半主动悬架模糊控制系统的仿真
2014-07-01 23:36李奇王靖岳
机械工程师 2014年5期
李奇,王靖岳
(1.北京现代汽车有限公司,北京100000;2.沈阳理工大学汽车与交通学院,沈阳110159)
半主动悬架模糊控制系统的仿真
李奇,王靖岳
(1.北京现代汽车有限公司,北京100000;2.沈阳理工大学汽车与交通学院,沈阳110159)
建立汽车的1/4车二自由度动力学模型,利用模糊控制工具箱设计了用于汽车半主动悬架的模糊控制器,通过应用MATLAB/Simulink对比仿真,结果显示传统的被动悬架在行驶平顺性方面不如使用模糊控制器的半主动悬架,应用模糊控制的半主动悬架系统可以有效提高汽车的行驶平顺性。
汽车;半主动悬架;模糊控制;仿真
0 引言
悬架是汽车的重要组成部分之一,被动悬架平顺性是其缺点,主动悬架结构复杂、成本高、普及难[1]。而结构较简单、造价低廉的半主动悬架则受到广泛重视[2]。半主动悬架运用可调阻尼式减振器,能耗消耗很小,减振效果优良,逐渐得到了国内外的认可。本文对某微型客车的半主动悬架系统控制性能进行分析评价,对常见的路面激励靠MATLAB进行仿真分析,对比分析被动悬架和模糊控制半主动悬架各性能指标的差异,最终说明采用模糊控制的半主动悬架在性能上明显优于传统的被动悬架。
1 半主动悬架动力学模型的建立
本文对汽车的右前悬架建立二自由度1/4车半主动控制模型,并假设[3]:1)把簧载质量与非簧载质量都视为刚体,不考虑车身悬置的阻尼和弹性;2)汽车在等速状况下行驶,轮胎一直不离开地面;3)悬架与轮胎刚度均为位移的线性函数,不计轮胎的阻尼;4)路面位移的输入函数作用在地面与轮胎接触点的中心。
一个简化的二自由度1/4汽车模型如图1所示,m2为簧载质量,m1为非簧载质量,k2为悬架弹簧刚度,k1为轮胎等效刚度,C(包括C0和Cn)为黏滞阻尼系数,FMR为库仑阻尼力,z0是路面的激励,z1和z2分别是车轮和车身的位移。

图1 1/4车辆半主动悬架系统
根据牛顿第二定律,系统的动力学方程为:

式中,fd为可控阻尼器的阻尼力
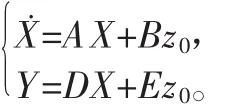
由系统的动力学方程,可推出系统的状态方程及输出方程为
2 模糊控制器的设计
车辆在行驶过程中,通过模糊控制器可以实现衰减车身振动,提高车辆乘坐平顺性。MATLAB软件中的模糊逻辑工具箱能设计模糊控制器来实现汽车悬架的控制。
2.1 确定模糊控制器的输入变量、输出变量以及基本论域
汽车车身加速度是评价行驶平顺性的主要指标,应控制车身加速度尽量减小。本文采用双输入单输出的二维模糊控制结构,即选择车身在垂直方向上的加速度a和速度v作为输入量,输出控制量u,用来调整可调阻尼器的阻尼值。输入变量及输出变量的基本论域为:1)模糊控制器输入量的基本论域:车身速度v=-1.2~1.2 m/s,车身加速度a=-3.5~3.5m/s2。2)控制器输出量的基本轮域w=960N·s/m。
2.2 确定精确量的离散化以及量化因子与比例因子
精确量的离散化:把车身速度v的基本论域离散为13级,表示为Ω(v)={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。将车身加速度a的基本论域离散为13级,表示为Ω(a)={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。将可控阻尼器的阻尼也离散为13级,表示为Ω(u)={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。车身速度v与车身加速度a以及控制器输出量使用7个语言变量组成的词集{负大,负中,负小,零,正小,正中,正大},用{NB,NM,NS,Z,PS,PM,PB}表示。经计算,车身速度v的量化因子为5;车身加速度的量化因子为1.7;控制量输出的比例因子为160。
输入变量v、a采用钟形隶属度函数,输出变量u的模糊子集使用三角形隶属函数。
2.3 模糊控制规则的确立
模糊控制规则用模糊语言的方式描述了控制器输入量和输出量的模糊关系。本文的模糊控制器将2个输入量用7个语言模糊集来描述,形成49条控制规则,建立模糊控制规则表如表1。
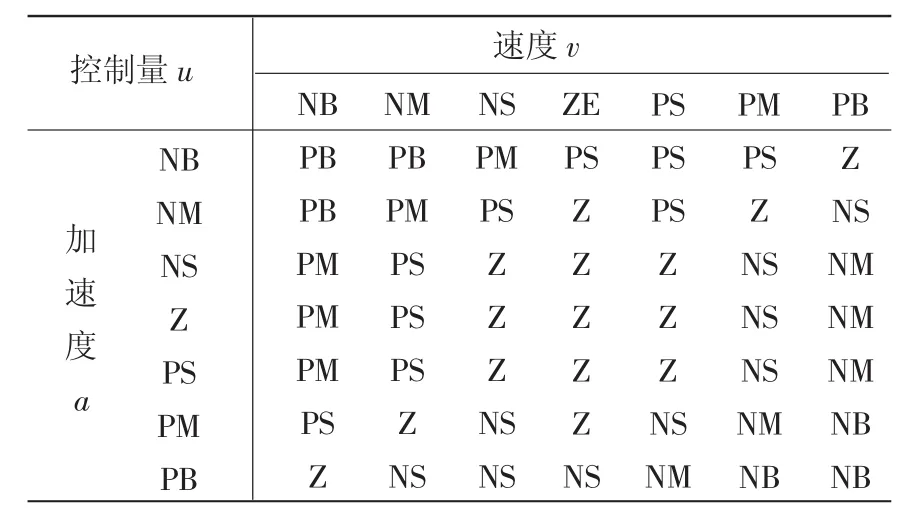
表1 模糊控制规则表
将上述控制规则输入后得模糊控制系统控制规则输入与输出网格曲线,如图2。
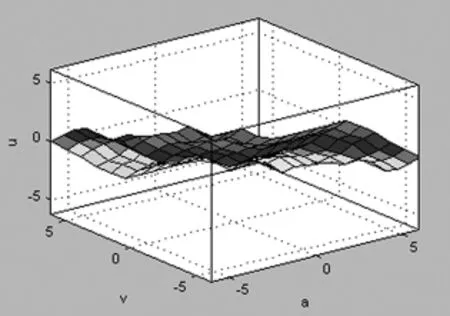
图2 模糊控制规则曲线
3 控制系统的仿真与分析
这里选取某微型客车的参数如下:非簧载质量m1=41 kg,簧载质量m2=424.5 kg,轮胎刚度k1=142 855 N/m,弹簧刚度k2=17 000 N/m。用上述的白噪声路面信号作为路面输入信号,仿真时间设定为10 s。为了能评价半主动悬架的控制系统模型的性能,在SIMULINK软件中建立被动悬架的控制系统仿真模型,将同样的参数应用于此被动系统模型中。最后对系统模型进行仿真,得到了半主动悬架与被动悬架的性能曲线,如图3~图8。
从仿真结果曲线可以得出,半主动悬架的车身垂直加速度的均方根值是0.186 m/s2,被动悬架为0.262m/s2,半主动悬架的车身垂直加速度比被动悬架性能改善29%;半主动悬架的动挠度均方根值是0.002 8 m,被动悬架为0.003 4 m,半主动悬架动挠度比被动悬架动挠度性能改善17.6%;在4~8 Hz这个人体敏感的垂直振动频段内,模糊控制的半主动悬架振动能量比被动悬架的能量明显得到衰减。
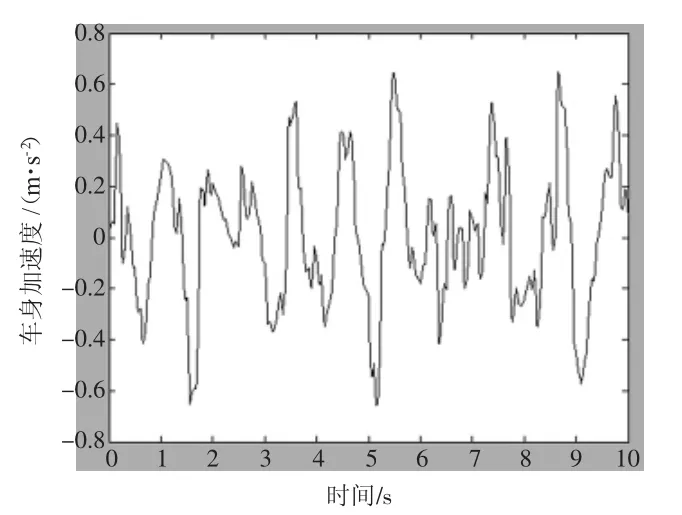
图3 半主动悬架的车身垂直加速度

图4 被动悬架的车身垂直加速度
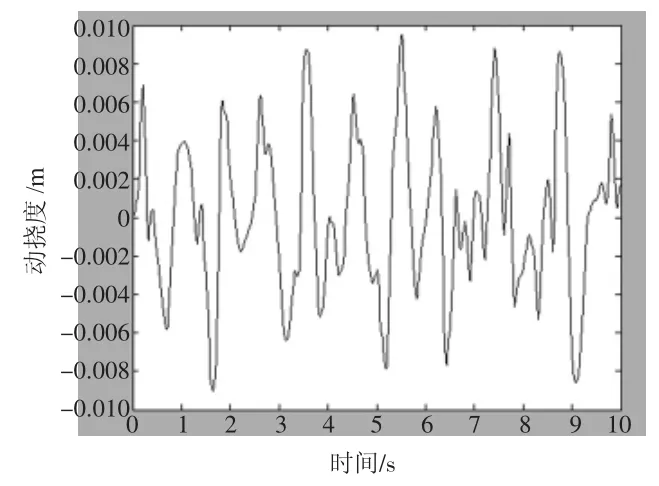
图5 半主动悬架动挠度

图6 被动悬架动挠度

图7 半主动悬架车身垂向加速度的自功率谱密度
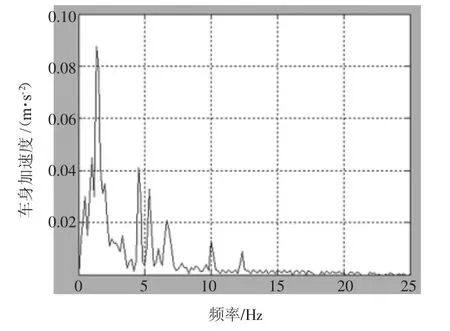
图8 被动悬架车身垂向加速度的自功率谱密度
4 结论
采用模糊控制半主动悬架各项性能指标比传统的被动悬架的各项性能指标更有可行性和有效性。在模糊控制下,半主动悬架有效地降低了悬架的振动强度,改善了人体敏感区域内的振动频率。从而其平顺性和安全性也得到提高,说明所采用的控制方法在研究非线性系统的半主动问题上是成功的。
[1] 董波.主动悬架最优控制整车模型的研究[J].汽车工程,2002,24(5):422-425.
[2] Allotta B,Pugi L,Bartolini F.Design and experimental results of an active suspension system for high speed pantograph[J]. IEEE/ASME Transactions on Mechatronics,2008,13(5):548-557.
[3] 朱明.汽车丰主动悬架系统的建模研究[D].重庆:重庆大学,2004.
[4] 姚俊,马松辉.SIMULINK建模与仿真[M].西安:西安电子科技大学出版社,2002.
(编辑启迪)
Simulation of the Semi-active Suspension with Fuzzy Controlling System
LI Qi, WANG Jingyue
(1.Beijing Hyundai Motor Company,Beijing 100000,China;2.School of Automobile and Transportation, Shenyang Ligong University,Shenyang 110168,China)
The two-degree of freedom model of vehicle suspension is established,then the designing way of automobile the semi-active suspension with fuzzy controller is introduced in fuzzy system.A comparative study is carried out through simulation by using MATLAB/Simulink.It shows that the performances of the semi-active suspension with fuzzy controller are much better than that of traditional passive suspension in the ride comfort.The results show that using fuzzy control can realize the improvement of riding comfort.
vehicle;semi-active suspension;fuzzy logic control;simulation
TP 391.7
A
1002-2333(2014)05-0120-03
李奇(1979—),男,硕士,助理工程师,研究方向为汽车系统动力学及控制;王靖岳(1978-),男,硕士,副教授,研究方向为车辆系统动力学与控制。
2014-03-06
辽宁省教育厅科技研究资助项目(L2012068)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
装备制造技术(2020年11期)2021-01-26
测控技术(2018年10期)2018-11-25
西南交通大学学报(2016年3期)2016-06-15
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2016年2期)2016-02-27
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
电源技术(2015年11期)2015-08-22