
基于RFID的虚拟标签算法研究与改进*
2014-12-10 05:38邹传云
电子技术应用 2014年10期
何 毅,黄 俊,邹传云
(1.西南科技大学 网络信息中心,四川 绵阳 621010;2.西南科技大学 信息工程学院,四川 绵阳 621010)
0 引言
随着无线射频识别技术(Radio Frequency Identification,RFID)的发展,室内无线定位已经越来越受到人们关注。经过近十年的不断研究,LANDMARC(Location Identification Based on Dynamic Active RFID Calibration)室内定位系统以其成本低、效率高、定位精度较高而得到了一定的发展[1-3]。为了提高定位精度,在LANDMARC算法中,使用线性插值法插入虚拟标签得到VIRE(Virtual Reference Elimination)算法,但是目前这两个算法的定位精度都还有提高的空间,并且都存在边界标签定位精度不高的缺点[4-5]。
1 LANDMARC和VIRE算法
LANDMARC算法采用参考标签来定位未知标签,它在环境中按照固定方式布置少量位置已知的参考标签作为定位的基准参数,通过比较阅读器测得目标标签RSSI场强值(接收信号强度)与阅读器测得参考标签RSSI场强值的相对大小对目标标签进行定位[4-5]。VIRE算法是在不改变LANDMARC算法中所有标签和阅读器位置的情况下,在参考标签间通过线性插值法插入虚拟标签来增加已知的位置参考数据,从而增大定位精度。VIRE算法在LANDMARC原有的模型上将每4个参考标签看作一个单元网格,再将该单元网格进一步细分为N×N的小网格[6-7]。假设环境理想,可以得到虚拟标签和实际存在并已知坐标的参考标签的场强值是成线性关系[8-10],通过已知参考标签的场强求出虚拟参考标签的场强值,如图1所示线性插值法下VIRE算法的定位结果。

图1 VIRE线性插值仿真结果图
2 算法改进分析
图1中待定位的标签一共有10个,从图中可以看出,1、6、7、10号标签的定位精度明显低于其他标签,而且其他标签的定位精度也还有改善的空间。本文通过采用非线性(拉格朗日)插值法插入虚拟标签和在边界插入虚拟标签两种方式来改进标签的定位精度。
2.1 拉格朗日法
把VIRE算法中的线性插值改为拉格朗日非线性插值[8],现在假设二维坐标系下有两个点 a(x0,y0)和 b(x1,y1),先采用线性插值法,得到线性插值公式为:

式(1)变形为:

式(2)右端的两个线性因素就是拉格朗日系数因子,可以将其表示为:

由式(2)和式(3)得到一阶拉格朗日插值公式:

有 N+1 个已知坐标点,分别为(x0,y0),(x1,y1),(x2,y2)…(xN,yN),可以推广得到N阶拉格朗日公式为:

由于实际环境并不是理想的,虚拟标签和实际存在并已知坐标的参考标签的场强值不是成线性关系。拉格朗日插值法是在已知标签和阅读器的距离中非等间距地插入虚拟标签,通过该插值方式得到的模型更加接近于实际环境,因此得到待定位标签的定位精度高于采用非线性插值的VIRE算法定位。
2.2 加入边界虚拟标签
使用VIRE算法定位的标签越靠近边界时其定位误差会越大。这是由于在定位系统的边界处,已知坐标的参考标签变少了,所以当定位标签离目标标签较远时,只能作大概估计并且有可能引入误差数据,从而导致很大的误差。为了进一步提高VIRE算法的整体定位精度,可以在边界上插入虚拟标签,如图2所示。
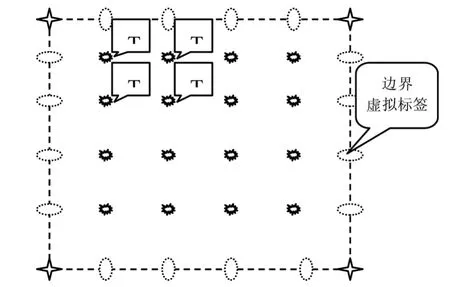
图2 边界标签定位模型
非边界上的虚拟标签是靠已知的参考标签(T1/T2/T3/T4)来获得 RSSI值的,那么边界虚拟标签可以通过实际参考标签的坐标和RSSI建立回归方程,通过这样的方式来获得边界虚拟标签的RSSI。
回归方程:
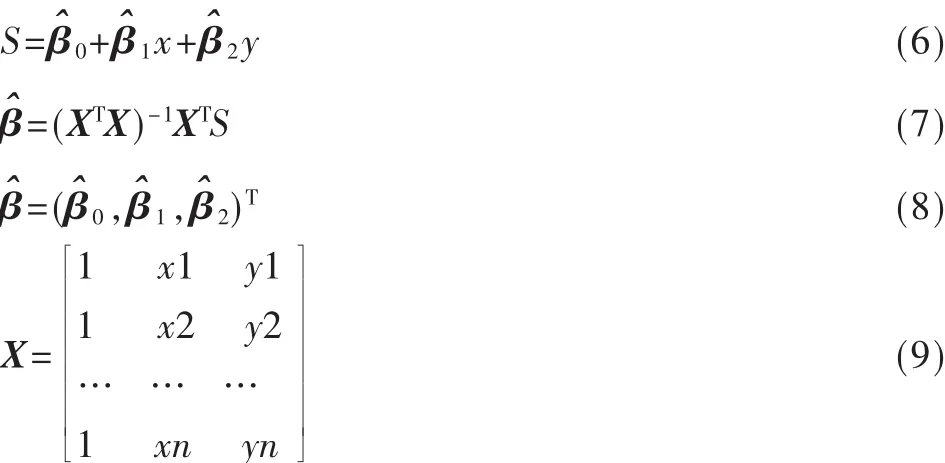
以图2为例,现在有一边界坐标是(x1,y1),那么根据上式可以将坐标值组成的矩阵X和RSSI组成的矩阵S带入,求得,之后就可以根据式(6)求出 S。
在边界上加入了虚拟标签,增加了边界上面的已知数据,则在计算边界附近和边界上的待定位标签时就不会再引入误差标签,可以增加其定位的准确性。
3 实验仿真
给定路径损耗指数为n=2的条件下,在一个8 m×8 m的空间里布置阅读器和参考标签。然后随机放置10个待定位的标签,虚拟标签的插值方式采用非线性拉格朗日插值法,可得到定位结果如图3、图4所示。

图3 拉格朗日插值仿真结果图
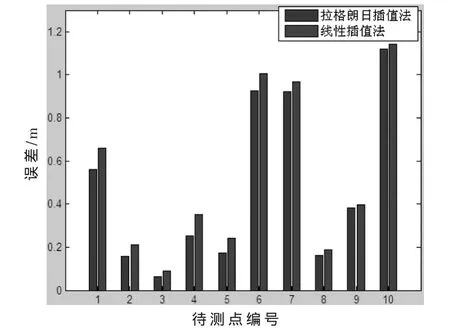
图4 拉格朗日插值与线性插值误差比较图
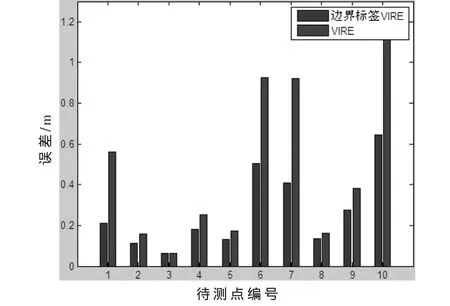
图6 BVIRE与VIRE定位误差
由图3、图4可知,在虚拟标签插值方式由线性插值改变为拉格朗日非线性插值后,所有待定位标签的定位精度都得到了提升,特别是 2、4、5号标签的定位精度提升较大。计算可知,2号标签定位精度提升了22%,而4号标签定位精度提升了32%,5号标签提升了35%。
通过改变虚拟标签的插值方式对标签的定位精度都有所提升,但对邻近边界的1、6、7、10号标签的定位精度提升比例还不大,定位仍存在较大的误差。下面在改变虚拟标签插值方式的基础上,以同样的方式在边界插入虚拟标签,可得定位结果如图5、图6所示。
由图5、6可知,在边界上插入虚拟参考标签以后,1、6、7、10号标签的定位误差有了大幅度的减小,定位精度提升比例较大。相比 VIRE算法,1、6、7、10号标签定位精度分别提升 66.7%、44.5%、55.56%、41.2%;同时对只改变虚拟标签的插值方式进行定位的其他标签的定位精度也有一定的提高。
4 结论
本文基于VIRE定位算法,提出了新的改进方法,将其虚拟标签的插值方式由线性插值方式改为拉格朗日非线性插值方式,使虚拟参考标签的坐标更接近于实际位置,同时在边界插入虚拟参考标签。实验结果表明,该方法比VIRE算法定位误差有明显减小,能有效提高定位的整体精度,并对邻近边界目标的定位精度有更大的提高。
[1]俱莹,刘开华,史伟光,等.基于 RFID的边界虚拟参考标签定位算法[J].计算机工程,2011,37(6):274-276.
[2]Zhu Xiuyan,Feng Yuan.RSSI-based algorithm for indoor localization[J].Communications and Network,2013(5):37-42.
[3]何毅,徐利,邹传云.折叠偶极子阵列无芯标签极点特性分析[J].电子技术应用,2013,39(5):111-113.
[4]李军怀,张果谋,于蕾,等.面向室内环境的RFID定位方法分析与仿真[J].计算机工程,2012,38(14):266-279.
[5]陈瑞鑫,邹传云.有源 RFID定位系统设计与实现[J].电子技术应用,2010,36(10):114-116.
[6]Xie Yinggang,Kuang Jiaoli,Wang Zhiliang,et al.Indoor location tehnology and its applications base on improved LANMARC algorithm[J].IEEE Chinese Control and Conference,2012(4):38-41.
[7]葛志军,郝永生.一种嵌入式RFID读写器的内部数据管理研究[J].电子技术应用,2012,38(6):34-40.
[8]Zhu Fengjuan,Wei Zongheng,Hu Binjie.Analysis of indoor positioning approaches based on active RFID[C].5th Inter-national Conference on Wireless Communication,Networking and Mobile Computing,2009:24-26.
[9]陈家琪,研梓乘.一种 Newton插值的RFID室内定位算法改进[J].计算系统应用,2012,21(1):45-48.
[10]张骁耀,王玫.基于CSS技术的室内定位通信系统的研究与实现[J].微型机与应用,2012,31(13):49-52.
猜你喜欢
电子设计工程(2022年15期)2022-08-17
英语世界(2020年10期)2020-11-06
英语世界(2020年2期)2020-03-08
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
数学物理学报(2019年1期)2019-03-21
测控技术(2018年4期)2018-11-25
新青年(2018年8期)2018-08-18
雷达学报(2017年1期)2017-05-17
咸阳师范学院学报(2016年6期)2017-01-15
