接触线几何参数图像检测系统设计
2014-06-01 10:01张国山凌朝清王欣博杨晗芳
天津工业大学学报 2014年5期
张国山,凌朝清,王欣博,杨晗芳
(天津大学电气与自动化工程学院,天津 300072)
接触线几何参数图像检测系统设计
张国山,凌朝清,王欣博,杨晗芳
(天津大学电气与自动化工程学院,天津 300072)
为了保证电力机车的正常运行,需要实时监控接触线高度和拉出值等动态几何参数.首先通过分析受电弓和接触线的成像特点,结合水平直线检测和边缘模板匹配识别受电弓,设计简单的定位跟踪方法识别接触线,然后通过摄像机标定计算接触线高度和拉出值,最后将检测结果与警戒参数进行对比,如果发现异常,系统将进行短信报警并将异常信息上传数据库.实践结果表明:该系统能够准确检测接触线高度和拉出值,而且对光照变化和背景复杂等影响因素不敏感,满足工业的检测需求.
接触线;几何参数;图像检测;接触线高度;受电弓;拉出值;非接触式检测
随着电气化铁路建设的高速发展,具备了高效率、低污染等优点的电力机车得到了越来越广泛的应用.沿线铺设的接触网负责将牵引变电所提供的电能输送到铁路上方,而安装在机车车顶上的受电弓则通过升降操作,使得受电弓上的滑板与接触网导线(简称接触线)保持滑动接触,从而为机车汲取电能.为了保证车辆能够连续不断地获取电能,需要接触线与滑板在运行中一直保持良好的接触.然而列车高速运行过程中,受电弓与接触线之间存在着复杂的力学和电气化的交互作用,很容易发生接触线过高,偏离滑板中心过多甚至是弓网离线等故障.因此,必须高效、准确和实时地对受电弓和接触线进行检测和监控,及时检修和维护弓网系统,以达到有效地减少弓网故障的目的.根据检测设备是否接触或者接近受电弓与接触网,可以把检测方式分为接触式和非接触式[1-2].接触式检测虽然是很重要的检测手段,但需要在受电弓上安装各种光电传感器[3-4],影响受电弓的动力性能,存在较大的隐患.非接触式检测可分为测距技术检测和图像处理技术检测.测距技术检测主要是利用激光[5]和超声波[6]来检测弓网参数,但是激光功能相对单一,而超声波检测精度不足.图像处理技术检测能利用单一的设备对多个弓网零部件进行检测,自动化和智能化程度较高,因此得到了世界各国的青睐.接触线高度和拉出值是列车运行中非常重要的几何参数.接触线高度是指接触线摩擦表面到轨道上表面的垂直距离,它表征接触线上下震动的情况.接触线的高度既要遵循国家的相关规定,也需考虑当地的地形情况.接触线拉出值是接触线和滑板的接触点到滑板中心的距离,它表征接触线左右摆动的情况.拉出值过小不能很好地保护受电弓滑板,拉出值过大容易发生钻弓事故.本文所提出的弓网检测系统就是一个以接触线高度和拉出值作为检测目标的非接触式图像检测系统,所需要的检测信息直接由安装在车顶的视频采集模块获取,能在行车过程中识别受电弓和接触线,计算接触线动态高度和拉出值,并在接触线高度过高和拉出值过大时发出报警信息.
1 系统设计
本检测系统主要包含视频采集模块(含辅助照明模块)、检测处理模块(内置报警模块)和监控查看模块,三者通过网络构成系统,如图1所示.

图1 检测系统工作原理Fig.1 Operating principle of detecting system
采集模块主要由1台200万像素的高清数字化网络相机、外壳防护等级为IP66的采集模块防护罩和辅助照明模块构成,其中辅助照明模块可根据现场需求选用外置LED灯和内置红外补光灯2种方案,采集模块可以全时段全路线的采集南北方电力机车的弓网视频.出于图像直观和算法简单的考虑,一般来说视频采集模块位于所拍摄受电弓的正面,与受电弓的距离根据拍摄需求和设备安装的实际情况来决定.在本系统中受电弓与摄像机的距离为8 m,摄像机斜向上拍摄受电弓全貌和全部运动范围,图2为本系统在现场采集到的一幅画面.
检测处理模块置于列车内,主要由监控处理主机、报警模块和现场箱构成,其中报警模块包含3G网络模块和资费卡.监控处理主机对采集模块传输过来的视频信号进行编码存储,以便查看弓网工作状态.同时把视频信号图片化,分析后与主机内预先设定的接触线高度和拉出值警戒参数进行对比,一旦超出警戒参数,系统将通过报警模块向指定手机发送报警短信,同时将异常信息上传到网络数据库,只要具备登录权限,就可以进入数据库查看异常.

图2 摄像机获取的图像Fig.2 Picture from camera
监控查看模块是指一个基于MFC编写的处理软件,软件界面如图3所示.界面上显示图像检测结果、系统内部参数和设备连接情况,利用3G网络,可以通过该软件实现对整个系统的远程控制.

图3 显示查看界面Fig.3 Display interface
2 图像处理算法
因为接触线与滑板上边缘相互接触,所以本系统首先准确识别受电弓和接触线,然后找到接触线与滑板上边缘的接触点,进而计算弓网几何参数.
受电弓的识别方法基本上都是从受电弓滑板的特点出发.由图2可以看出,滑板在所采集到的图像中最显著的特征是基本处于水平状态,若没有受到严重的磨损,其上边缘可以认为是具有一定长度的水平直线,因此很多研究通过检测图像中的水平直线来识别受电弓[7-8].此外,由于受电弓在图像中的形状、大小和方向基本固定,也有不少研究通过模板匹配的方法识别受电弓[2,9].检测水平直线的方法容易产生误检,而模板匹配的方法往往耗时较长.本文创新性地将2种方法相结合,通过水平直线检测来确定受电弓的候选位置,然后通过模板匹配从候选位置中判定出正确的受电弓位置.
接触线的提取算法主要是依据接触线在图像中的特点:具有一定斜率,而且运动具有连续性.识别方法可以分为2种:一种是在每一帧图像中直接根据位置和斜率定位接触线[10-11],这种方法抗干扰的能力较弱;另一种是根据上一帧图像的接触线信息,在下一帧图像中对接触线进行跟踪[12],这种方法对第一帧图像中接触线的确定要求非常苛刻.本文在充分分析接触线检测中的干扰之后,提出了一个先定位后跟踪、跟踪定位相结合的接触线识别方法.
2.1 检测边缘直线
(1)提取图像边缘.图像边缘是图像区域中灰度变换剧烈的像素点的集合.数学上常常用梯度大小来表征灰度变换的剧烈程度,只要某点的梯度大于设定的阈值,则可以认为该点是边缘点.经典的Sobel边缘算子就是一个二维差分梯度算子.以图像左下角为坐标原点,向右为x轴正方向,向上为y轴正方向,图像f(x,y)在位置(x,y)的梯度向量利用其邻域,可定义为:

式中:Gx、Gy近似为x和y方向上的导数.
梯度的大小可以用梯度的幅值S(x,y)表示,其通常简化为式(2):

传统的Sobel边缘检测算子只包含2组3×3的矩阵,只能对水平和垂直方向的边缘较为敏感.但是受电弓两端和接触线包含多个方向上的边缘,为了较完整地检测受电弓和接触线,避免断续和模糊的问题,本文采用改进的Sobel边缘检测算法[13].该算法包含8个方向的边缘检测算子,如图4所示,8个算子对图像进行逐点检测,所得绝对值的最大值可以作为该点的梯度输出.

图4 改进的Sobel检测算子Fig.4 Improved Sobel operators
由于摄像机固定于车顶,受电弓与摄像机之间的水平位置不随车辆摆动和震动所变化,所以可以认为受电弓在图像中的横向位置几乎不变.同时,在设备安装时可以获取受电弓在图像中的垂直运动范围,因此可以设定用于后续处理的合适的ROI(region of interest),减少运算量,边缘检测的处理结果如图5所示.

图5 边缘图像Fig.5 Edge image
(2)检测边缘直线段.经过Sobel处理得到的图像边缘是多像素的,定位精度不高.为此,本文先利用骨架提取算法对边缘图像进行细化,在保证整个图形构造不变的情况下,获取弓网图像的较连续的单像素边缘.
随后,利用累计概率霍夫变换(PPHT)提取边缘直线段[14].根据点与线的对偶关系,将原始图像空间给定的一个点通过曲线表达形式变为参数(ρ,θ)空间的一条曲线,转换公式为式(3):

把参数(ρ,θ)空间细分为所谓的累加器单元,落在同一个累加器单元中的点可认为在图像空间是共线的,由此把直线的提取问题转换为计数问题.通过设置最小线段长度和碎线段连接为一条直线的最大线段间隔等参数,可以得到满足需求的线段两端点在图像中的坐标值,处理得到的线段如图6所示.

图6 边缘直线段Fig.6 Edge line segments
设某一条边缘线段的两端点为p1(x1,y1)和p2(x2,y2),其倾斜角可以通过式(4)计算:

考虑一定的误差,倾斜角小于3°的直线段可当作水平直线,它们是滑板上边缘的候选位置.倾斜角在10°~80°之间的直线段可当作接触线的边缘直线段.
2.2 识别受电弓
列车常常途经站台、隧道、山岭、市区等场景,因此可检测到多个滑板上边缘的候选位置,还需要对这些候选位置进行进一步的筛选.为了避免光照变化带来的影响,本文采用边缘模板匹配的方法来识别受电弓,从而从多个候选位置中确定出滑板的上边缘.
边缘模板匹配实际上是一种基于特征的匹配方法[15].物体的边缘轮廓是一个物体最基本的特征,它受灰度变化的影响较小,因此可以作为模板匹配的特征点.将检测图像和模板图像都处理为边缘图像,计算两者之间点对点的差异,可以得到它们的非相似度.由于边缘图像往往是二值图像,因此对应像素点之间的差异可以定义为像素值的异或值.设f(x,y)为检测图像,t(j,k)为J×K的模板图像,参考点(x,y)的非相似度d(x,y)用式(5)计算:

非相似度d(x,y)越小,则搜索区域与模板的相似度越高.
由于受电弓的弓头羊角部分比中间水平部分含有更多细节信息,因此本系统选取无干扰下滑板左右两端的边缘图像作为模板,如图7所示.
受电弓的横向位置几乎不变,纵向位置处于水平边缘下方,因此模板搜索区域的横向位置可以根据先验知识确定,纵向位置根据滑板上边缘的候选位置确定.逐次在候选位置所确定的搜索区域中进行模板匹配,最小非相似度所对应的区域即为受电弓的位置.

图7 匹配模板Fig.7 Matching templates
使用边缘模板匹配识别受电弓不仅不受灰度变化的影响,还把大量复杂的图像处理转换为最基本的移位和逻辑运算的组合,大大缩短了单次匹配的时间.此外,利用水平直线确定模板搜索区域,可以大大减少匹配次数,提高整体的运算时间.因此,本文所提的受电弓提取算法是一个高效率、高准确率的检测方法.
2.3 识别接触线
在识别了受电弓之后,就可以确定出对接触线进行采样的图像空间,一般来说选在滑板上边缘位置上方一定的区域内.由图6可以观察到,接触线的边缘直线都是成对出现且近乎平行的,因此本文采用两两配对的方法获得接触线候选目标.配对条件为:
(a)两条线段倾斜角几乎相等;
(b)两条线段不相交;
(c)两条线段有重叠的区域;
(d)两条线段之间的宽度满足一定的范围.
设接触线在弓网图像中的像素宽度为A,则条件(d)所说的两线段的宽度范围可以取为0.8 A~1.2 A.满足以上4个条件的2条线段可以认为是接触线的2个边缘直线段,其4个端点构成的四边形的沿着接触线方向的中线可以认为是接触线,处理得到的候选目标如图8所示.

图8 接触线候选目标Fig.8 Candidates of contact line
由于摄像机在安装时要求在满足弓网检测的前提下,尽量减小视场角,避免过多的干扰物出现,所以经过处理的图像,往往只出现承力索和接触线2个目标.但是当拍摄背景复杂时,例如遇到线岔和锚段关节等设备,多条线索会在一帧图像中同时成像,经过图像处理后,可能会检测到多个候选目标.承力索是判定接触线最大的干扰,其形态几乎与接触线一样.辨识接触线和承力索主要依赖两点:其一是由于接触线离摄像机距离更近,其宽度往往大于承力索;其二是由于本检测系统中摄像机从左边取景,接触线总是位于承力索的右边.本文设计的接触线识别方法为:首先在出现2个候选目标的图像中正确定位接触线,随后利用运动的连续性原理,根据上一帧图像检测到的接触线的信息,在本图像中利用斜率和距离进行匹配跟踪.由于匹配跟踪的方法极有可能跟踪到承力索,导致拉出值持续较大,因此在得到拉出值过大的检测结果后还需要进行判断,一旦发现跟踪错误,则重新定位接触线.
3 检测结果与分析
初步将本系统应用到大连轻轨上,采用帧率为20帧/s的相机和Intel 2.5 GHz CPU、4 G内存的工控机,系统的平均运行速度达到16帧/s,满足实时处理的要求.实际上,对一张图像进行图像处理的时间仅为0.015 s,因此可通过采用超线程技术和更高配置的硬件,进一步提高系统的运行速度,从而满足更高速铁路的检测需求.图9为系统在不同工况下的弓网检测效果,其中图(a)、(b)、(c)、(d)分别为大雾天气、站台内、隧道内、夜间的识别结果,可以看出,算法对复杂背景、变化光照、干扰噪声等影响因素不敏感,可以完成多种情况下的弓网识别.

图9 检测结果Fig.9 Detecting results
识别出受电弓和接触线之后,计算滑板上边缘与接触线的交叉点(即为接触点),交点纵坐标可以认为是接触线高度的像素值,交点横坐标与滑板中点横坐标之差可以认为是接触线拉出值的像素值,然后根据文献[2]的方法对摄像机进行标定,从而转换出接触线高度和拉出值的实际值.本系统的转换公式为:

式(6)为接触线高度的转换公式,其中Hm为待转换的接触线实际高度,Hp为检测到的接触线像素高度,数值3.64为单位像素所对应的实际高度,数值104和5 370分别为参考点的像素高度和对应的实际高度.式(7)为接触线拉出值的转换公式,其中Lm为待转换的拉出值实际值,Lp为检测到的拉出值的像素值,数值3.66为单位像素所对应的实际长度.现给出一些具有代表性的现场检测结果,如图10和图11所示.

图10 接触线高度Fig.10 Contact line heights
图10(a)为从隧道内运行到隧道外的接触线高度检测结果.受电弓在隧道内的运行高度往往比较低,从隧道运行到户外,受电弓需要进行一系列升弓操作来跟逐渐升高的接触线保持接触.图中的300帧到400帧就是对应的升弓过程.图10(b)为雾天户外的检测结果.在户外,接触线的高度多维持在5 700 mm以上,而且随着列车的运行,上下震动幅度较大.不同地形对接触线的高度有不同的要求,把接触线的动态高度信息反馈给铁路局,可以指导接触线的铺设.此外,接触线高度图中存在着一些明显的尖峰,这是由于接触线硬点或者列车速度突变造成的.记录这些尖峰时刻的信息,可以为以后进行录像查看时提供依据.
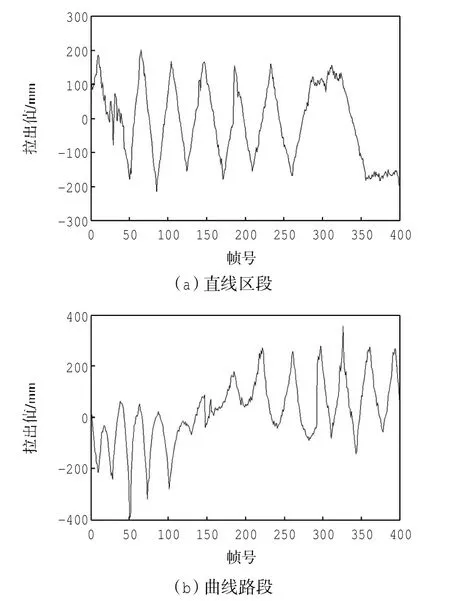
图11 接触线拉出值Fig.11 Pull-out values of contact line
图11(a)为直线路段的拉出值检测结果,拉出值基本处于均匀的正负交替的状态,摆动比较稳定.图11(b)为连续几个拐弯的曲线路段的拉出值检测结果,由图可以看出,曲线路段的拉出值比直线路段的平均值大,而且变化幅度更剧烈,因此曲线路段更容易出现拉出值过大的情况.对拉出值过大的检测结果必须进行判定,如51帧图像检测到了拉出值过大,但是经过进一步判断后发现是误检了承力索,因此抛弃本帧图像的信息,重新进行接触线定位,并且不进行报警.
4 结束语
本系统通过一台安装在车顶的摄像机获取弓网视频数据,同时运用有效的图像处理算法实现接触线高度和拉出值的检测.试验结果表明,检测算法具有较强的鲁棒性,能准确识别不同工况下的受电弓和接触线,在此基础上,可进一步对弓网离线、硬点拉弧、滑板磨损厚度等弓网参数进行检测.此外,将硬件设备模块化,并支持上网功能,使得系统具有设备安装简单、软件可远程调试等优点.本系统的提出,可为弓网系统的运营维护提供新的思路和技术参考.
[1]韩志伟,刘志刚,张桂南,等.非接触式弓网图像检测技术研究综述[J].铁道学报,2013,35(6):40-47.
[2]刘寅秋,韩通新,刘会平.基于图像处理的接触网动态几何参数测量研究[J].铁道机车车辆,2012,32(5):86-91.
[3]SCHRÖDER K,ECKE W,KAUTZM,et al.An approach to continuous on-site monitoring of contact forces in current collectors by a fiber optic sensing system[J].Optics and Lasers in Engineering,2013,51(2):172-179.
[4]BOCCIOLONE M,BUCCA G,COLLINA A,et al.Pantograph-catenary monitoring by means of fiber bragg grating sensors:Results from tests in an underground line[J].Mechanical Systems and Signal Processing,2013,41(1):226-238.
[5]HISA T,KANAYA M,SAKAI M,et al.Rail and contact line inspection technology for safe and reliable railway traffic[J]. Hitachi Review,2012,61(7):325.
[6]PUSCHMANN R,WEHRHAHR D.Ultrasonic measurement of contact wire position[J].Eb-Elektriche Bahnen,2011,109(7):323-324.
[7]陈维荣,冯倩,张健,等.受电弓滑板状态监测的图像目标提取[J].西南交通大学学报,2010,45(1):59-64.
[8]AYDIN I,KARAKOSE E,KARAKOSE M,et al.A new computer vision approach for active pantograph control[C]//Innovations in Intelligent Systems and Applications(INISTA),2013 IEEEInternational Symposium on.Piscataway,NJ,USA:IEEE,2013:1-5.
[9]张悦.受电弓动态包络线视觉检测系统研究[D].成都:西南交通大学,2008.
[10]AYDIN I,KARAKOSE M,AKIN E.A robust anomaly detection in pantograph-catenary system based on Mean-Shift tracking and foreground detection[C]//Systems,Man,and Cybernetics(SMC),2013 IEEE International Conference on.Los Alamitos,CA,USA:IEEE Computer Society,2013:4444-4449.
[11]鄂永.基于图像处理的铁路接触网检测系统的研究 [D].大连:大连理工大学,2009.
[12]蔡学敬.基于图像处理技术的高速接触网动态检测系统研究[D].成都:西南交通大学,2008.
[13]ZHANG J J,LUO J.A surface crack edge detection algorithm based on improved Sobel operator[J].Journal of Hefei University of Technology:Natural Science,2011,34(6):845-847.
[14]冯倩,陈维荣,王云龙,等.受电弓滑板磨耗测量算法的研究[J].铁道学报,2010,32(1):109-113.
[15]王廷,戴曙光.基于边缘的模板匹配在零件检测中的应用[J].光学仪器,2009,31(5):18-23.
Image detection system design for geometry parameters of contact line
ZHANG Guo-shan,LING Chao-qing,WANG Xin-bo,YANG Han-fang
(School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
In order to guarantee the normal operation of the electric locomotives,it is necessary to detect the dynamic pantograph-catenary geometry parameters,such as the contact line height and the pull-out value in real time.At first,after analyzing the imaging features of the pantograph and the contact line,the pantograph is extracted combining the level lines detection and the template matching,and the contact line is extracted using a simple locating and tracking method.Then the contact line height and the pull-out value are calculated after camera calibration.Finally the system will compare the results with the vigilance parameters and if there exists abnormal information,the system will make alarm by message and upload the abnormal information to the database.The practice result shows that the system can detect the contact line height and the pull-out value exactly,and is not sensitive to the variety of light and the complex background,so it fully meets the need of the detection in industry.
contact line;geometry parameter;image detection;contact line height;pantograph;pull-out value;noncontact detection
TP391.41
A
1671-024X(2014)05-0057-06
2014-06-03
国家自然科学基金(61074088)
张国山(1961—),男,教授,博士生导师.E-mail:zhanggs@tju.edu.cn
猜你喜欢
信息记录材料(2022年3期)2022-05-17
铁道机车车辆(2022年1期)2022-03-24
轨道交通装备与技术(2022年1期)2022-03-18
铁道学报(2020年8期)2020-09-07
哈尔滨铁道科技(2020年4期)2020-07-22
故事作文·高年级(2018年12期)2018-12-17
铁道学报(2018年5期)2018-06-21
小学生导刊(2018年4期)2018-04-18
小猕猴智力画刊(2017年3期)2017-03-24
作文与考试·小学高年级版(2016年2期)2016-09-10