旋转流场下的振荡动导数试验技术研究
2014-03-30 06:37吴金华孙海生沈志洪姜裕标
实验流体力学 2014年4期
吴金华, 孙海生, 沈志洪, 姜裕标
(中国空气动力研究与发展中心, 四川 绵阳 621000)

符 号 说 明
0 引 言
良好的过失速机动能力是评价现代战机性能的重要指标之一。但飞机在过失速机动过程中经常由于进入尾旋而失事。因此,研究飞机在旋转流场下的非定常气动特性,对于研究飞机的抗偏离/尾旋特性以及尾旋改出特性有着重要的意义。
通过风洞试验获取动导数参数是主要研究方法之一。早期的研究人员寄希望于将稳定尾旋的旋转天平试验数据和单自由度动导数试验数据结合起来,估算旋转流场下的振荡动导数,但这种方法并不可靠[1]。Jacob Kay利用F-16和F-22模型在12ft立式风洞中进行了旋转天平加强迫振荡试验,试验数据同样表明在大迎角范围内,尤其是同时有较大侧滑角姿态下,振荡尾旋的非定常气动特性与稳定尾旋相比有较大差距,体现出更强的非线性[2]。因此,国内外研究机构相继开发各自的试验技术来进行相关的研究工作[3-6]。由于开展风洞试验技术研究的重要性,故基于中国空气动力研究与发展中心低速所Φ5m立式风洞平台开展了旋转流场下的振荡动导数试验技术研究。该技术是国内首次在立式风洞开展,为研究飞机的抗偏离/尾旋特性以及尾旋改出特性奠定试验基础。
动导数风洞试验的关键在于如何获取动导数参数。本文着重阐述了在旋转/振荡耦合运动下识别组合动导数的方法,然后通过风洞试验获得了3个组合动导数试验数据,并给出简要分析和讨论。
1 试验原理
由于旋转运动和振荡运动耦合,因此本项研究的难点是在耦合运动下如何识别组合动导数参数。下面将从运动学方程的角度出发,利用线性小扰动假设推导识别组合动导数的方法。
1.1运动方程
根据各个坐标系之间的角度转换关系,飞机模型的迎角α和侧滑角β的表达式如式(1)所示[7]。其中:θ为俯仰角;ψ为偏航角;φ为滚转角;χ为航迹偏角,γ为航迹倾角。
sinβ=sinθsinφcos(ψ-χ)cosγ
-cosφsin(ψ-χ)cosγ
-sinγsinφcosθ
(1)
当模型安装在立式风洞旋转天平装置中时,为典型的“Γ”型结构,同时χ=γ=0。在无预置的条件下,模型的偏航角度始终为零,即使是在偏航振荡中,由于是绕着零点做小幅振荡,也可近似认为偏航角为零。则式(1)可以化简为:
sinβ=sinθsinφ
(2)
从而得到迎角α和侧滑角β关于俯仰角θ和滚转角φ的表达式:
tanα=tanθcosφ
sinβ=sinθsinφ
(3)
将式(1)对时间求导,并利用绕体轴的角速度p,q和r来表示迎角和侧滑角的变化率为:


(4)
1.2动导数参数识别
依据线性假设理论,分开纵向和横向的影响,气动系数数学模型为:

(5)
式中:C为动态气动力,C0为静态气动力。
以旋转/俯仰耦合振荡为例,当模型以Ω的角速度进行旋转运动,并且同时绕体轴以角位移Θ(t)=Θsinωt的方式进行俯仰耦合振荡时,其纵向运动方程为:
Δα=Θ(t)=Θsinωt


(6)
将式(6)带入式(5)纵向气动系数中化简可得:
(7)
另一方面,依据小扰动假设纵向气动系数还可以表示为[8]:
(8)

(9)

2 试验设备
2.1旋转天平装置
Φ5m立式风洞旋转天平装置如图1所示,交流变频异步电机通过减速器、弹性联轴器、中心体和旋转轴来驱动圆弧轨道绕着平行于风洞来流方向的轴线做正向或反向旋转。最高转速可达100r/min,转速控制精度为1%。支撑装置通过滑车连接到半径为2m的圆弧轨道上,滑车在圆弧轨道上的移动可以改变模型的俯仰角度,并保证模型的旋转中心不变,支杆通过绕自身轴线的旋转改变模型的滚转角,两者的结合即可获得所要求模型的迎角和侧滑角[9]。

图1 旋转天平试验装置图
2.2俯仰支撑装置
俯仰支撑装置采用平行四边形机构,如图2所示。主支杆起固定连接和承受载荷的作用,调节杆通过两端左旋和右旋螺纹来精确保证天平套筒与摇摆杆平行,运动控制通过摇摆杆、尾支杆、调节杆、等直杆传递到天平套筒。摇摆杆上连接减速器轴和尾支杆的两个铰接点,以及天平套筒上连接尾接头和主接头的两个铰接点,二者平行且相等,那么依据平行四边形原理,摇摆杆的转动角度与天平套筒的转动角度相同,因此伺服电机通过减速器控制摇摆杆做正弦振荡运动,就能保证天平套筒和模型能够进行相同的正弦振荡运动。俯仰振荡频率范围为0.05~1.5Hz,最大振幅可达35°。
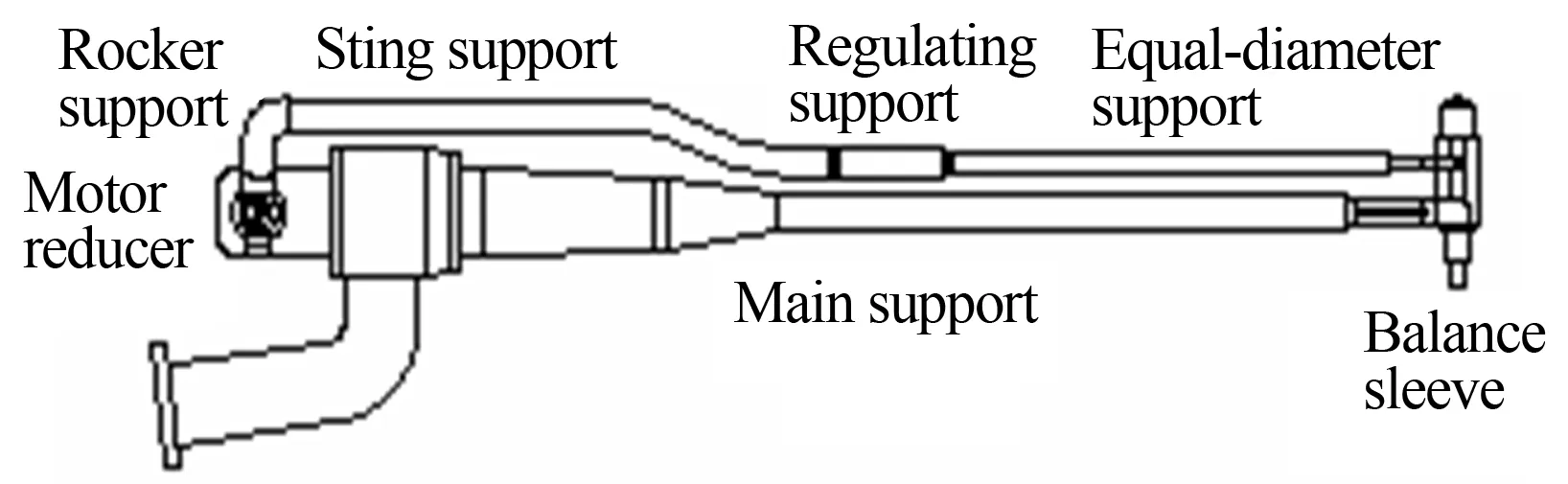
图2 俯仰支撑装置结构示意图
2.3滚转/偏航支撑装置
滚转/偏航支撑系统结构图如图3所示,电机与减速器相连并固连在支撑弯管上,电机、减速器、电位器安装轴和支杆依次相连,从而电机输出的扭矩依次传递最终达到支杆前端的天平模型。支杆通过一组“背对背”式的单列圆锥滚子轴承支承在转轴座上,从而确保了支杆与转轴座之间只存在相对滚转的自由度。当以尾撑方式安装模型时,则可以做滚转振荡,当加上偏航天平转接套筒时,则可以以背撑或腹撑的方式安装模型,从而进行偏航振荡。滚转/偏航振荡频率范围为0.05~2.5Hz,最大振幅可达35°。
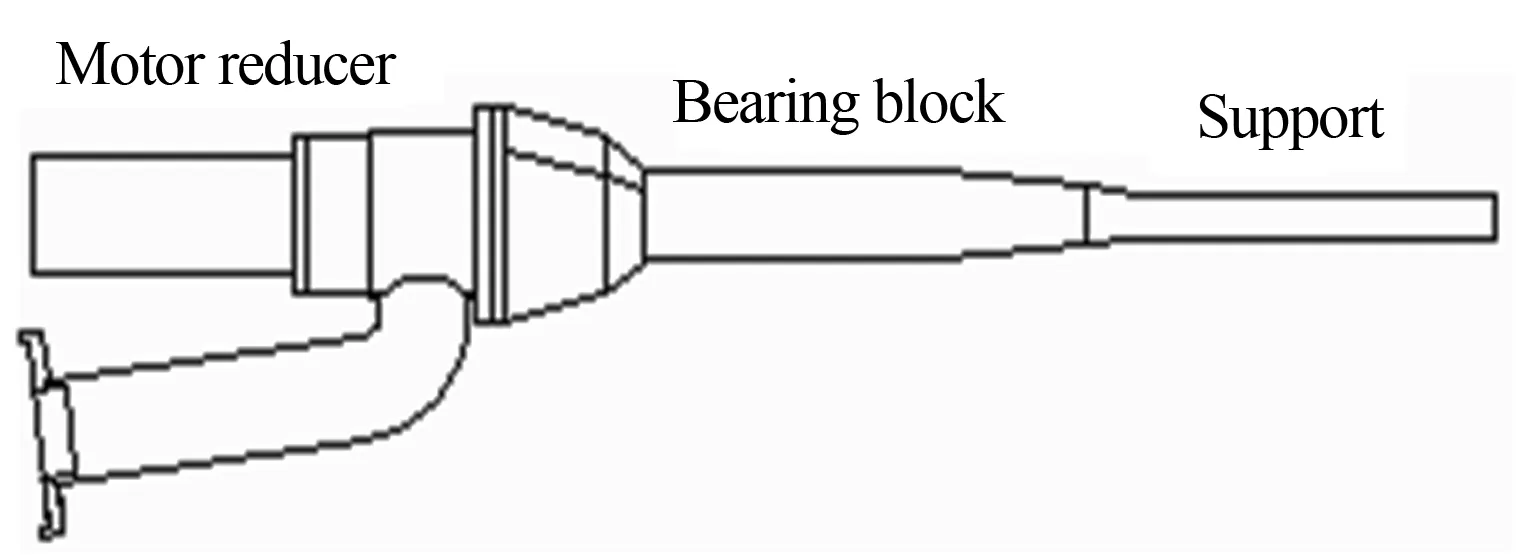
图3 滚转/偏航支撑装置结构示意图
3 试验结果与讨论
3.1不同风洞的结果对比
图4~6分别给出了Φ5m立式风洞旋转天平装置与Φ3.2m风洞张线装置单自由度俯仰振荡、偏航振荡和滚转振荡的结果对比。试验条件为:30m/s风速,1Hz振荡频率和2.5°振幅。从3张图可以看出,两个风洞试验的3个组合动导数曲线随迎角的变化趋势是一致的。在失速迎角40°之前,组合动导数结果缓慢变化,两个不同风洞装置试验结果的不同仅仅体现在量值上的微小差别,立式风洞旋转天平装置在失速前的结果比Φ3.2m风洞张线装置结果的波动变化更大。在失速之后,两个风洞装置的结果都表现出组合动导数先减小后增大的趋势,所不同的是立式风洞旋转天平装置的峰值变化更大。在文献[10]中旋转天平装置与Φ3.2m风洞张线装置静态结果相比,出现了在失速区的升力和俯仰力矩有更大变化梯度的现象。结合这两种现象,初步推断可能是由于旋转天平装置本身的支撑干扰在失速区加剧了流动分离现象,从而导致了动态信号的非线性更加强烈。因此对比试验结果可知,该试验技术合理可靠。
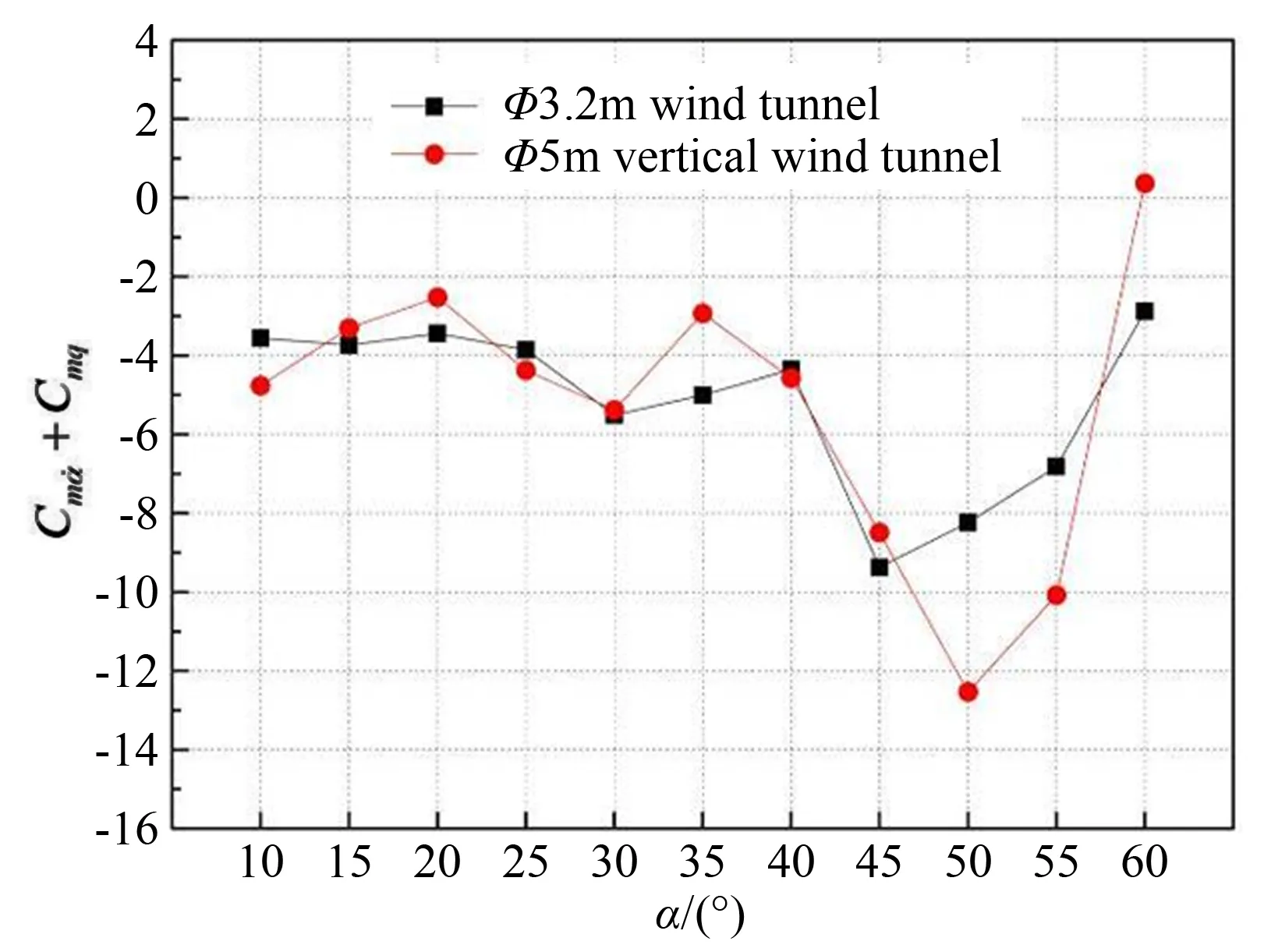
图4 俯仰组合动导数的结果对比
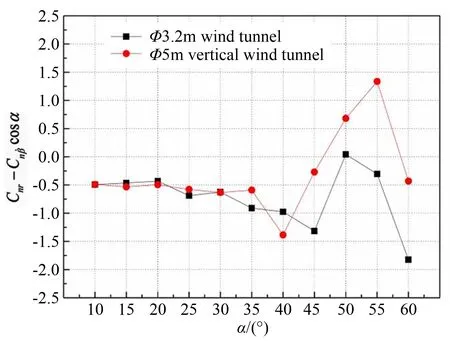
图5 偏航组合动导数的结果对比
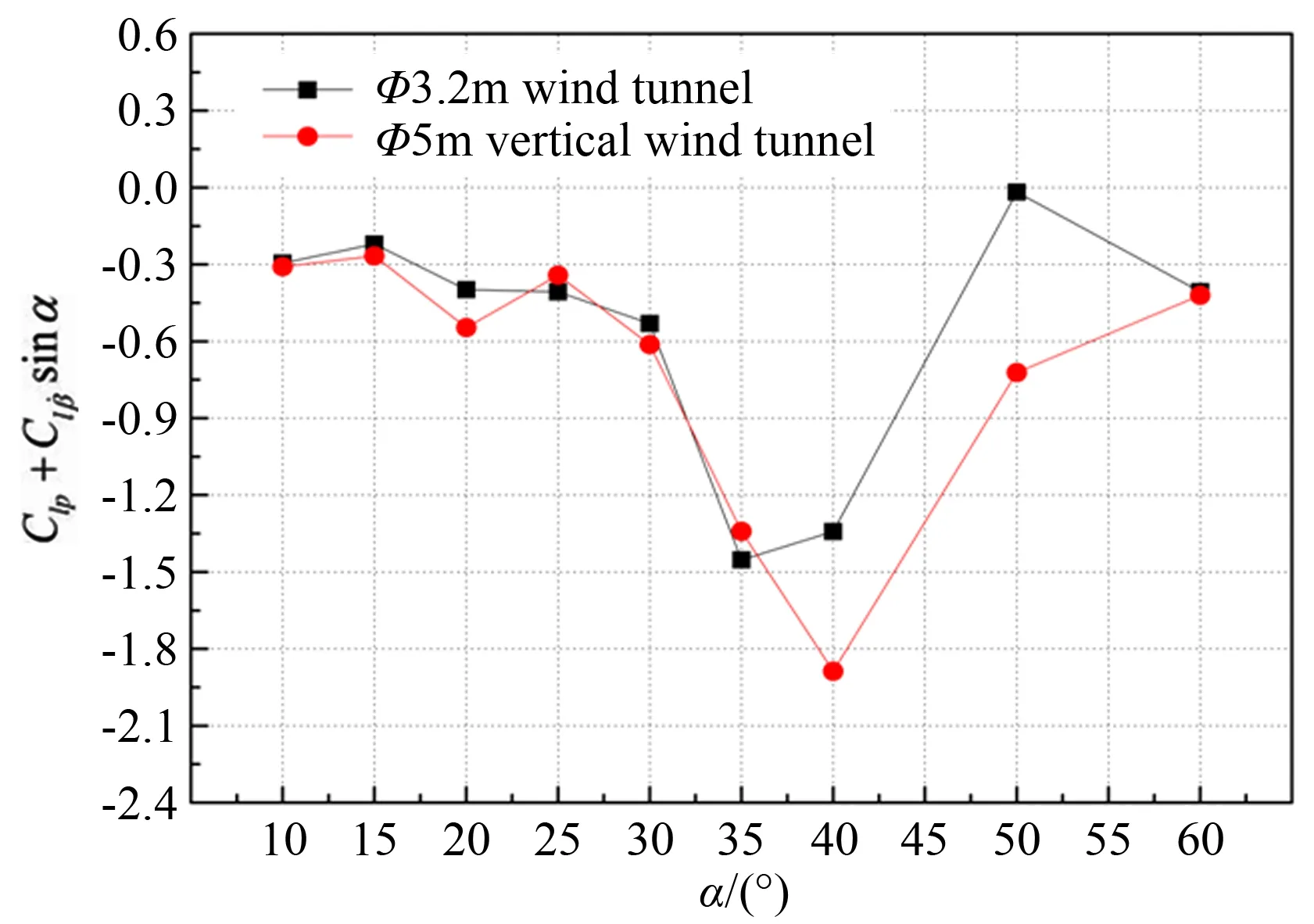
图6 滚转组合动导数的结果对比
3.2旋转对于动态结果的影响
图7给出了旋转/俯仰振荡耦合试验在不同旋转速度下俯仰组合动导数的结果。结果表明转速的变化对于俯仰组合动导数有着明显的影响。小转速下(λ≤0.03),在失速之前,组合动导数结果随迎角变化缓慢,直至失速区由于分离而变化剧烈。在大转速下组合动导数随迎角增大产生明显波动,说明较高的旋转速度会明显增强纵向组合动导数的非线性,使得组合动导数变得极不稳定。
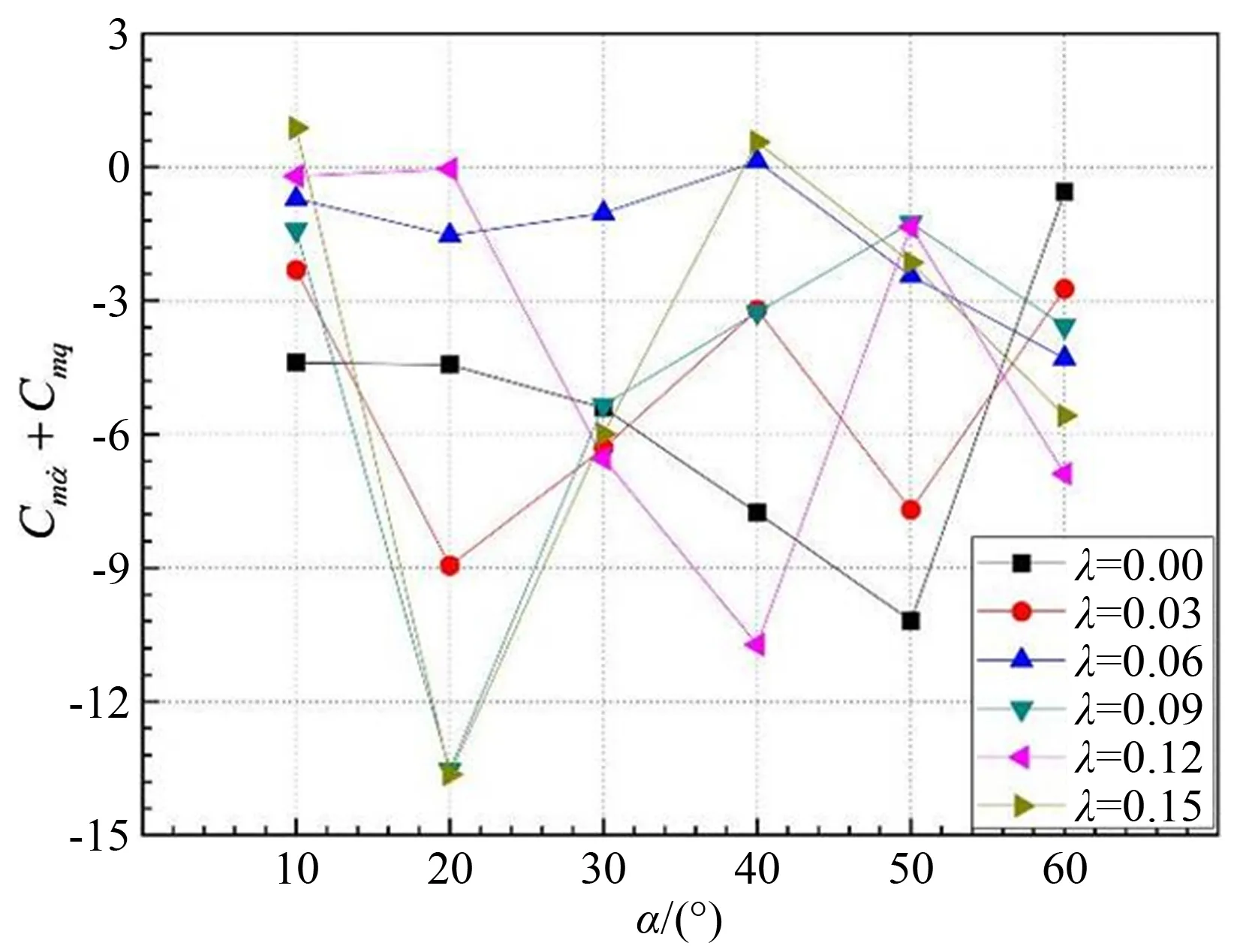
图7 旋转/俯仰耦合振荡组合动导数的转速影响曲线
图8给出了旋转/偏航振荡耦合试验在不同旋转速度下偏航组合动导数的结果。从结果可以看出,当λ≤0.03时,偏航组合动导数呈现先减小后增大再减小的变化趋势,但当λ≥0.06时,逐渐演变成只呈现先减小再增大的变化,说明旋转运动改变了失速区后流场的变化,甚至有可能在大转速大迎角下,改变偏航组合动导数的符号,进而变得动不稳定。
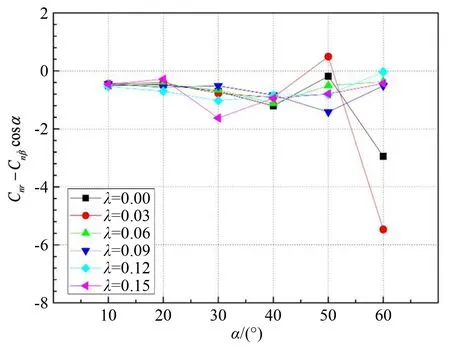
图8 旋转/偏航耦合振荡组合动导数的转速影响曲线
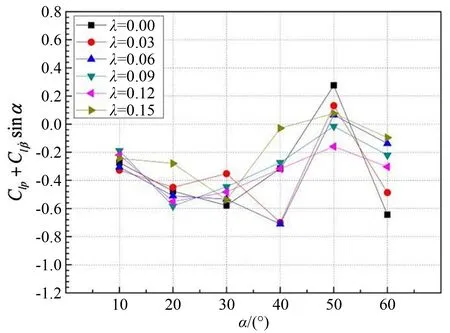
图9 旋转/滚转耦合振荡组合动导数的转速影响曲线
图9给出了旋转/滚转振荡耦合试验在不同旋转速度下滚转组合动导数的结果。从结果可以看出,转速不大时(λ≤0.09),转速对于滚转组合动导数的结果影响并不明显,各个转速下的滚转组合动导数随迎角的变化趋势一致。但在大转速下,失速迎角之后的组合动导数和相同迎角不同转速的结果相比,波动变化明显增大,可见,旋转运动在大迎角失速区域增大了滚转振荡的非线性,该结果与文献[2]中的旋转/滚转耦合振荡结果相符。
4 结 论
详细介绍了在中国空气动力研究与发展中心低速所Φ5m立式风洞建立的旋转流场下的振荡动导数试验技术,详细推导了旋转/振荡耦合运动学方程,并以旋转/俯仰振荡耦合为例,给出了旋转/振荡运动状态下识别动导数的方法。进行单自由度对比试验的结果表明,40°失速之前Φ5m立式风洞和Φ3.2m风洞的数据有较好的一致性,数据合理可靠,达到试验要求。旋转/振荡耦合试验结果表明,旋转运动对于纵向俯仰组合动导数有明显的影响,使得组合动导数变得极不稳定。对于横向组合动导数,小转速不改变组合动导数随迎角的变化趋势,但有量值上的区别。大转速显著增强结果的波动性,甚至改变组合动导数的符号,表明旋转运动加剧了非定常气动特性的非线性。
建立的旋转流场下的振荡动导数试验技术能够为旋转流场下飞机的非定常气动特性研究提供一个有效的试验平台。
参考文献:
[1]Ericsson L E. Rotary-balance testing for aircraft dynamics[R]. AGARD AR-265,1990.
[2]Jacob Kay. Acquiring modeling unsteady aerodynamic characteristic[C]. AIAA Atmospheric Flight Mechanics Conference, 14-17 2000.8/Denver, CO.
[3]D Bruce Owens, Jay M Brandon, Mark A Croom. Overview of dynamic test techniques for flight dynamics research at NASA LaRC (Invited)[J]. AIAA NASA VA, 23681, 2003.
[4]Hultberg R S. Multi-axis test rig for the AFRL vertical wind tunnel[R]. AFRL-VA-WP-TR-1998-3036, May 1998.
[5]Cooperative Programme on dynamic wind tunnel experiments for manoeuvring aircraft[R]. Agard Advisory Report. 305.
[6]杜希奇, 卜忱, 于彦泽, 等. 低速风洞旋转流场下滚转振荡动导数试验技术研究[J]. 实验流体力学, 2005, 19(4): 46-48.
Du Xiqi, Bu chen, Yu Yanze, et al. Investigation of roll oscillation dynamical stability derivative in rotation flow field[J]. Journal of Experiments in Fluid Mechanics, 2005, 19(4): 46-48.
[7]方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京航空航天大学出版社, 2005.
[8]孙海生. 飞行器低速大迎角动稳定性风洞试验技术研究[D]. 西北工业大学, 2003.
[9]马军, 姜裕标, 祝明红, 等. Φ5米立式风洞旋转天平试验装置研制[J]. 实验流体力学. 2012, 26(2): 77-80.
Ma Jun, Jiang Yubiao, Zhu Minghong, et al. Development of the rotary balance system in Φ5m vertical wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2012, 26(2): 77-80.
[10] 郭林亮. 某型飞机第二期旋转天平试验006-1103试验报告[R]. 中国空气动力研究与发展中心低速所, 2012.
作者简介:

吴金华(1989-),男,江西景德镇人,助理工程师,硕士研究生。研究方向:非定常空气动力学。通信地址:四川绵阳空气动力研究与发展中心(621000)。E-mail: wujinhua1989_2006@126.com。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
军民两用技术与产品(2021年8期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
中学生数理化·八年级物理人教版(2020年12期)2021-01-18
小哥白尼(野生动物)(2020年3期)2020-07-27
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
数学大王·中高年级(2018年11期)2018-12-17
少年漫画(艺术创想)(2018年2期)2018-09-11
科技传播(2014年4期)2014-12-02
环球时报(2009-11-05)2009-11-05