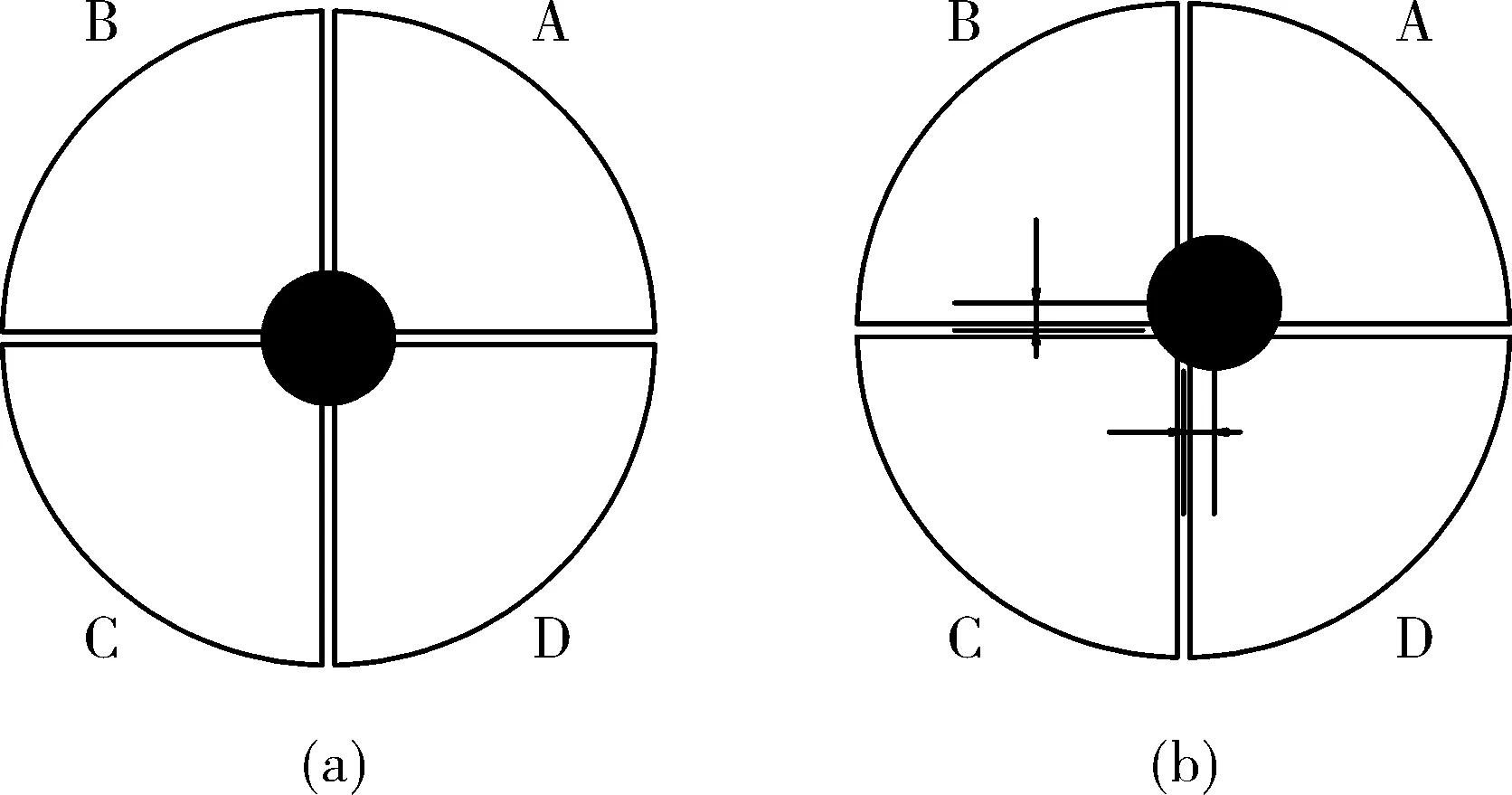
图2 四象限探测器工作原理图Fig.2 Operational principle diagram of four-quadrant detector
在实际应用中,各象限输出的电压量与接收到的目标反射能量有关,而目标反射能量是随弹体到目标的距离变化而改变的,这增加了对后续电路动态范围的要求。为了消除目标与弹体之间的距离变化引起的光斑总能量的变化对计算的影响,一般采用归一化的和差比幅计算方法,则UY、UZ表示为
(3)
(4)
在根据(3)式和(4)式计算出目标相对于视线的偏差之后,经后续电路处理,形成制导指令,调整弹体飞行方向,准确地命中目标。
1.2 光学系统特点
通过以上对激光半主动比例导引头工作原理的分析,可以看出这种光学系统有以下特点:
1) 对成像光斑的质量要求较高,一方面要确保光斑的圆度,不要有较大的变形;另一方面要使其能量分布均匀,不能让能量集中在某一个部位。
2) 对于一些有线性区要求的系统,还要确保光斑在一定视场内有固定的直径。
3) 较大的相对孔径,一般F数都小于1。
4) 对于单色光成像,使用窄带滤光片,降低背景噪声。
2 光学系统设计
2.1 设计指标
光学系统的技术指标要求如下。
1) 工作波段:1.064 μm;
2) 瞬时视场:±3°;
3) 入瞳直径:50 mm;
5) 线性区:±1°。
由探测器的光敏面积和视场角可以确定系统的焦距为38 mm;同时,根据系统±1°的线性区要求,经计算取成像光斑的直径大小为1.5 mm。
2.2 设计方法
由于这种光学系统的设计要求与多数成像光学系统的设计要求有较大差别,在软件使用方面也带来较大的困难。因为,在通常的成像光学系统设计中,对其设计结果的分析主要是考察系统的MTF或是能量圆的大小等技术指标,对于光斑的形状及能量分布要求不大。因此,对于常用的光学设计软件,如CodeV,其中的优化模式都是使系统的误差函数值最小,如点列图均方根误差、波前差等,而未考虑较大成像光斑情况下的优化。所以,若要直接应用软件中的优化函数,很难得到设计者所需要的结果。所以,提出一种结合Zernike多项式的优化设计方法,可以方便地得到所需的设计结果。
该方法的基本原理是基于Zernike多项式,建立特殊的CodeV优化宏函数的设计方法。Zernike多项式是描述干涉图的波前像差的常用方法,多项式的形式为rncos(mθ)和rnsin(mθ),是以半径和方位角定义的极坐标形式表示的多项式。Zernike多项式具有如下2个主要特点:
1) 在单位圆上正交,即有如下关系:
(5)
2) Zernike多项式与Seidel像差项相互对应
Zernike多项式和光学设计者惯用的Seidel像差系数很容易建立起联系,为有选择地单独处理各像差系数,优化系统性能提供有效的方法。在应用广泛的成像光学系统设计软件Code V中就定义了两种Zernike多项式,标准Zernike多项式(ZRN)和Fringe Zernike多项式(ZFR)。Fringe Zernike多项式在一些干涉图软件里得到广泛应用,最多可有37项,是标准Fringe Zernike多项式的子集。Zernike多项式可以精确地描述系统的波像差,并且其每一项都对应很明确的物理含义,对应于各种像差的某些项。Fringe Zernike多项式的前9项多项式在表1中给出。在图3中显示根据Fringe Zernike多项式的公式仿真出来的波前图形。
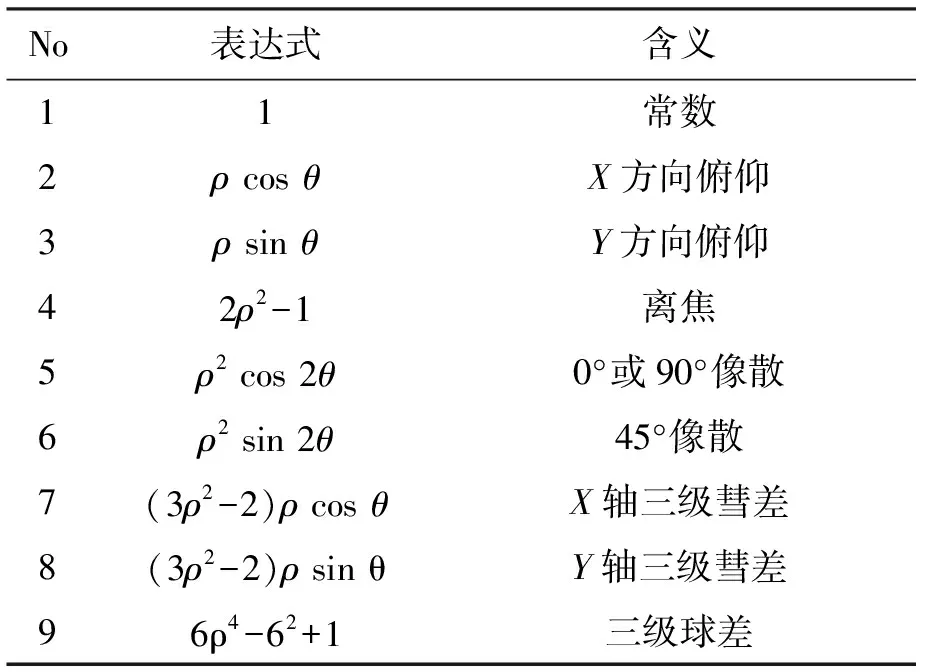
表1 Fringe Zernike多项式前9项对应的像差种类Table 1 Aberration types of first 9 items of the Fringe Zernike polynomials
通过Matlab计算得到Zernike多项式中不同项对应的波前图。从图3中可以看出,除离焦以外其他像差对光斑质量有较大的影响,因此,考虑离焦像差远大于其他像差时,可以忽略其影响,从而保证光斑的质量,即多项式中带有较大的离焦像差。
由图3可见,Zernike多项式和光学系统的像差有较好的对应关系,因此,可以在系统的优化设计过程中,用Zernike多项式模拟一个带有较大垂轴球差的波前,叠加在入射波面上,然后对系统进行优化,通过调整加入垂轴球差的大小来控制成像光斑的大小及光斑的均匀性,从而得到满足指标要求的光学系统。在Code V软件中,可以通过宏函数调用一个Zernike多项式插入到入瞳的位置,即叠加到波前。其中,优化宏函数的主要流程如图4所示。


图3 Zernike 多项式中不同项得到的波前图Fig.3 Different waterfront plots when Zernike polynomials are different
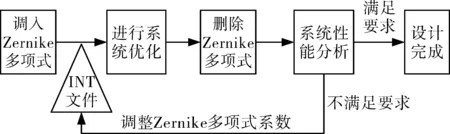
图4 优化宏函数流程图Fig.4 Flow chart of macro function
3 设计结果分析
3.1 光学系统结构
通过以上的设计得到如下的光学系统,其光路图如图5所示。系统采用三片式结构,并在系统前面增加窄带滤光片,减小背景噪声的影响。光学系统具体参数见表2。
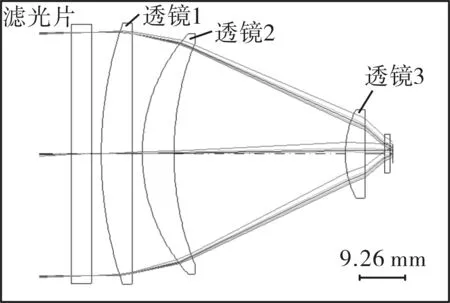
图5 光学系统图Fig.5 Optical system layout

表2 光学系统的具体参数Table 2 Parameters of optical system
3.2 光学系统光斑大小
利用CodeV光学设计软件对其进行性能分析,主要分析系统成像光斑的大小和能量的分布。
对其光斑大小进行分析,可以得到在不同视场的光斑大小,如表3所示。

表3 不同视场时光斑的大小Table 3 Spot size of each field
3.3 光学系统光斑能量分布
对其光斑的能量分布进行分析,得到系统在不同视场的点列图分布和在不同视场的照度分布,如图6和图7所示。
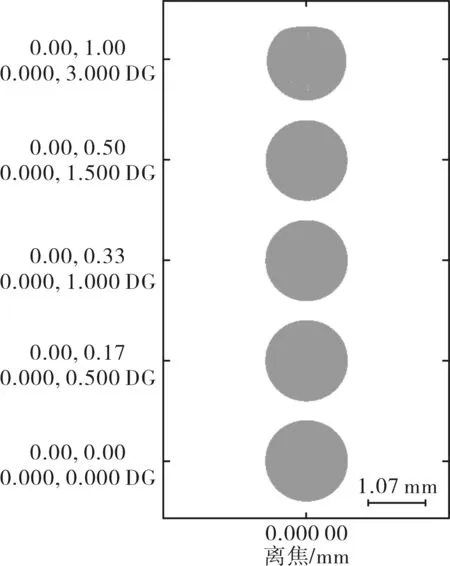
图6 不同视场时点列图分布Fig.6 Spot diagram of each fields
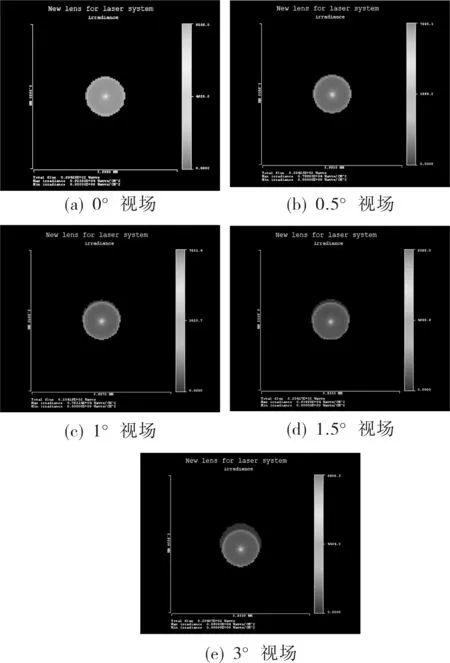
图7 不同视场时光斑照度分布Fig.7 Illumination distribution of each fields
通过对以上光学系统设计结果的分析,可以知道该光学系统满足系统设计指标,达到使用要求。
4 结论
针对激光半主动比例导引头光学系统的特点,提出结合Zernike多项式的优化设计方法,并设计一套1.064 μm的激光半主动导引头光学系统。通过对所设计系统的性能分析,证明了设计结果的正确性。
通过研究,一方面验证了结合Zernike多项式优化设计方法的可行性,另一方面对激光半主动比例导引头光学系统的特点和设计方法有了更深入的了解,为以后研制激光半主动比例导引武器奠定了坚实的基础。
[1] Wei Wenjian, Qin Shiqiao, Zhang Baodong, et al. Design on the optical system of laser semi-active seeking guided hardware-in-the-loop simulation seeker[J]. Infrared and Laser Engineering, 2008, 37(2): 322-325.
巍文俭, 秦石乔, 张宝东, 等. 激光半主动半实物仿真导引头光学系统的设计[J]. 红外与激光工程, 2008,37(2): 321-325.
[2] Zhang Zhifeng, Yu Tao, Su Zhan, Kuang Cuifang, et al. The theoretical study of spot and four quadrant detector quadrant size relationship[J]. Photon Technology, 2005, 9(3): 128-130.
张志峰, 余涛, 苏展, 等. 像光斑和四象限探测器象限面积大小关系的理论研究[J]. 光子技术,2005,9(3): 128-130
[3] Shan Baozhong,Wang Shuyan, Niu Hanben, et al. Zernike polynomial fitting method and its application[J]. Optics and Precision Engineering, 2002, 10(3): 318-323.
单宝忠, 王淑岩, 牛憨笨, 等. Zernike多项式拟合方法及应用[J]. 光学精密工程, 2002,10(3): 318-322.
[4] Schwiegerling J. Scaling Zernike expansion coefficients to different pupil sizes[J]. Optical Society of America, 2002, 19(10): 1937-1945.
[5] Li Fu, Ruan Ping, Ma Xiaolong, et al. Methods of opto-mechanical analysis with Zernike polynomials[J]. Journal of Applied Optics, 2007, 28(1): 38-42.
李福, 阮萍, 马小龙, 等. 用Zernike多项式实现光机分析的技术方法[J].应用光学, 2007,28(1): 38-42.
[6] Qi Bo, Chen Hongbin, Dong Nengli. Wavefront fitting of interferograms with Zernike polynomails[J]. Society of Photo-Optical Instrumentation Engineers, 2002,41(7): 1565-1569.
[7] Hu Bo, Chang Weijun, Sun Ting, et al. Laser semi-active seeking guided seeker optical system[J]. Journal of Applied Optics, 2012,33(2): 402-405.
胡博,常伟军,孙婷,等. 激光半主动制导导引头光学系统的设计[J].应用光学,2012, 33(2): 402-405.
[8] Su Jiangang, Huang Yanjun, Liu Shangqian,et al. Research on the hardware-in-the-loop simulation technology for the energy characteristics of laser guided weapons[J]. Acta Photonica Sinica, 2007, 36(9):1722-1724.
苏建刚, 黄艳俊, 刘上乾, 等. 激光制导武器能量特性半实物仿真技术研究[J]. 光子学报, 2007, 36(9):1722-1724.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
装备制造技术(2020年11期)2021-01-26
中国医疗设备(2019年1期)2019-01-15
汽车工程学报(2015年6期)2016-03-23
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
