多导弹分布式协同制导与控制方法
2014-12-19 00:54孙雪娇
北京航空航天大学学报 2014年1期
孙雪娇 周 锐 吴 江
(北京航空航天大学 飞行器控制一体化技术重点实验室,北京100191)
陈哨东
(洛阳电光设备研究所火力控制技术国防科技重点实验室,洛阳471009)
在当前导弹防御体系不断增强和网络中心战逐渐取代平台中心战的情况下,研究多枚导弹的协同显得尤为重要[1].多导弹之间通过信息共享实现配合、协作,共同完成打击任务,极大地增强了导弹的打击能力,增加了导弹的突防和摧毁目标的概率,而且能够完成单枚导弹无法完成的任务.
文献[2]给出了一种飞行时间可控的制导律(ITCG,Impact-Time-Control Guidance).文献[3]将ITCG制导律作为下层导引律,上层为协调算法,实现对制导时间指令的解算,下层由ITCG实现对制导时间指令的跟踪.文献[4]提出了一种基于分散式协调策略的同构多导弹协同制导方法.在文献[3-4]的基础上,文献[5]基于平衡强连通有向图镜像运算方法研究了网络拓扑跳变下多导弹同时击中目标的分布式协同制导时间一致问题.事实上,基于时间可控制导律的协同制导方法对制导律的依赖较大,目前仍然缺乏一类可用于机动目标的制导时间可控的制导律,因此限制了该方法在机动目标协同攻击上的应用.
文献[6]提出一种基于相邻局部通信的“领弹-被领弹”异构多导弹网络化分布式协同制导方法,该方法通过视线距离及视线角的协同实现协同攻击,该方法最终得到了协同制导律实现所需要的切向及法向加速度,但是在将该方法应用到机动目标时,需要考虑目标加速度在视线切向和法向的投影,需要的目标信息较多,难以获得.
带有领弹的异构多导弹协同问题也是研究的热点,文献[7]提出了一种基于虚拟领弹和被领弹策略的多导弹时间协同制导律.但与文献[6]类似,应用到机动目标上仍然较难实现.
目前国内外针对导弹协同攻击问题的研究还非常有限,尤其是针对三维机动目标的协同攻击问题.本文将基于网络同步原理设计三维位置协同攻击算法并设计切换控制器实现对控制指令的跟踪.
1 协同攻击策略及实现
1.1 图论基础及网络同步原理
研究多智能体系统的一致性问题时,图论是一个有力的工具,不论是多无人机、多卫星系统,还是自然界的动物群落,在研究它们的性质时,都可以将其抽象为一个图,进而用图论工具进行分析,原系统中所有的个体都可以抽象成一个节点,个体之间的联系用边来表示,联系的强弱可用边的权值来衡量.下面简单介绍图论的基础知识.
定义 Laplace 矩阵 L=[lij]∈Rn×n(i,j∈I)如下:
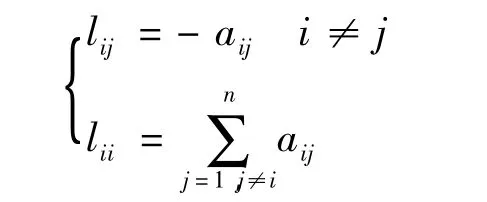
复杂网络系统中的分布式网络同步算法用于实现使多智能体状态渐近趋于一致.带有leader的多智能体网络拓扑结构中,leader具有独立的不随followers改变的状态,将leader状态作为协同策略的一部分加入到网络同步算法中即可实现followers状态渐近一致趋于 leader状态,这种leader-follower的拓扑结构在多弹协同中多用于使从弹的状态跟随领弹从而一起攻击目标.多弹协同攻击机动目标的实质即是实现导弹(x,y,z)3轴位置与目标3轴位置的协同,且目标本身状态独立,因此本文借鉴leader-followers结构,假设目标位置已经通过滤波等估计算法获得,将目标视作领弹来实现网络同步协同算法.
1.2 协同攻击策略
基于网络同步原理设计攻击机动目标的分布式协调策略.
基于网络同步的设计思路,对于n个导弹系统协同攻击单个机动目标的情形,控制系统总体结构如图1所示.可见,第i个导弹控制器系统分为两部分:①通过分布式网络同步算法获得指令协同的速度及弹道角度指令信号;②通过设计切换控制器实现对速度及弹道角度指令信号的跟踪.在仿真中将实际的速度及弹道角度代入同步算法,验证在经过实际的自动驾驶仪后对同步算法实现的影响.
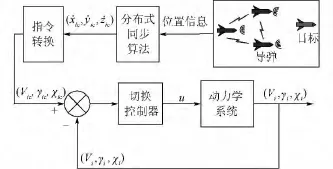
图1 协同制导与控制系统结构
现在的目标就是设计一个网络同步协调算法,从而实现多枚导弹渐近收敛于目标的位置.下面给出网络同步协同策略.
假设1 惯性坐标系下目标的位置(xt,yt,zt)及速率可测.
BELLA将40焦耳的能量(相当于相机闪光能量的好几倍)装入仅仅持续40飞秒的红外脉冲中,这个时间比蜜蜂拍一下翅膀还要快1万亿倍。对于这种激光脉冲如果击中一个人的话会发生什么情况,BELLA主管维姆·利曼斯(Wim Leemans)不愿意进行任何猜测,但是可以肯定地说,他会受到严重伤害,甚至会死亡。
假设2 每枚导弹的速度Vi可控.
由假设 1,目标的位置(xt,yt,zt)可测,事实上每个导弹的位置(xi,yi,zi)也可以获知,基于此,本文以定理形式给出如下协同攻击同步算法.
定理1 假设一个多弹网络具有固定拓扑结构G=(V,E,A),每个导弹3个位置通道分别采用如下分布式网络同步策略:
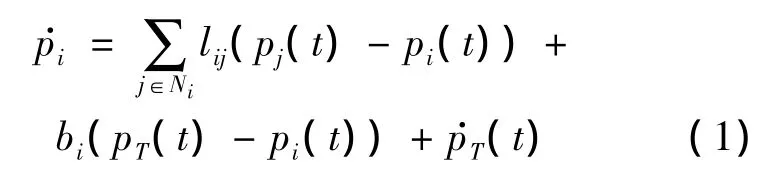
若满足λmax(L-B)<0则可以实现所有导弹状态收敛于目标状态 pT.其中,下标 i=1,2,…,n为第i个导弹;pi为3个位置通道 xi,yi,zi其中1个通道;pT为目标的3个位置通道xt,yt,zt中与导弹对应的1个通道;Ni为导弹的通信邻域集合;pj为与导弹有通信连接的导弹j的位置;p·T为目标3个通道的速度;L=[lij]为图G的Laplace矩阵;B=diag(b1,b2,…,bn)为导弹与目标之间的加权邻接矩阵,若导弹不能获取目标状态信息则bi=0,否则bi>0;λmax(·)为矩阵的最大特征值.
证明 将式(1)经简单变换表达为
定义参与协同攻击的导弹i与目标T之间状态误差ei(t)=pi(t)-pT(t),则式(2)可以表达为
定义 e=[e1,e2,…,en]T,将式(3)表达为矩阵形式:

因此当λmax(L-B)<0,t→∞状态误差e(t)→0,即可实现导弹位置与目标位置趋于同步. 证毕
在上述证明过程中t→∞时导弹才能实现同步到目标位置,但是在实际实现时,可以通过选择Laplace矩阵的系数提高收敛速度.另外,当导弹与目标的距离在一定范围内时即可完成攻击任务.
本节采用式(1)的分布式网络同步算法完成导弹的协同攻击,得到了完成同步所需要的导弹3个速度分量信息.
1.3 协同攻击策略的实现
式(1)给出了协同攻击的策略,为了实现该协同攻击策略,参与协同攻击的每枚导弹需要实现对式(1)给出的3个方向速度分量的跟踪.
考虑到参与协同攻击的每枚导弹具有如下运动学关系:
通过实现式(6)给出的指令,可以实现式(1)给出的多弹协同攻击算法.
2 自动驾驶仪设计
为了验证加入自动驾驶仪对协同网络同步算法的影响,下面考虑加入自动驾驶仪实现导弹对网络同步指令的跟踪.
通过式(6),同步算法给出的指令转化为速度、弹道倾角、弹道偏角指令的形式.
为了实现同步算法,假设导弹的速度可以调节,并以一个二阶传递函数表示自动驾驶仪的影响,即

其中,ω,ζ分别为二阶传递函数的响应频率和阻尼.考虑到速度响应属于慢变环节,在仿真中ω应取较小的值.
假设考虑的导弹为轴对称构型,俯仰、偏航和滚动3个通道的耦合较小,且俯仰和偏航对称,因此仅考虑俯仰通道自动驾驶仪的设计,偏航通道与俯仰通道完全相同.
以一个导弹为例建立导弹俯仰通道动力学模型如下[8]:
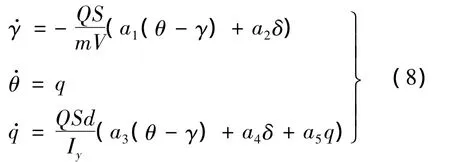
其中,γ为弹道倾角;V为导弹速度;θ为俯仰角;q为俯仰角速率;S为导弹的参考面积;m为导弹质量;ai(i=1,2,…,5)为系数;d为导弹的参考常数;Iy为绕y的转动惯量;δ为俯仰舵偏;Q为动压;定义状态变量 ξ=[γ θ q]T,考虑到速度变化,建立线性切换系统形式的模型:

其中,下标 σ(t,V):[0,+ ∞)→Ω ={1,2,…,m}为切换序列,m为设计点个数;uσ为控制输入;y(t)为系统输出;系数矩阵定义如下:
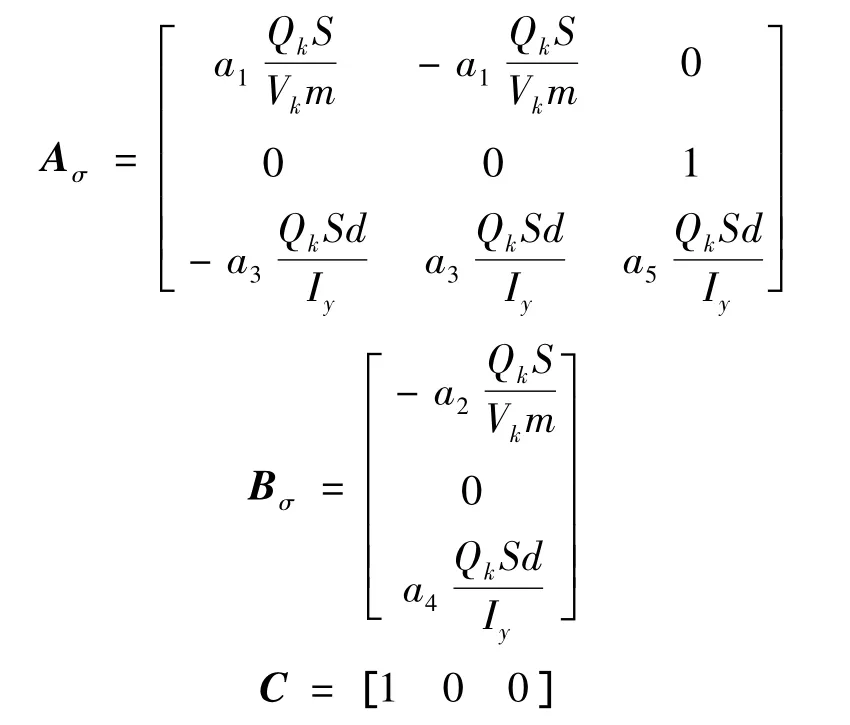
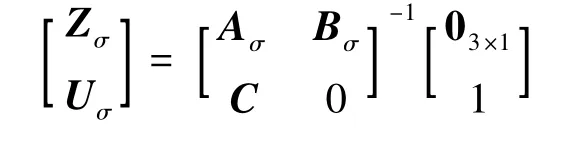
其中,下标k∈Ω.在控制器设计时,考虑到速度变化,设计一种以速度为调度信号的切换控制律[9]:

其中,r为参考指令信号,在本文中为同步算法给出的弹道倾角指令值;Kσ为设计点处的状态反馈矩阵,保证每个设计点处闭环系统稳定,且
3 仿真验证
考虑3枚导弹对机动目标的三维协同攻击问题,要求3枚导弹同时攻击目标.
目标初始位置在(0,0,2 000)(km),以速度200 m/s机动飞行,3枚导弹从不同位置出发,初始速度均为500 m/s.导弹的通信拓扑如图2所示,其中将目标看作领弹,从而可以和部分导弹进行通信,选择合适的 Laplace矩阵 L与 B满足λmax(L-B)<0.表1中为各个导弹的初始位置及协同攻击时间.图3为3个导弹(M1~M3)与目标(T)的三维飞行轨迹;图4为速度分量指令,图5~图7为速度及弹道角跟踪曲线,图8为2个通道的控制指令.
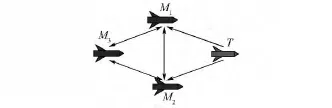
图2 多导弹通信拓扑
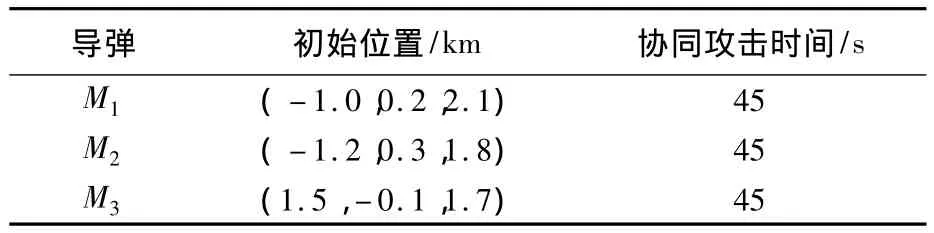
表1 导弹初始参数及仿真结果
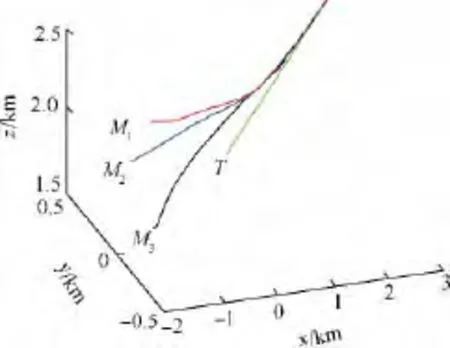
图3 导弹及目标的三维飞行轨迹
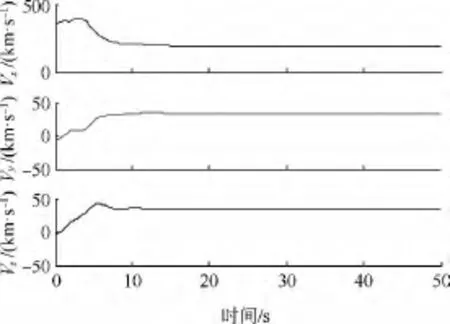
图4 导弹M1速度分量指令信号
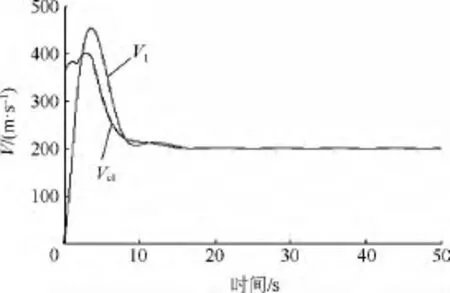
图5 导弹M1的速度指令跟踪曲线
由图3的飞行轨迹显然可见3枚导弹实现了对机动目标的协同攻击.图4为网络同步协调策略给出的导弹M1的3个速度分量.
图5~图7为切换控制器对3个指令的跟踪.可见在存在自动驾驶仪动态特性的情况下仍能实现多弹协同攻击.图8为导弹M1的2个通道的控制指令.
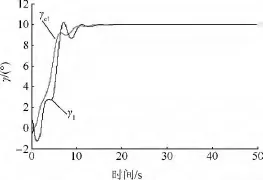
图6 导弹M1的弹道倾角指令跟踪曲线
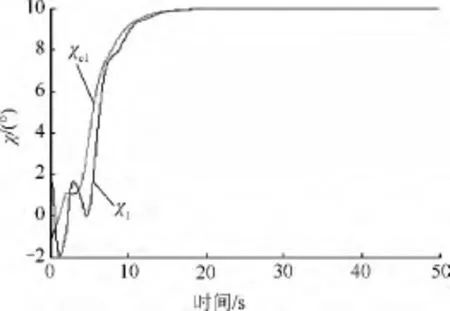
图7 导弹M1的弹道偏角指令跟踪曲线
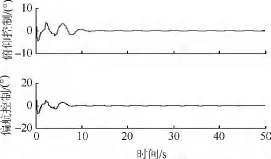
图8 导弹M1的2个通道的控制指令
4 结论
本文针对多枚导弹三维空间协同攻击机动目标要求,基于网络同步原理设计了导弹位置同步算法,其中运动目标视作“领弹”,每个导弹仅与视距邻域内的导弹或者目标进行通信,组成“领弹-从弹”的通信拓扑,从而实现所有导弹位置渐近一致收敛于目标位置,即可以实现多弹协同攻击.设计了切换控制器来跟踪经坐标转换后的同步指令,实现多弹协同制导与控制的闭环仿真.
References)
[1] 王建青,李帆,赵建辉,等.多导弹协同制导律综述[J].飞行力学,2011,29(4):6 -10 Wang Jianqing,Li Fan,Zhao Jianhui,et al.Summary of guidance law based cooperative attack of multi-missile method[J].Flight Dynamics,2011,29(4):6 - 10(in Chinese)
[2] Jeon I S,Lee J I,Tahk M J.Impact-time-control guidance law for anti-ship missiles[J].IEEE Transactions on Control Systems Technology,2006,14(2):260 -266
[3] 赵世钰.多飞行器协同制导方法研究[D].北京:北京航空航天大学,2009 Zhao Shiyu.Multi-vehicle cooperative guidance law study[D].Beijing:Beijing University of Aeronautics and Astronautics,2009(in Chinese)
[4] Zhao Shiyu,Zhou Rui.Cooperative guidance for multimissile salvo attack[J].Chinese Journal of Aeronautics,2008,21(6):533-539
[5] 彭琛,刘星,吴森堂,等.多弹分布式协同末制导时间一致性研究[J].控制与决策,2007,25(10):1557 -1562 Peng Chen,Liu Xing,Wu Sentang,et al.Consensus problems in distributed cooperative terminal guidance time of multi-missiles[J].Control and Decision,2007,25(10):1557 - 1562(in Chinese)
[6] 邹丽,丁全心,周锐.异构多导弹网络化分布式协同制导方法[J].北京航空航天大学学报,2010,36(12):1432 -1435 Zou Li,Ding Quanxin,Zhou Rui.Distributed cooperative guidance for multiple heterogeneous networked missiles[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(12):1432-1435(in Chinese)
[7] 张友安,马国欣,王兴平.多导弹时间协同制导:一种领弹-被领弹策略[J].航空学报,2009,30(6):1109-1118 Zhang Youan,Ma Guoxin,Wang Xingping.Time-cooperative guidance for multi-missiles:a leader-follower strategy[J].Acta Aeronautica et Astronautica Sinica,2009,30(6):1109 - 1118(in Chinese)
[8] Lawrence D A,Kelly J H,Evers J H.Gain scheduled missile autopilot design using a control signal interpolation technique[R].AIAA-98-4418,1998
[9] 迟学谦,王青,侯砚泽.倾斜转弯导弹的鲁棒跟踪切换控制[J].上海交通大学学报,2011,45(2):284 -289 Chi Xueqian,Wang Qing,Hou Yanze.Robust model following switching control of BTT missile[J].Journal of Shanghai Jiaotong University,2011,45(2):284 -289(in Chinese)
猜你喜欢
湖南电力(2022年3期)2022-07-07
学校教育研究(2020年11期)2020-06-08
通信电源技术(2020年9期)2020-01-08
制导与引信(2017年3期)2017-11-02
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
雷达与对抗(2015年3期)2015-12-09
科技传播(2015年20期)2015-03-25
太空探索(2014年1期)2014-07-10