
AIS的解码及其在航道通航环境评估中的应用
2014-09-26 03:47薛玉成
电子设计工程 2014年1期
薛玉成
(上海海事大学 信息工程学院,上海 201306)
目前,我国海洋经济年均增速为13.6%,占GDP比重越来越大,所以海洋安全非常重要。海上交通越来越受到人们的重视,许多学者对进港航道水域通航环境进行了分析研究。刘天喜等[1]探讨了主要涉及到评价指标的选取、权重的计算和评价方法的确定,通过层次单排序法建立评价矩阵得出影响通航环境的主要因素;吴国栋等[2]通过专家调查数据的统计和分析,利用层次分析法获得各评价因素的权重,对烟台港航道环境安全模型进行综合评价,并给出了相关建议;刘永强[3]应用未确知测度理论建立了深圳港西部航道水域引航安全评估模型。
虽然上述方法可行且考虑全面,但是数据项较多、数据获取困难且计算繁琐复杂,实用性不足。随着AIS(船舶自动识别系统)技术的发展,潘家财[4]等人利用数据挖掘技术提出了一种通过航速(航向)变化率来反应航道通航环境的方法。
文中分析了已有航道评估方法航速(航向)变化率法在航道通航环境评估中的不足和缺陷,提出了航速(航向)权重法对航速(航向)变化率法进行了优化,使得结果更加精确,并且对评估结果提出了一种量化指标。
1 AIS简介及解码
1.1 AIS简介
AIS(Automatic Identification System),船舶自动识别系统,船舶的AIS报文反应出了船舶的动态、静态和航行安全相关的信息。AIS的语句种类分为明码和暗码。暗码是以‘!’字符开始的语句,这种语句是将真实信息经过压缩编码后形成的,所以要对接收到的暗码进行解码才能获取有用信息。
暗码语句的结构如下:
!AIVDM,X,Y,Z,S,C-V*HH,〈CR〈LF>
!:表明本语句为暗码语句;AIVDM:标识符,指明本条语句封装的背景信息;X:发送该信息需要的句子总数(1~9);Y:本句的句子序号(1~9);Z:连续信息的识别(0~9);S:表示接收该条语句的AIS信道号(A/B);C-C:数据段,为封装信息,即数据部分;V:填充字段,因为封装的字符需要是6的整数倍,若不满足则需填充0~5个字符;HH:表示校验字段,用以判断该条语句在传输过程中是否受干扰而出错。
1.2 AIS解码
AIS解码流程[5-6]为:1)校验语句是否正确:校验就是将‘!’和‘*’之间的所有有效字符的ASCII码进行异或操作,将异或结果与语句中‘*’后面的两个字符进行比较,如果相同,则语句正确,否则,语句错误。错误很可能是由于在信息传输过程中受外界干扰造成的。2)判断报文消息ID(识别码):报文的解码是将数据段的ASCII码转化成6 bit二进制,然后根据各参数所占的比特数进行解析。所有的报文的信息ID都是最前面的6 bit,也就是数据段的第一个字符。3)解码:提取出报文的数据段,根据消息ID,调用相应解码程序进行解码。对某艘船舶的AIS报文解码信息表1所示,前两列是船舶的一些动态信息,后两列是船舶的一些静态信息。
2 基于AIS的航道通航环境评估
2.1 航速(航向)变化率法
在基于AIS的航道通航环境评估方面,潘家财曾提出这样一个理论:一片水域的通航环境好坏,可以根据历史船舶经过该水域时船舶的航速及航向变化率来间接的反应。假如有一片通航环境不好(船舶拥挤等)的水域,则当一艘船舶经过该水域时,该船舶就必须不停的通过改变航速和航向来避免与其他船舶等发生碰撞;如果是一片通航环境良好的水域,那么船舶会按照已设定的航速和航向航行,就不必不停地改变航速和航向了。所以对船舶经过一片水域时的航速及航向变化率的研究对航道通航环境的评估具有一定参考价值。
采用公式(1)来获取船舶的航速及航向变化率。
航速(航向)变化率=相邻时间航速(航向)差值/相邻时间间隔…… (1)
公式(1)中的航速(航向)值和相邻时间间隔来自于对接收到的船舶的AIS报文的解码所得。本文选择了2012年7月17日航行在上海市浦东新区和长兴岛之间航道的船舶“SHANGHAI SUPEREXPRES”的数据进行了研究,由解码后数据绘制出图1船舶平面航迹图和图2船舶航迹在Google Earth上显示的航迹实况图。

图1 船舶平面航迹图Fig. 1 Planar track map
对该艘船舶的AIS报文解码后进行数据挖掘处理分析的结果进行可视化显示如图3所示。图3中的(a)图是船舶的航迹图及航速变化率和航向变化率随航迹的变化情况;(b)图表示船舶的航向(COG)在二维图中随航迹的变化,其中航迹选经度表示;(c)图表示船舶的航速(SOG)在二维图中随航迹的变化,航迹也选经度表示。由图3中(a)图可知船舶在其整个航行区间内其航速和航向变化率都有不同程度的变化,由(b)图和(c)图可以定位航向和航速变化较明显的航行区域,当船舶航行在121.625°E—121.725°E区间内其航速和航向都有较明显的变化。而根据图1船舶平面航迹图可知,船舶大概在121.67°E—121.70°E区间航行时较明显地改变了航线,由此可知,航速(航向)变化率法的评估精确度不理想。
2.2 航速(航向)权重法
2.2.1 定性评估
前面介绍的航速(航向)变化率法具有一定的合理性,但是评估结果是由航速变化率和航向变化率两个变化量共同影响的,此方法将两个变化量分开单独考虑,可能是导致评估精确度不理想的原因。
文中提出了一个对其进行优化改进的方法:航速(航向)权重法。航速(航向)权重法对航速变化率和航向变化率这两个变化量进行了简化,选择了新参数航速变化量和航向变化量,并将新的参数进行了综合考虑得到一个航速航向总变化量df,并且分别给航速变化量和航向变化量分配权重,利用总变化量随船舶航迹的改变情况来评估航道通航环境。根据经验,当船舶遇到紧急交通拥挤时,多数情况下主要是实行改变航向,辅助于改变航速来保证船舶自身的航行安全,所以航向变化量的权重(β)要比航速变化量的权重(α)要大。df的值由公式(2)确定。df=相邻时间航速变化量(dsog)2a+相时间航向变化量

图2 船舶航迹实况图Fig. 2 The ship track live diagram
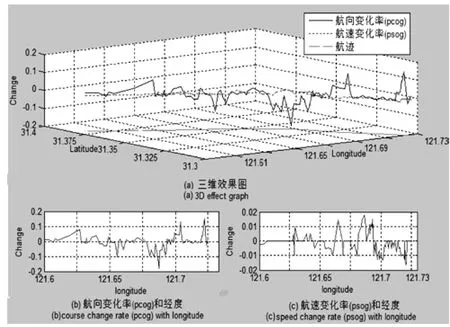
图3 航速(航向)权重法Fig. 3 Speed ( heading ) weight method

图4 航速(航向)权重法Fig. 4 Speed ( heading ) weight method

图5 预测问题水域与实际问题水域的6种相对关系Fig. 5 Six kinds of relative relationship between the predicted and actual problem waters
根据经验,航速变化率权重α=0.4,航向变化率权重β=0.6。
实验结果如图4所示。图4中的df=dsog2*α+dcog2*β为由航速变化量(dsog)和航向变化量(dcog)构成的总变化量。图4中的(a)图很明显的显示出当船舶航行在121.65°E—121.70°E区间时航速航向总变化量df有十分明显的变化,由(b)和(c)图可以精确的定位通航环境问题水域为121.68°E—121.70°E,31.33°N—31.345°N区间。航速(航向)权重法综合考虑了两个变化量对结果的影响,比航速(航向)变化率法评估精确度更高。
2.2.2 量化指标
预测问题水域和实际问题水域的相对关系有图5中6种关系。其中,pl为预测问题水域的长度,L为实际问题水域的长度,r0为pl与L的交集,r1为预测冗余段(r1=pl-r0)。由图知,情况(a)和(b)的预测完全无效,情况(c)、(d)、(e)和F是有效的。我们引入预测完整度和预测冗余度两个量化公式来量化其准确性程度,预测完整度越大、预测冗余度越小说明预测结果的准确性越高。公式如式(3)和式(4)。

pl的确定依赖于评估算法;L的确定引入了方差理论和波动说,根据船舶的航向的均值求出航向的一次波动,由于一次波动求出的L与船舶的航迹相比较并不是很理想,所以引入了二次波动,由其一次波动的均值求出其二次波动,由二次波动求出的L经实验证明,效果是很好的。表2和图6列出了航速(航向)变化率法的航速变化率(psog)、航向变化率(psog)与航速(航向)权重法中的总变化量(df)的预测结果。
图6中,pl_psog是由航速变化率预测的问题水域,即图中两个上三角之间的航迹区间,pl_pcog是由航向变化率预测的问题水域,即图中两个加号之间的航迹区间,pl_df是航速(航向)权重法预测的问题水域,即图中两个圆圈之间的航迹区间,L是实际的问题水域,即图中两个星号之间的航迹区间。由表2和图6知,航速(航向)变化率法预测结果的完整度很高,但是其冗余度也很高;航速(航向)权重法预测结果极大的降低了预测冗余度,同时又具有很高的完整度,所以预测结果非常理想。

表2 预测结果的表格比较Tab.2 Table comparison of the prediction results
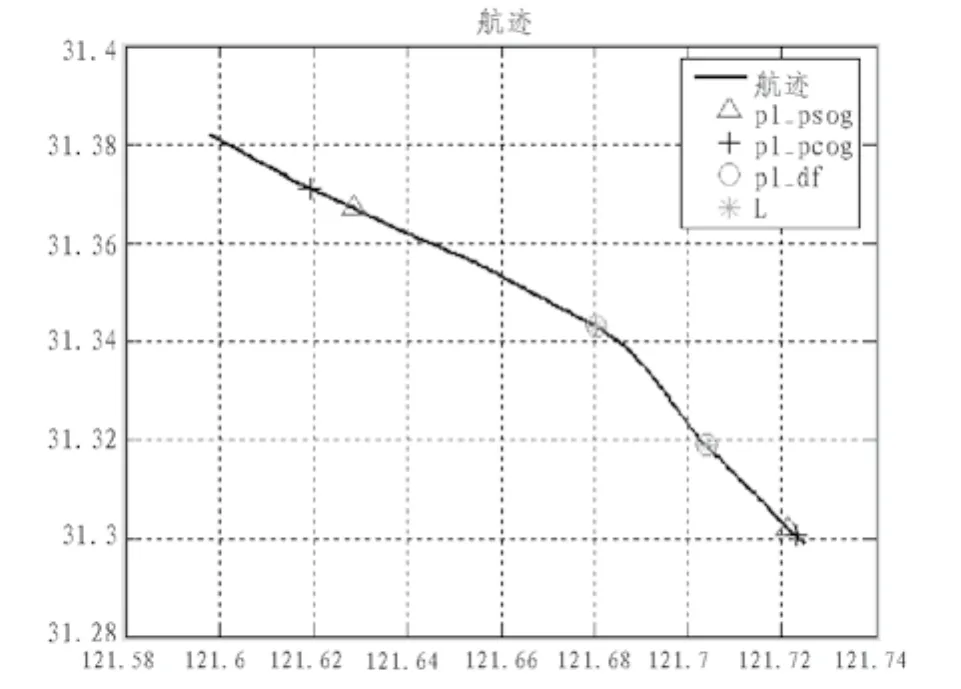
图6 预测结果的图比较Fig. 6 Map comparison of the prediction results
3 结束语
文中对AIS作了简单的介绍,文章第二部分在基于解码出的AIS数据的基础上,分析了基于AIS的现有航道通航环境评估方法航速(航向)变化率法的缺陷,对其进行优化,提出了评估效果更好的航速(航向)权重法。同时文中提出了评估结果的量化指标,使得实验结果具有更高的客观性和科学性。本文提出的航速(航向)权重法的实验结果虽然较航向(航速)变化率法的实验结果有更高的精度,但是理论依据不充分,有待进一步完善。量化指标中的实际问题水域的长度L的提出仅是从船舶的航向变化来反应船舶航行状况,此研究有待进一步深入。
[1]刘天喜,黄秋赢.对影响沿海海域主航道通航环境因素的评估[J].航海工程, 2011 (4):23-25.
LIU Tian-xi, HUANG Qiu-ying.Research on comprehensive assessment of navigational environment of the fairway in sea areas[J]. Marine Engineering, 2011(4):23-25.
[2]吴国栋,姚 烟台港航道通航环境模糊综合评估[J].中国水运,2011,11(1):8-9.
WU Guo-dong,YAO Kun.Navigation environment fuzzy assessment in Yantai port[J].China Water Transport, 2011,11(1):8-9.
[3]刘永强.深圳港西部航道水域引航安全评估[J].中国水运,2011,11(6):13-15.
LIU Yong-qiang. Safety assessment in west channel of Shenzhen port[J]. China Water Transport, 2011,11(6):13-15.
[4]潘家财,邵哲平,姜青山.数据挖掘在海上交通特征分析中的应用研究[J].中国航海.2010,33(2):60-62.
PAN Jia-cai, SHAO Zhe-ping,JIANG Qing-shan. Application of data mining technology in analysis of marine traffic characteristics[J].Navigation of China,2010,33(2):60-62.
[5]黄丽卿, 胡稳才,邵哲平.AIS输出数据包的解包技术研究[J]. 集美大学学报,2005,10(1):37-41.
HUANG Li-qing,HU Wen-cai,SHAO Zhe-ping. Study on techniques of decoding output data packages from AIS[J]. Journal of Jimei University,2005,10(1):37-41.
[6]莫红飞,张勇.AIS数据解码分析[J].计算机光盘软件及应用,2012(6): 60-61.
MO Hong-fei,ZHANG Yong.Decoding and anlysis of AIS data[J].Computer CD Software and Application,2012(6):60-61.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
舰船科学技术(2022年10期)2022-06-17
水上消防(2022年1期)2022-06-16
湖南电力(2021年4期)2021-11-05
新世纪智能(高一语文)(2021年3期)2021-07-16
初中生世界·九年级(2020年9期)2020-09-21
民用飞机设计与研究(2019年4期)2019-05-21
舰船科学技术(2018年7期)2018-07-25
电子制作(2017年24期)2017-02-02
电测与仪表(2016年14期)2016-04-11
