
水下机器人电池导轨的设计
2014-07-01 23:36金碧霞
机械工程师 2014年4期
金碧霞
(中国船舶重工集团公司第七一O研究所,湖北宜昌443003)
水下机器人电池导轨的设计
金碧霞
(中国船舶重工集团公司第七一O研究所,湖北宜昌443003)
针对水下机器人电池进出电池舱壳体采用推力进给装置作为驱动力,左右两侧的推力进给装置难以实现同步的问题,设计了一套水下机器人电池导轨。该导轨由“U”型铝型材作为基体,在铝型材上安装滚轮及导向轮,具有摩擦特性好、导向精度高、刚性好、体积小、质量轻、结构简单和工艺性好等优点。由一人操作即可很轻松地实现电池的进出舱动作,无需推力进给装置。
导轨;摩擦特性;导向精度
1 存在的问题
目前水下机器人要完成质量大、体积大的电池进舱固定,一般采用在水下机器人耐压壳体内和电池装配车上铺设相同的角钢轨道,将两段角钢轨道实现无缝对接后,电池沿角钢轨道推入壳体。如中船重工第七一O研究所研发并已定型的T-7产品,中科院沈阳自动化研究所研发并已定型的B-1产品,以及中船重工第七一O研究所正在研制的某大型远程自治式水下机器人,因电池舱壳体内装载的电池重约1.8 t,长度近3 m,在方案阶段样机上都采用上述方案来完成电池的进舱和出舱。
电池进舱或出舱过程示意图如图1所示。
由于角钢与电池之间的摩擦为滑动摩擦,其阻力很大,为此需在电池装配车两侧各安装一套推力进给装置,由左右两个手轮驱动。但在使用中经常出现因左右两个推力进给装置不同步而导致电池跑偏的现象。由于电池与壳体的间隙很小,电池跑偏易造成电池外壳与壳体内壁的相互刮伤,引起电池运行卡滞、电池难以定位等问题。同时由于角钢与电池金属外壳直接接触无任何绝缘,使得电池极端绝缘阻值下降,从而影响电池使用的安全性。
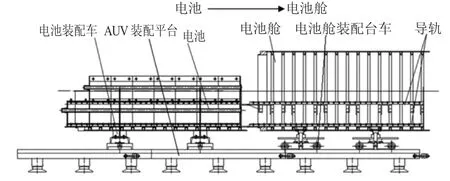
图1 电池组进、出舱流程示意图
2 改进思路
鉴于使电池装配车上的左右推力进给装置达到完全同步,或只用一个手轮同时来驱动两个推力进给装置,从结构和控制上均难以实现,干脆将电池推力进给装置去掉,由1人直接推动电池进舱和出舱。最初思路是想保留原壳体内的角钢轨道,在电池上安装滚轮,虽结构上实现容易,但当电池电量不足或用完要更换新的锂电池时,滚轮若重复利用,就要从原电池上拆卸下来并换装到新的电池上,整个过程费时费力,所以一般会将性能完好的滚轮抛弃不用,这样就造成了大量浪费和增加成本。于是考虑设计一套性能优良的电池导轨,该导轨既要有良好的摩擦特性以便凭一人之力能推动电池,还要有良好的导向能力以避免电池跑偏。目前的工业用导轨主要用于各类机床设备上,大多采用铸铁件或钢件制成,其体积大、质量大,不适合在此使用。为此要设计一套专用导轨,以满足电池进舱和出舱的需要。
3 导轨设计中要考虑的因素
由于该导轨主要在水下机器人上使用,用来引导电池进舱、出舱和提供电池固定的支承平台,考虑到水下机器人设计的总体要求和电池的安全性,除了满足一般导轨的基本性能外,导轨设计中还要考虑下述因素:
1)导向精度。导向精度是电池沿导轨运行的直线度。为了最大限度地利用壳体空间,一般电池舱壳体内壁与电池外壳间隙很小(此水下机器人二者间隙理论上仅3 mm),电池在运行过程中,一旦出现跑偏,可能会造成电池与壳体贴合,增大运行阻力甚至造成两接触面刮伤。
2)精度保持性。精度保持性是指导轨保持其原始精度的时间是否足够长。电池沿导轨长期运行会引起导轨的不均匀磨损,破坏导轨的导向精度。导轨的耐磨性决定了导轨的精度保持性,此外,导轨的结构形式和导轨材料也与精度保持性有关。
3)刚度。因为电池在运行过程中所承受的各种阻力和在舱内固定后自身的重力,最后都转化到导轨面来承受,如果导轨在载荷的作用下产生过大的变形,不仅破坏了导向精度,还恶化了导轨的工作条件。
4)摩擦特性。导轨的摩擦因数较大时,不仅人难推动,并且在电池运行过程中容易产生爬行,影响运动平稳性。
5)体积和重量。在同样的排水量下,要求水下机器人在满足强度和刚度的情况下,各组部件的重量应尽可能地减到最少。
6)绝缘性。水下机器人电池组绝缘性能正交试验结果表明,电池采用整体绝缘(非接地状态),有利于提高电池的极端绝缘阻值。
7)定位。为方便电池舱内导轨与舱外电池装配车上的导轨实现无缝对接,导轨上要设计有定位件。
8)磁性。为最大限度地利用空间,使结构紧凑,水下机器人的电池上方空间一般布置有电子功能设备和线路。如该水下机器人在电池的上方空间装载有导航和中控电子功能设备,为减小其电磁干扰,要求舱内尽可能无磁或低磁。
9)结构工艺性。设计导轨时,还要综合考虑制造的工艺性和维护的方便性,同时要具有一定的互换性。
10)成本。成本因素包括制造导轨所用的材料成本、制造工艺和维修成本,它决定了导轨应用的普及性。
4 导轨的设计
综合考虑以上各因素,最后采用滚动直线导轨作为电池的运行轨道。这是因为与滑动导轨较大的滑动接触面积相比,滚动导轨具有最小的接触面积,能较大地减小摩擦。为防止电池在进舱和出舱的过程中偏,在导轨两侧设计有导向轮,引导电池按给定方向沿直线运动。在导轨前端设计有定位销孔座,通过孔座与外导轨上定位销的配合来实现内外两段导轨的对接。导轨基体采用“U”型铝型材,这是因为铝型材成本低、成型快、重量轻、加工容易,并且已系列化和标准化。连接标准件和轴承选用不锈钢材质,以满足导轨无磁或低磁要求。滚轮圈和导向轮圈采用尼龙材料制作,以满足与电池外壳绝缘的要求。导轨由“U”型铝型材、导轨安装座、滚轮、导向轮、定位销孔座等组成。电池导轨结构示意图如图2所示。滚轮及导向轮结构示意图如图3所示。
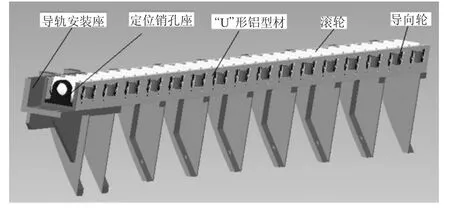
图2 电池导轨结构示意图
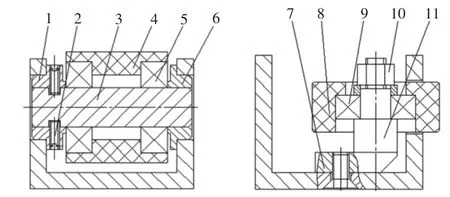
图3 滚轮及导向轮结构示意图
5 结语
针对目前水下机器人要完成质量大、体积大的电池进舱固定,左右两侧的推力进给装置难以实现同步的问题,设计了一套电池导轨。该导轨由“U”形铝型材为基体,在铝型材上安装滚轮及导向轮,在水下机器人样机上经过反复使用,可单凭一人之力就能很轻松地实现电池的进舱和出舱运动,无需推力进给装置。
该导轨具有以下优点:1)导轨导向精度高,两侧的导向轮可引导电池沿直线运动,无偏置;2)导轨刚性好,无机械变形;3)精度保持性好,无机械磨损;4)有良好的摩擦特性,由1个人即可推动电池,而且电池运行平稳,无低速爬行现象;5)具有体积小、质量轻、结构简单、工艺性好等特点。
(编辑:启 迪)
TP 242
B
1002-2333(2014)04-0219-02
金碧霞(1977—),女,工程师,主要研究方向为水下机器人结构设计。
2014-01-23
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
现代机械(2021年4期)2021-09-03
中国特种设备安全(2019年7期)2019-09-10
冰雪运动(2019年2期)2019-09-02
制造技术与机床(2018年8期)2018-10-09
新能源科技(2018年10期)2018-02-15
制造技术与机床(2017年2期)2017-05-04
制造技术与机床(2017年12期)2017-02-02
阅读(中年级)(2016年11期)2017-01-23
现代制造技术与装备(2015年4期)2015-12-23
