
一种航天器有效迎风面积的求解方法
2014-09-15 05:44朱战霞裴韶彬唐歌实李勰马家瑨
飞行力学 2014年3期
朱战霞, 裴韶彬, 唐歌实, 李勰, 马家瑨
(1.西北工业大学 航天学院, 陕西 西安 710072;2.航天飞行动力学国家重点实验室, 北京 100094;3.北京航天飞行控制中心, 北京 100094)
0 引言
大气阻力模型精度是影响轨道确定及预报精度的主要因素之一。对于低轨航天器,大气阻力模型精度主要取决于大气密度、阻力系数以及有效迎风面积的精度。现有大气密度模型已比较精确并得到了普遍应用,如CIRA系列、DTM系列、Jacchia系列、MSIS系列等[1]。另外,由于轨道环境中自由分子流假设成立,故可认为在轨航天器的阻力系数为常数。因此,有效迎风面积就成为影响大气阻力模型精度的一个关键因素。
目前,大气阻力建模时,迎风面积通过两种方式获得,一种方式认为迎风面积为常值;另一种是将迎风面积作为参数和轨道参数一起估计。对于复杂外形且姿轨运动形式变化多样的航天器,前一种精度太差,后一种不易求解。为此,国内外学者提出了一些新方法[2-6],例如基于3DMAX和数据拟合技术[2]、B样条曲线曲面造型和包含互斥理论[3]、各类几何及拓扑变换模型[4]等新方法,可有效解决计算精度不高的问题,但这些方法以飞机为对象,对于航天器其适用性有待于进一步检验。另外,也有学者针对航天器研究了考虑遮挡的投影面积求解问题[5-6],对于较简单的空间任务,可在一定程度上提高迎风面积的计算精度。但是针对未来复杂操作任务轨道的精确确定及预报,其精度还有待于进一步提高。
为此,本文提出基于微元思想建立航天器网格模型以求解有效迎风面积的方法,并通过结合Graham’s Scan法和射击线扫描法,进行航天器各部分轮廓的确定,以实现有效迎风面积的准确求解。
1 航天器三维模型建立
1.1 基于微元划分思想的三维建模方法
航天器在其速度矢量法平面上的投影,即为有效迎风面积。考虑到飞行过程中的姿态变化,各部分(例如主体、太阳能帆板、各类载荷等)之间会存在相互遮挡,且当航天器外形复杂、外表面有曲面时,三维建模将无法用较少的节点确定其形状和轮廓,导致无法精确求解有效迎风面积。为此,本文引入微元划分的思想进行航天器三维建模,即把航天器表面划分为有限个微元,保证有足够的节点信息描述各表面特性,以精确确定航天器的形状和轮廓。建模时,基于Pointwise进行微元网格划分,利用四边形网格对航天器各表面进行逼近。
为了便于对航天器各部分独立处理,本文提出采用分块建模的思想建立三维网格模型,即在航天器本体坐标系下分别建立航天器主体、太阳能帆板及其他载荷的模型,但各部分模型均可独立导出。这种网格模型建立方式,使航天器上活动部件的运动(太阳能帆板的旋转)能够独立描述,同时也使生成的网格模型具有很强的扩展性,并能充分利用已有的网格模型。例如,对于交会对接等任务,若两航天器各自的网格模型已存在,则只需将其统一在同一坐标系下即可进行后续计算,可避免重复建模,减小网格建模工作量。
1.2 航天器网格模型在速度矢量法平面内的投影

(1)
(2)

(4)
对于航天器三维网格模型上的所有节点,其在航天器速度坐标系下的投影将构成一个点集。针对此点集,进行凸包求解以确定投影轮廓,进一步可求得有效投影面积。
2 航天器有效迎风面积的求解算法
针对航天器运动过程中各部件之间存在遮挡的情况,本文提出基于Graham’s Scan法和射击线扫描法的有效投影面积求解算法,即采用Graham’s Scan法进行凸包求解以确定投影轮廓,之后采用射击线扫描法进行有效迎风面积的求解。该方法可有效避免航天器实际飞行时各部分间的遮挡及太阳能帆板的旋转引起的迎风面积重叠,实现有效迎风面积的准确求解[7]。
2.1 航天器各部分投影轮廓的确定
航天器各部分的投影轮廓通过求解网格节点在速度矢量法平面内投影点集的凸包确定。目前,平面点集的凸包求解方法较多,其中最常用的是包裹法及Graham’s Scan法。由于Graham’s Scan法实现简单、效率高且精度较好,故本文采取此方法进行凸包的求解。Graham’s Scan法是一种试探性增长凸包的方法,其思想如下:
(1)排序:设投影得到的平面点集为Q,在点集Q中,求得纵横坐标都最小的点作为初始点p0。计算该点和其他各点的连线与横坐标正向的角度,按从小到大将这些点排序,若有角度相同的情况,优先排列最接近p0的点,经过排列后,称它们的对应点为p1,p2,p3,…,pn。
(2)扫描:从初始点开始,凸包上每条相邻线段的旋转方向应该一致,并与扫描的方向相反。如果发现新加的点使新线段与上一条线段的旋转方向发生变化,则可判定上一个点必然不在凸包上。
若航天器某部分网格在投影平面内的点集为Q,那么基于以上方法,求解点集Q所对应的凸包,即得到投影轮廓。
2.2 航天器有效迎风面积的确定
航天器有效迎风面积即航天器各部分在速度矢量法平面内投影轮廓的并集。基于前面得到的投影轮廓,采用射击线扫描法,可以求得航天器有效迎风面积。步骤如下:
(1)确定投影平面内航天器各部分轮廓点的坐标范围。找出航天器各部分投影轮廓点的yv坐标的最大值yvmax和最小值yvmin,zv坐标的最大值zvmax和最小值zvmin。
(2)划分网格确定射击线。由直线y=yvmax,y=yvmin和z=zvmax,z=zvmin确定其所围成的平面矩形区域S。选定yv方向和zv方向的步长分别为Δyv和Δzv,将平面矩形区域S划分成面积等于Δyv×Δzv的N个小网格,如图1所示。在每个网格内产生一条垂直于投影平面Oyvzv的射击线(图中的黑点),且使各射击线在投影平面的投影点位于各个小网格的中心,共计N条。
(3)射击线投影点的扫描判断。生成N条射击线后,若投影点在航天器任一部分的投影轮廓内,则认为该射击线所在的面积为Δyv×Δzv的小网格属于航天器各部分投影轮廓的并集区域。从射击线1到射击线N的顺序对航天器在速度矢量法平面内的投影进行扫描,统计出满足在航天器任一部分的投影轮廓内的射击线投影点的个数,将其乘以每个小网格的面积(Δyv×Δzv)即可得到总面积St。
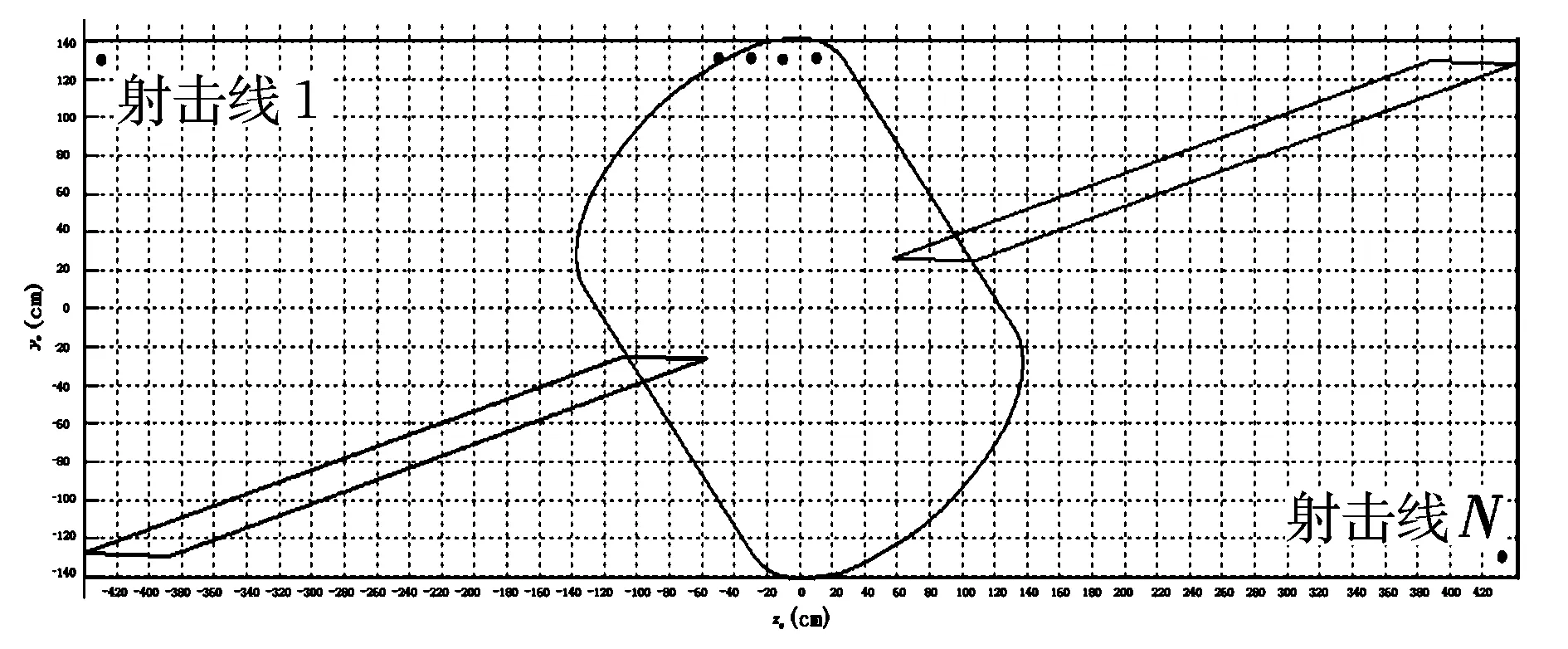
图1 轮廓点坐标范围的确定Fig.1 Confirmation of the coordinate scope of points
由于射击线扫描法是按从射击线1到射击线N的顺序依次扫过平面矩形区域S,投影点包含于航天器任一部分的投影轮廓内即将该投影点计数,如果射击线投影点同时在多个部分的投影轮廓内,说明这几个部分存在互相遮挡的情况,不再对该投影点进行重复计数,故总面积St就等于航天器的有效迎风面积。因此,该方法有效地解决了传统方法中有效迎风面积计算时遮挡面积重复计算的问题。
3 算例与分析
为验证本文方法和算法的合理性与精度,以带有太阳能帆板的航天器为例,对不同姿态、不同帆板旋转角度下的有效迎风面积进行求解,并与参考值进行对比分析。给定航天器的外形参数如下:主体为圆柱体,底面直径为1 m,高为1 m;太阳能帆板为长方形,长为3 m,宽为1 m,帆板旋转轴通过航天器主体质心,与航天器本体坐标系的zb轴平行。
利用前文所述的基于微元划分思想建立该航天器的三维网格建模,并对主体和太阳能帆板单独建模。对于主体,各边节点均取为20,对于太阳能帆板,用四个顶点坐标表示。最终生成的网格模型如图2所示。
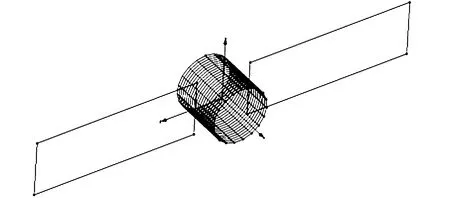
图2 航天器的网格模型Fig.2 Grid model of spacecraft
基于此模型,利用本文算法进行有效迎风面积的计算。由于航天器需对地定向,故一般飞行过程中只考虑侧滑角,表1给出了几种典型飞行状态下的有效迎风面积计算结果。表中参考值是通过在pro/e(专用软件)中建立相应航天器模型由软件直接给出的。
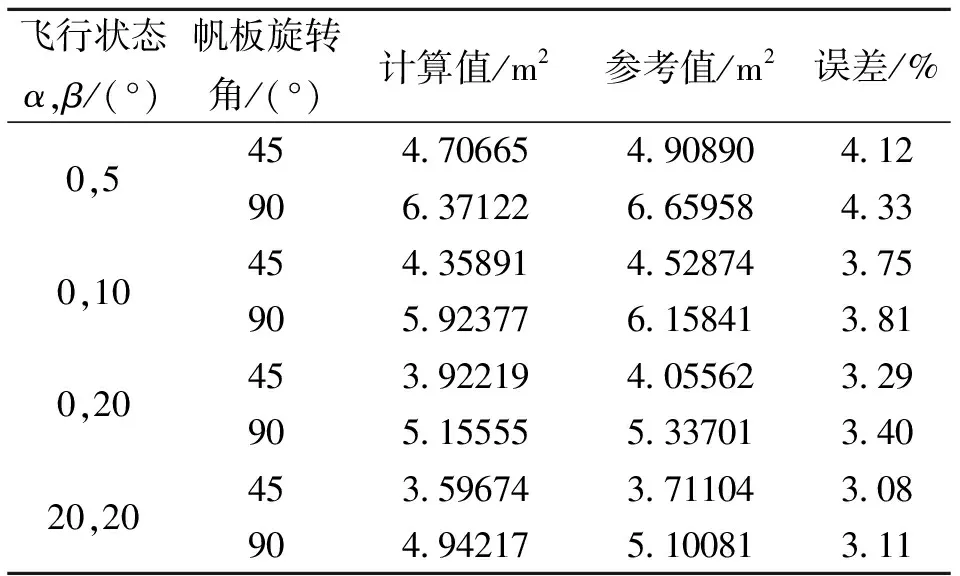
表1 不同飞行状态及帆板旋转角下航天器的有效迎风面积计算值及参考值 Table 1 Computed value and theory value of front face area under different flight conditions and sailboard rotating angle
将计算值与参考值比较可知,本文方法所得结果与参考值的误差小于5%,说明算法比较合理。
另外,在研究过程中也针对其他飞行情况进行了大量的计算,对结果统计之后发现,与参考值的误差均在10%以内,进一步验证了算法的合理性和精度。同时还发现,有效迎风面积的计算精度受射击线个数影响,射击线个数越多,计算精度越高。究其原因在于本文算法中射击线个数与网格个数相同(每个网格内产生一条垂直于投影平面的射击线),射击线越多,则网格划分越细,越接近于实际表面形状和轮廓,因此计算精度越高。建议实际使用中可以适当增加射击线个数以提高计算精度。
4 结束语
复杂外形航天器姿态变化过程中,有效迎风面积精确求解困难,会影响大气阻力建模精度。本文基于微元划分思想建立航天器三维网格模型,采用了分块建模方法,可独立描述航天器上不同活动部件,网格模型具有很强的扩展性,且能充分利用已有网格模型实现多载荷系统的快速建模。在此基础上提出的航天器有效迎风面积求解方法,可解决航天器各部分间存在遮挡、太阳能帆板转动情况下有效迎风面积准确求解的问题。该算法具有工程实用性,可提高低轨航天器大气阻力模型精度,有利于航天器精细模型的建立。
参考文献:
[1] AIAA.Guide to reference and standard atmosphere models[M].USA:American Institute of Aeronautics and Astronautics,2010.
[2] 王涛,唐宴虎,简洁.基于3DMAX的飞机命中面积计算方法[J].火力与指挥控制,2008,33(8):62-68.
[3] 徐元铭,尤伟,王永庆.军机易损性分析中多重遮挡投影面积计算[J].北京航空航天大学学报,2002,28(2):245-248.
[4] 何光武,张金钟.飞机武器系统易损性评价中几何描述研究[J].沈阳航空工业学院学报,1998,15(2):31-37.
[5] Erwan Mazarico,Zuber Maria T.Improved force modeling on mars-orbiting spacecraft[C]∥AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Honolulu,Hawaii:AIAA,2008.
[6] Erwan Mazarico.Study of the martian upper atmosphere using radio tracking data[D].USA:Massachusetts Institute of Technology, 2008.
[7] 裴韶彬.近地航天器大气阻力精细建模研究[D].西安:西北工业大学,2013.
猜你喜欢
国际太空(2022年7期)2022-08-16
文萃报·周二版(2022年24期)2022-06-16
新教育时代电子杂志(教师版)(2022年31期)2022-02-09
发明与创新(2021年39期)2021-11-05
小哥白尼(军事科学)(2021年6期)2021-11-02
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
军事体育学报(2016年2期)2016-06-15
空间控制技术与应用(2015年4期)2015-06-05
