
四足仿生移动平台技术发展综述及关键技术分析
2014-12-03 06:29刘大鹍姚其昌
车辆与动力技术 2014年1期
江 磊,刘大鹍,胡 松,苏 波,姚其昌
(中国北方车辆研究所,北京 100072)
与其它移动装置 (轮式、履带式、爬行式等)相比,四足仿生移动平台与地面接触点是离散的,可以选择合适的落脚点来适应崎岖的路面,因此它具有高度的适应性与灵活性,它既可以在平地行走,也可以在复杂的非结构化环境中行走,如在凹凸不平的地面行走、上下台阶和斜坡、跨过溪流、跋涉沼泽,等等.这一特点使四足仿生移动平台克服非结构化路面的能力非常大,非常适合在高原山地、救援救灾等条件下工作.
正是因为足式移动方式具有在无路面越野条件下的天然优势,国内外研究学者开展了大量的研究工作,特别是对于四足机器人.早期四足移动装置一直无法解决能耗问题,行驶速度低,输出力矩小,无法满足越野行走的各种环境条件要求.现阶段,随着新的设计方法、控制算法、液压系统、机器人及计算机技术的发展,步行移动平台的能耗问题得以初步解决,最高行驶速度理论上能够达到130 km/h 以上[1].
1 早期四足机器人技术发展现状
早期四足机器人研究的代表是日本东京工业大学的広濑·福田机器人研究实验室.从80年开始至今已研制出3个系列12款四足机器人.其中最有代表性的是TITAN系列机器人TITAN—VIII,见图1.该款机器人的软硬件齐全,功能比较完备,具有多种运动步态选择.在该机上配套先进而完整的专门针对四足移动机器人开发的操作系统VK-I,因而该机器人特别适合于教学研究用.TITAN机器人拥有12个自由度的配置,由四条机构相同、结构对称的3自由度腿组成,可以实现臀关节的横摆、侧展以及膝关节的俯仰运动.
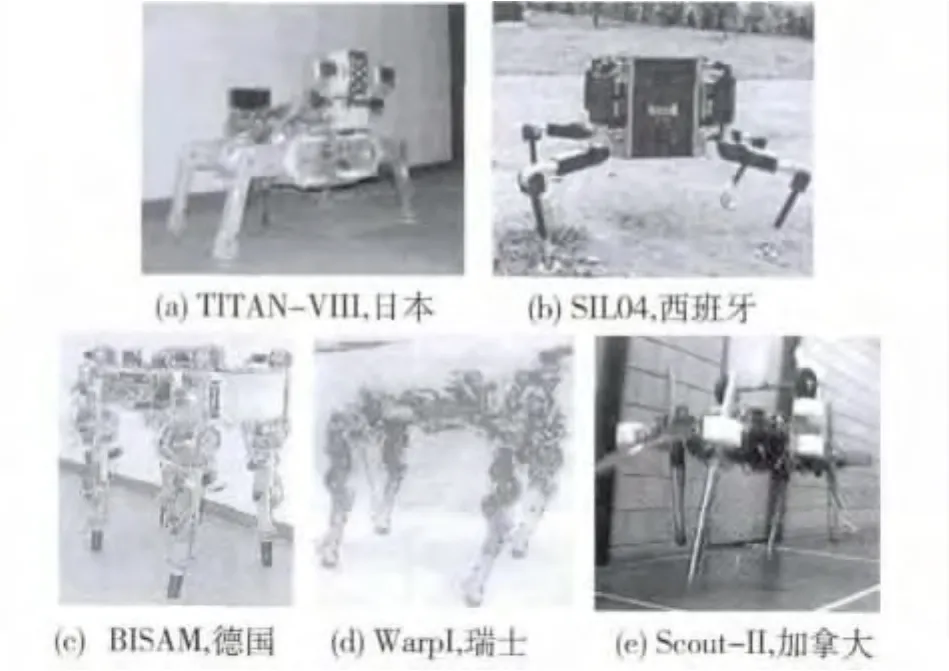
图1 早期四足移动机器人
SIL04型四足机器人由西班牙工业自动化协会研究开发,其长宽高为310 mm×310 mm×300 mm,满负荷重量为45 kg,可搭不超过15 kg的载荷,该款机器人,每条腿3个回转关节,安装有Pentium PC的机载计算机,具有三轴力传感器,用于捕获作用力,另外还装有相对速度传感器、姿态传感器等获取运动学信息.SIL04最高行走速度仅为1.5 m/min,越障高度约250 mm,具有在起伏地面行走的能力.
BISAM型四足机器人是由德国Ilg研究的,他们希望机器人具有动物那样的行走灵活性,为此基于CPG模型建立了行走步态机制实现机器人运动的控制.BISAM四足机器人整机重23 kg,高70 cm,在身体上布置有20个自由度,这使得机器人空间姿态非常灵活,但是由于采用直流电机驱动,其移动速度比较低.
其它的典型机器人,还有由瑞士KTH大学开发WarpI(1998),加拿大 McGill大学研制的Scout-I和Scout-II等,参见图1.
早期四足移动机器人,主要面向室内环境,用于研究足式仿生移动的运动机理,均具有移动速度不高,负载能力弱的问题,因此实际应用价值不高.
2 高性能四足移动机器人
KOLT是由美国斯坦福大学和俄亥俄州立大学合作开发的高性能四足移动机器人,是最早的能够实现跑跳的仿生四足自动装置,见图2.KOLT长为1.75 m、高为0.8 m、重量为80 kg,采用电机驱动,由电池组件提供能源[2].在跑跳试验中,KOLT是被安置在试验台架上并具有平面内自由移动的能力.KOLT最高能获得1.1 m/s的行进速度.

图2 KOLT,美国
BigDog由波士顿动力公司研制,号称是目前世界上最先进的四足机器人.如图3所示,BigDog长为1.1 m、高为0.7 m、重量为120 kg,随车携带有小型的发动机,集成高转速液压泵,采用液压驱动的方式使得整车产生移动.BigDog总共携带50多个传感器,用于收集控制系统所需的力、位置、速度、加速度、温度、噪声等信息[3].BigDog采用仿生机构设计,具有非常强的环境适应能力,资料显示它可以在山地、冰雪路面上轻松自如地行走,且可动态地保持稳定性.它可以站立、坐下、每次只抬一条腿的爬行蠕动步态行走,一次抬起一对对角腿的疾走步态,包含飞跃状态的奔跑步态和特殊飞奔步态下的跳跃.蠕动爬行步态的速度是0.2 m/s,疾走速度是1.6 m/s,跑步步态是2 m/s,在实验室内的跳跃瞬时速度可超过3.1 m/s.在泥地和雪地包括多种地面进行了测试,包括车辙下试验,多岩石和松散的碎石路,能跳1.1 m高,大狗的最长持续运行时长是2.5 h,连续行走10 km.
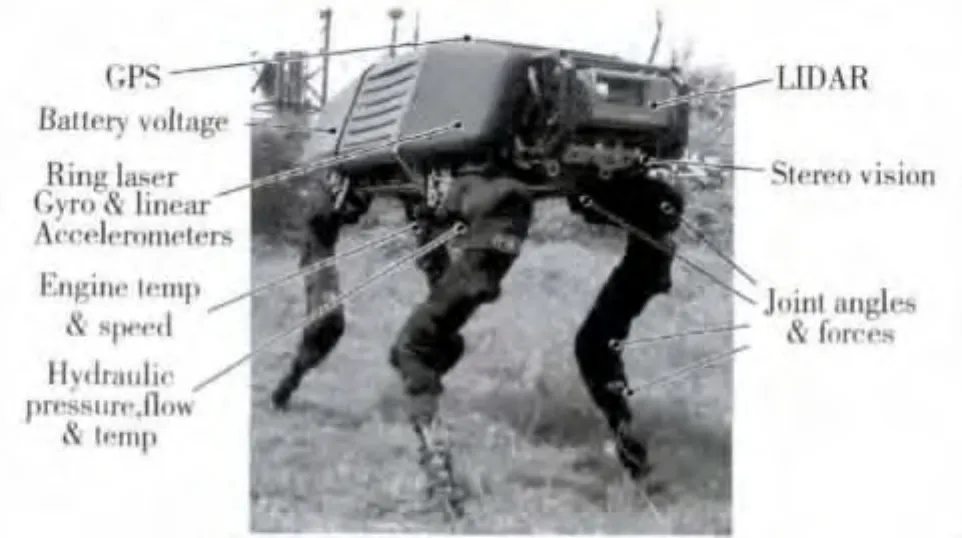
图3 BigDog,美国
HyQ是由意大利工业技术研究所 (IIT)研制的仿生四足移动机器人,不同于BigDog技术上采取保密措施,HyQ是首个完全公开研究方法和设计资料的通用研究平台,在其公开的技术文档中,不断地提供HyQ的研发、试验等资料,供全世界学者研究.如图4所示,HyQ长为1.0 m、高为0.98 m、重量为95 kg,采用电机 (臀部)和液压(臀、足部)复合驱动的方式[4].作为通用研究平台,HyQ可采用室内电缆、液压驱动组件 (含电池)、发动机3种模型进行驱动,设计时速达3~4 m/s,续航时间不低于8 h,从性能指标上看,是目前最高标准.
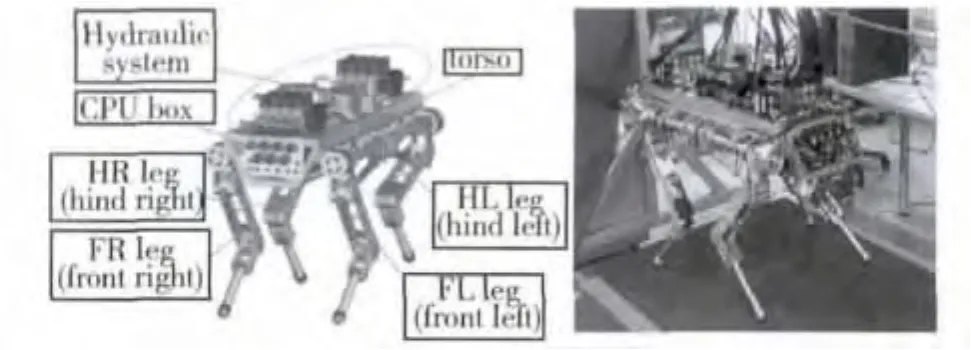
图4 HyQ,意大利
在BigDog基础上,美国DARPA与波士顿动力签订了一项新的开发项目,价值三千多万美元,主要是开发一种性能更高、驮运能力更强、结构更加简单可靠的四腿机器人,项目代号为Alpha Dog.它可以看做是大狗的升级版,其长度由原来1 m增加到1.5 m,总重达到280 kg,可搭载100 kg的重物.
目前,波士顿动力已经在互联网上公布新大狗进行样机试验的视频,见图5.另有消息称,波士顿动力拟开展120 km/h的机械猎豹研究,可实现急停、急转向.该成果一旦研究成功,将突破四足移动机器人行驶缓慢的问题,越野行驶速度将远超过履带和轮式车辆.
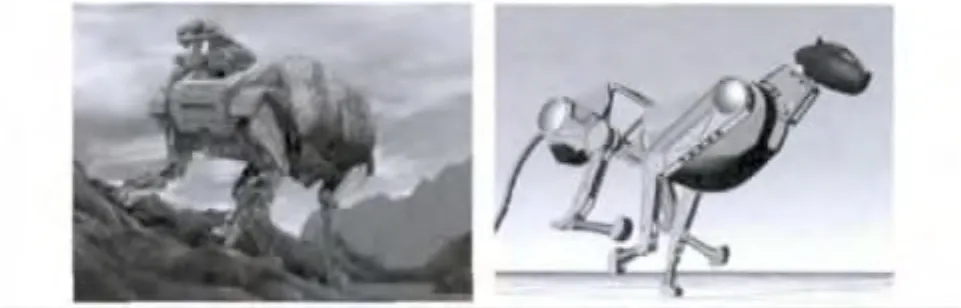
图5 Alpha Dog,美国
3 四足仿生移动平台关键技术分析
3.1 移动结构、机构设计技术
结构、机构是足式移动平台可实现全方位移动的关键系统,其系统的自由度数和工作空间是足式移动平台能够实现可能步态的几何基础,而足的布局形式、腿的质量都对稳定性和步态有较大的影响.
从仿生学角度看,四足哺乳类动物的骨骼生长类似.迄今为止,对四足动物仿生学研究比较广泛的是德国牧羊犬,参见图6.四足移动机器人要移动,则需要确定腿部关节的活动范围.此时,在大多数情况下,通过测量动物的生理结构特征,来获得所需的设计参数的输入.
计算采用SATWE,程序中选择按中震(大震)不屈服进行结构设计。验算时,水平地震影响系数最大值按中震取值(2.8倍小震=2.8×0.04=0.112),不考虑地震组合内力调整,荷载作用分项系数取1.0,组合值系数不变,材料强度取值标准值,抗震承载力调整系数1.0。底部加强区墙肢按中震不屈服及多遇地震(一级)分析结果的较大值进行设计。验算表明主要墙肢在此种工况下不出现整体受拉情况,保证了墙肢抗剪的有效性。

图6 德国牧羊犬的骨骼解剖图和大狗的仿生腿
如前所述,腿部关节由臀关节 (包括侧展、摆臂)、膝关节和踝关节4个主动关节组成.德国牧羊犬除侧展关节外,其余3个关节的活动范围如图7所示.
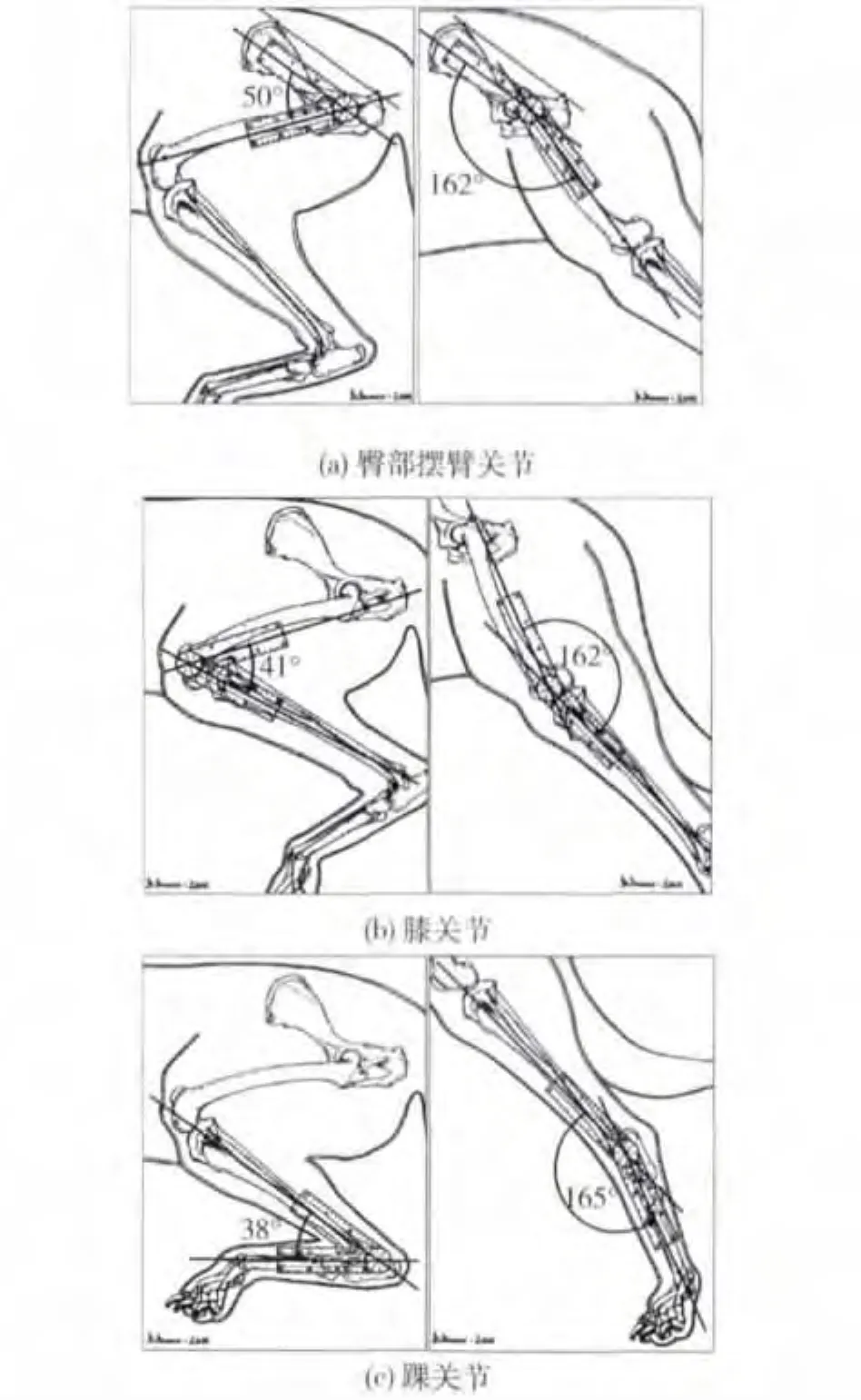
图7 德国牧羊犬的关节活动范围
根据上述关节分析,可对移动平台的各关节活动范围进行布置,参见表1.
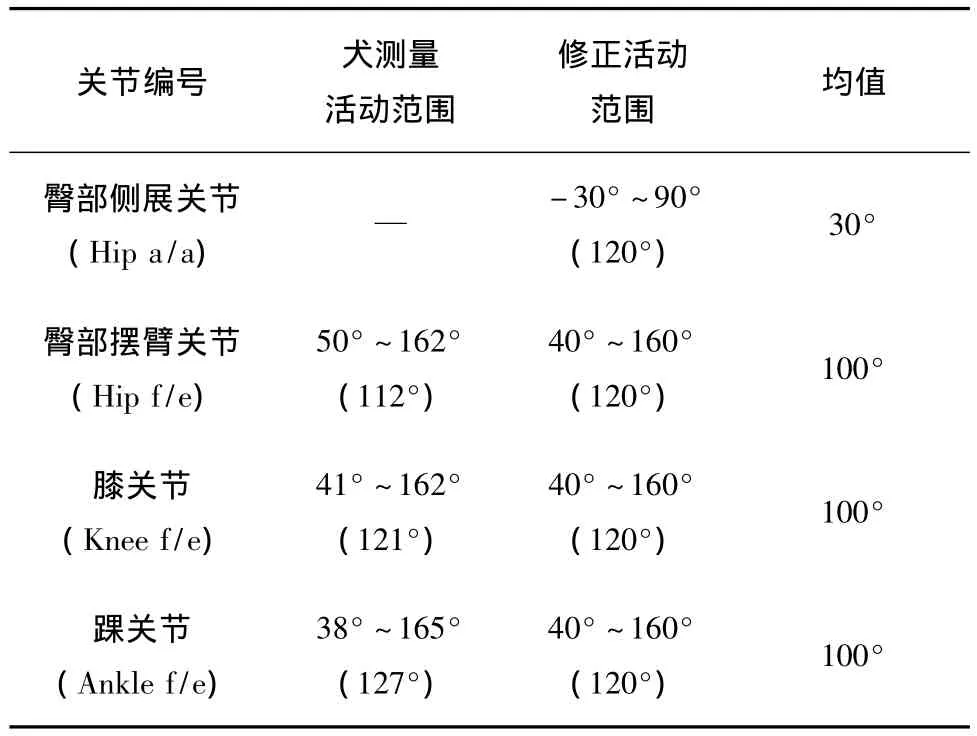
表1 关节活动范围及设计修正值
由表1可以看出:关节的运动范围基本都在112°~127°之间,均值约120°.考虑到单一型号的液压缸能够大幅度降低系统复杂程度,则对所有关节采用统一活动范围配置,即都采用120°的活动范围均值,修正后的值也列在表1中.
3.2 移动仿生研究及步态规划
步态是指动物节律性运动的形态,其特点是抬落腿的顺序和轨迹具有明显的周期性特征,是一种规律性强、周期性明显的节律运动.目前研究较多的步态方式是模仿马或狗等四足动物行走典型步态,按照腿不同相位的交替次序区分,常用步态为:行走步态,即4条腿按照一定顺序轮流进行摆动相或支撑相;对角小跑步态,即对角腿两两一组,按照一定顺序轮流进行摆动相或支撑相;溜蹄步态,即同侧腿两两一组,按照一定顺序轮流进行摆动相或支撑相;奔跑步态,即前后腿两两一组,按照一定顺序轮流进行摆动相或支撑相,参见图8.动物通过对外部环境的判断,交替运用各种步态,实现基本的移动行为,抵抗外部扰动并实现姿态的稳定.
步态的研究就是通过对动物的真实的运动过程进行捕捉、分析,提炼出适应各个环境的步态.为此,需要对各种步态进行合理规划,找到在仿生平台中对应各关节的函数,给各个运动关节赋予相应的控制变量,可以离线也可以在线根据环境实时产生关节的驱动函数,使得平台能象动物一样产生稳定的前进位移,并且脚掌不与地面撞击.通过对步态规划实现方式的仿真分析得到工程模型.
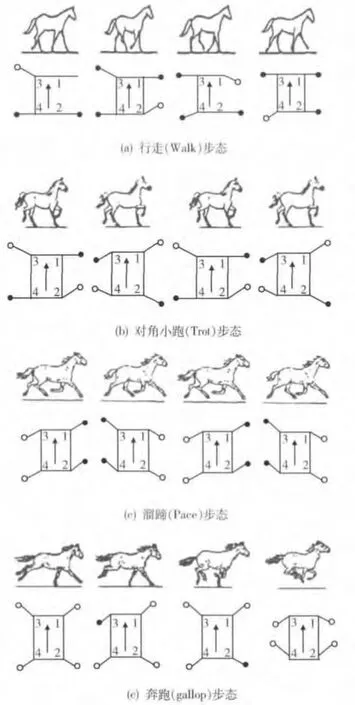
图8 马的四足步态仿生学图解
3.3 移动及稳定性控制算法研究
四足机器人移动及稳定性控制算法是四足移动平台最重要的关键技术,随着计算机技术革命的深入,其运动控制方法已有了长足的发展,总结起来主要有3种:基于模型的运动控制方法,基于中枢模式振荡器CPG的运动控制方法、基于虚拟腿的运动控制方法。
3.3.1 基于模型的运动控制方法
但是,当被控对象比较复杂,且为可移动的非完整约束时,采用该种方式进行控制存在计算周期长,响应难于收敛的问题,在高性能四足机器人上应用案例并不多见.但是,该控制算法,在低速移动情况下,算法成熟稳定,即使在崎岖地形条件下,借助于摄像头、激光雷达等感知元件,可实现非常复杂的运动姿态,因此,依然具有强健的生命力.
3.3.2 基于中枢模式振荡器CPG的运动控制方法
CPG运动控制方式是一种模拟动物中枢模式振荡器的仿生学原理,用于控制低级节律运动的新的控制方法,国内外学者对其开展了大量的研究.张秀丽在Matsuoka神经振荡器和Kimura神经振荡器的基础上,构造了四足机器人的CPG控制策略,其数学模型为[6]:
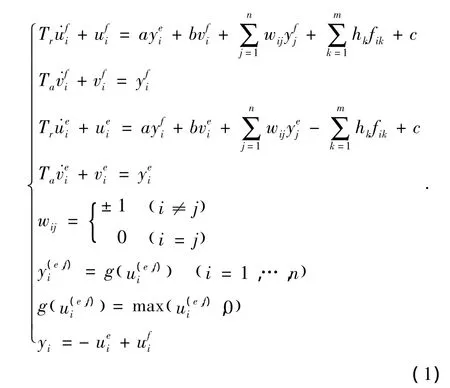
式中:i代表第i个振荡器;f代表屈肌神经元,e代表伸肌神经元;n表示振荡器个数,m表示反馈项数;ui(e,f)代表第i个神经元的状态;b为适应系数,自抑制程度的常数项系数;a为细胞间互抑系数,连接伸肌到曲肌的权重;wij为神经元j到i的连接权重;Tr,Ta分别为时间常数;g(u)为压限函数;yi为第i个输出;hkfik为CPG控制网络的外部反馈项.
运用上述方法,可以非常方便地产生节律性运动,通过调用模式控制矩阵实现各种步态间的自动切换,并且可对一定范围内的外部激励进行管理和响应,在低起伏路面下能获得良好的控制效果.但是采用CPG算法的参数较难整定,需要通过仿真和试验试凑获得,物理意义不明确,给控制算法的开发周期带来不确定因素.
3.3.3 基于虚拟腿的运动控制方法
虚拟腿控制算法是由Raibert首先提出的,其主要思想是把机器人设想为质量-弹簧系统,并将其行为分解为3个基本动作 (见图9):弹跳高度控制,即通过弹跳控制身体质心上升和下降的高度;前行速度控制,即通过在摆动项,通过选择落脚点控制前行速度;身体姿态控制,即通过在支撑项,根据不平衡力矩调整关键力矩控制身体姿态.

图9 “质量-弹簧”系统行为控制
在上述行为动作分解基础上,提出各阶段应用的力学方程[7]:
1)弹跳高度控制方程

2)前行速度控制方程
(1)计算落脚点

(2)计算运动角度

(3)计算伺服控制力矩

3)身体姿态控制方程

式(2)为假想的质量-弹簧系统作用力计算方程,其中k为虚拟弹簧刚度;→r0为虚拟腿臀部关节到接地点刚接地时的矢量;→r为虚拟腿臀部关节到接地点实测矢量.式(3)~式(5)中:xf为落脚点;˙x为期望前行速度;k˙x为比例系数;Ts为从上一落脚点至该落脚点的周期;φ为当前关节角度;kp、kv为比例系数;τv为作用力矩.式(6)中τp为作用力矩;kp、kv为比例系数.
上述控制方法被先后用在Raibert研发单足、双足、四足机器人上,包括最新的研究成果BigDog.当虚拟腿算法应用在大于1条腿的机器人时,以四足机器人对角小跑为例,分别在支撑项、摆动项只有两条腿起作用,可以将两条对称运动的腿,看做一条腿,进而运用虚拟腿控制算法,四足机器人相当于两个虚拟腿系统交替使用,实现行走.
4 结论
目前,在移动平台领域,主要以轮式、履带式行走机构为主,在越野性能上存在一定的局限性,特别是在极限环境条件下,不能适应全地域通行需要.以美国波士顿动力BigDog为代表的高性能足式移动平台,代表着未来移动平台的一个全新发展方向.早期,基于传统机械系统设计方法的步行移动平台一直无法解决能耗问题,行驶速度低,输出力矩小,无法满足越野行走的各种环境条件要求.随着新的设计方法、控制算法、液压系统、机器人及计算机技术的发展,步行移动平台的能耗问题得以初步解决,其最高行驶速度理论上能够达到130 km/h以上.
四足仿生移动平台最核心的关键技术是如何实现动态稳定行走,其次需解决速度与能源的矛盾,更长的行走距离,即更快的行驶速度、更低的能源消耗将是未来四足移动平台实用化所必须解决的工程实际问题.尽管现阶段存在诸多局限性,但无疑四足仿生移动平台因其较强的野外运动能力,必将得到大力研究和应用.
[1]Boston Dynamic,BigDog Overview [OL].(2008-11)[2012-04].http://www.bostondynamics.com/img.
[2]Kenneth J. Waldron.A Coordination Scheme for an Asymmetrically Running Quadruped[C].//12th IFToMM World Congress,Besancon(France),June18-21,2007.
[3]BigDog,the Rough-Terrain Quaduped Robot [OL].(2008-11)[2012-04].http://www.bostondynamics.com.
[4]Claudio Semini,Nikos G.etc.Design of HyQ-a Hydraulically and Electrically Actuated Quadruped Robot[J].IMechE Part I:J.Systems and Control Engineering,2011,10(1):1-20.
[5]郑浩峻,张秀丽,关 旭,等.基于生物中枢模式发生器原理的四足机器人 [J].清华大学学报:自然科学版,2004,44(2):166-169.
[6]张秀丽.四足机器人节律运动及环境适应性的生物控制研究[D].北京:清华大学博士论文,2004.
[7]Raibert,M.H.Legged robots that balance [M].Cambridge MA,MIT Press,1986.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
北京航空航天大学学报(2022年6期)2022-07-02
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
中华骨与关节外科杂志(2016年3期)2016-05-17
电源技术(2015年9期)2015-06-05
电测与仪表(2014年14期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
