
“十字”鸭舵控制低旋尾翼弹方法研究*
2014-11-23 07:54
舰船电子工程 2014年1期
(海军装备部某军代室 太原 030027)
1 引言

图1 制导炮弹结构示意图
随着现代战争对弹药精确打击能力要求的提高,各种低成本制导弹药成为弹药行业的重点发展方向之一。其中采用鸭舵,通过弹体自旋对高低和侧偏两个方向进行控制是一种较为有效的弹道控制方法。炮射制导弹药由于受其空间体积与飞行特性限制,一般采用鸭式气动布局。与脉冲发矢量的有限次作用不同,鸭舵可进行连续控制,能扩大弹道控制范围并提高命中率[1~5]。某型舰载炮射增程制导弹药采用鸭式布局和旋转双通道控制原理,其控制力来源于由两个电机驱动两对对称且垂直安装的“十字”鸭舵,结构示意图如图1所示。只有舵机能够实时准确产生控制系统解算出的弹体需要的控制合力及方向,才能使弹体产生所需的过载,使制导弹药沿理想弹道飞行并精确命中目标。本文为解决“十字”鸭舵如何实时、准确提供旋转弹体需要的横向和高低方向控制力问题,根据其结构和特点,研究了由弹体转速和姿态角及弹体所需控制力求解两对舵实时舵偏角的方法。经试验验证依据该方法进行鸭舵控制时,能够实时、准确得到弹体所需控制力。
2 程控飞行鸭舵控制方法
程序控制飞行是制导弹药进行控制系统原理验证的一个重要环节[6~7]。该制导弹药在程序控制飞行中要求弹体控制合力在铅垂面内向上,进行重力补偿的同时实现弹体的滑翔控制飞行。
假设任意时刻,弹体所需向上控制力为F,即铅垂方向合力FY=F,水平方向合力FZ=0。假设t=0时刻为正姿态(滚转姿态角q=0°,水平舵舵1在水平位置,铅垂舵舵2在铅垂位置),则舵机1、2产生的控制力为:F1=F,F2=0,此时Fy=F1=F。如图2所示。

图2 滚转姿态θ=0°时程序控制示意图
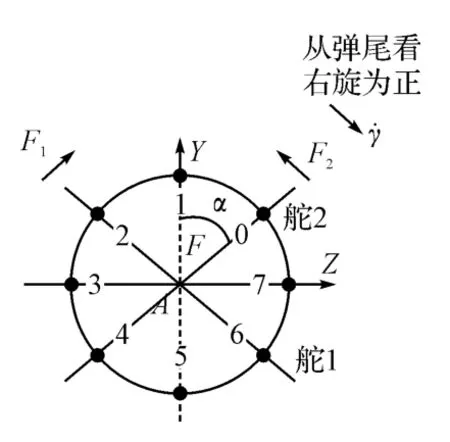
图3 滚转姿态θ=α时程序控制示意图
假设弹体右转α角度时,舵机位置如图3所示。合力为F,舵1和舵2的控制力方向与铅垂方向都存在α角度方向偏差,必须两舵同时作用形成合力[8~10]。由力学原理可知:

解方程式(1)得:

假设任意时刻由弹体姿态测量装置测得此时的滚转姿态角θ=θ0+wt,其中w为弹体转速,θ0为弹体初始姿态角。将θ=θ0+wt代入式(2)得:

考虑舵机作为执行机构存在延迟,假设延迟时间为T,则系统必须对延迟进行补偿,将延迟补偿加入式(3)得:

根据舵偏角和舵控制力的关系即可得到两个舵机的舵偏角,假设舵控制力和舵偏角成比例关系(Fd=mδ,其中Fd为舵控制力,δ为舵偏角,m为比例系数),则

3 制导控制飞行舵控方法

图4 滚转姿态θ=α时,控制力方向为φ 的制导飞行控制示意图
制导控制飞行是制导弹药进行控制系统精度验证的一个重要环节。它要求舵机实时、准确提供制导弹药所需控制力。假设θ为滚转姿态角,φ为控制合力方向,两个角度都以从弹尾看向上为0 位,右旋为正,F为合力,弹体在正姿态上,F1向上为正,F2向左为正,如图4所示。由图中力学关系可以得到:

解方程组得:

则

考虑舵机作为执行机构存在延迟,假设延迟时间为T,则系统必须进行补偿,则

根据舵偏角和舵控制力的关系即可得到两个舵机的舵偏角。

由式(5)和式(10)对比可知,程序控制是制导飞行控制的一种特殊形式,即当φ=0,制导飞行控制方程等同于程序控制方程。
4 试验验证

图5 舵机反馈曲线图
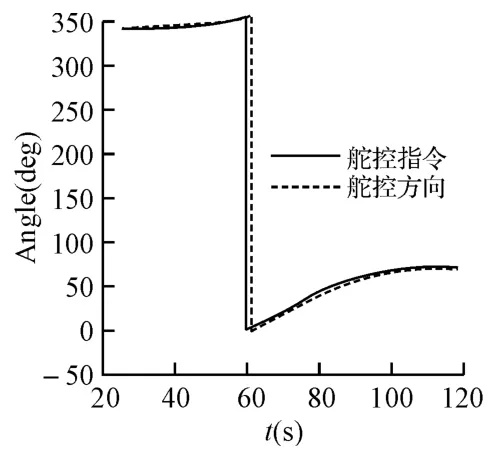
图6 风洞试验理论合力方向和实际合力方向对比图
为了验证控制方程的正确性,将制导弹放在风洞中进行吹风打舵试验。试验中首先定性地对制导弹舵控合力方向进行观察,合力方向基本满足要求;同时用黑匣子记录每一时刻舵机反馈信号(如图5所示)及弹体姿态角,数据处理的结果如图6所示,舵机形成的合力方向和控制系统输出的合力方向基本一致。由此得到该舵控方程正确、可行。
5 结语
本文根据制导弹药“十字”鸭舵的特点,由弹体滚转姿态角和转速,推导了将控制系统解算的弹体所需控制力分配到两对舵机的舵控方程,经试验验证,鸭舵生成的合力和控制系统解算得到的合力大小和方向均一致。为研究方便,文中假设所需控制力和舵偏角成线性关系,在实际应用中可以将控制力与舵偏角的非线性关系加入控制方程中。该控制方法已在某弹药中得到应用,具有较高的工程应用价值。
[1]Mark F Costello.Potential Field Artillery Projectile Improvement Using Movable Canards[R].ADA324372,1997.
[2]任克伟,徐军,孟吉红,等.制导火箭弹射程导引的一种新方法[J].弹箭与制导学报,2007,27(2):119-121.
[3]Ollerenshaw D,Costello M F.Model predictive control of a direct fire projectile equipped with canards[J].Journal of Dynamic System,Measurement and Control,2008,130(061010):1-11.
[4]Dean M.Guidance,navigation and control munitions[D].Philadelphia,USA:Drexel University,2008.
[5]李岩,王中原,易文俊,等.鸭舵控制的防空制导炮弹重力补偿分析[J].弹道学报,2008,20(4):32-35.
[6]陈智刚,王志军,C.N.斯特列夫.运用地磁传感器对旋转弹进行程序控制[J].华北工学院测试技术学报,2001,15(3):169-170.
[7]王江,林德福,祁载康.末端修正迫弹程控系统设计参数辨识[J].战术导弹技术,2008(6):75-77.
[8]李岩,王中原,易文俊,等.基于鸭式布局的有控弹药攻角运动仿真研究[J].南京理工大学学报(自然科学版),2009,33(2):242-246.
[9]娄寿春.导弹制导技术[M].北京:宇航出版社,1989:70-74.
[10]孙东阳.滑翔增程制导炮弹控制系统设计与分析[D].南京:南京理工大学,2012:9-10.
[11]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008:29-35.
猜你喜欢
文史春秋(2022年4期)2022-06-16
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
数学大王·趣味逻辑(2021年3期)2021-03-10
民用飞机设计与研究(2020年4期)2021-01-21
家庭影院技术(2020年6期)2020-07-27
新课程·中学(2019年7期)2019-09-17
汽车观察(2018年12期)2018-12-26
数学大世界(2018年1期)2018-04-12
物理教学探讨(2018年1期)2018-02-13
商场现代化(2016年12期)2016-06-06
